Kerekeken a Naprendszerben 6. rész
A Curiosity 1. rész
A Spirit és az Opportunity sikere megnyitotta az utat a Mars jelenének és múltjának megismerése előtt. A NASA pedig folytatni akarta a víz és - amennyiben létezett valaha - az élet nyomai utáni kutatást, ezért belefogott egy olyan mozgó laboratórium kifejlesztésébe, amely képes megtalálni ezeket a nyomokat. A két Mars Exploration Rover útja teljes egészében sikeresnek tekinthető, azonban volt néhány olyan szerkezeti tulajdonságuk, amely idővel hátráltatták a működésüket és csökkentették a hatékonyságukat. Ezeket kiküszöbölve a NASA 2011-ben elindította a Mars felé legújabb roverjét, a Curiosity-t, ami a mai napig tevékenykedik a bolygó felszínén. Ebben a részben 2013 végig követjük nyomon a rover történetét.
A Spirit és az Opportunity éppen csak megkezdték kutatási programjukat a Marson, amikor a NASA már hozzálátott a következő rover missziójának megtervezéséhez Mars Science Laboratory néven. A két MER rover sikeresen megtalálta az egykor a Mars felszínén létező folyékony vízre utaló a bizonyítékokat, a NASA pedig ezen a nyomon elindulva arra a kérdésre kereste a választ, hogy lehettek-e egykoron az élet létrejöttéhez megfelelő körülmények bolygó szomszédunkon. A program céljaként egy olyan, a MER-eknél fejlettebb és nagyobb tömegű rovert szerettek volna eljuttatni a Marsra, amely arra a kérdésre keresi a választ, hogy volt-e valaha a Marson olyan környezet, amely megfelelő lehetett volna a mikrobiális létformák számára. A kutatási program elején a jármű kémiai és ásványi bizonyítékokat gyűjt majd az egykor élhető környezetű Marssal kapcsolatban. Ha ezeket megtalálta, akkor a kutatás második szakaszában a cél majd annak az időszaknak a meghatározása lesz, amikor a Mars élhető környezet lehetett. Emellett a marsi légkör és geológia minél részletesebb megismerése is fontos cél volt. Mindezeken túl pedig a Mars Science Laboratory technológiai próbának is minősült és a jövőbeni emberekkel történő marsi expedíciókat fogadó körülmények felderítése is a feladatai közé tartozott. Mindezek a feladatok egy újfajta rovert igényeltek. Szerkezeti felépítését tekintve az új jármű is a Sojourner, Athena, Spirit, Opportunity által lefektetett családfához tartozott, de mint ahogy a MER roverek is hatalmas ugrást képviseltek a Sojourner-hez képest, úgy az MSL rover is egy új lépcsőt jelentett a fejlődésben.

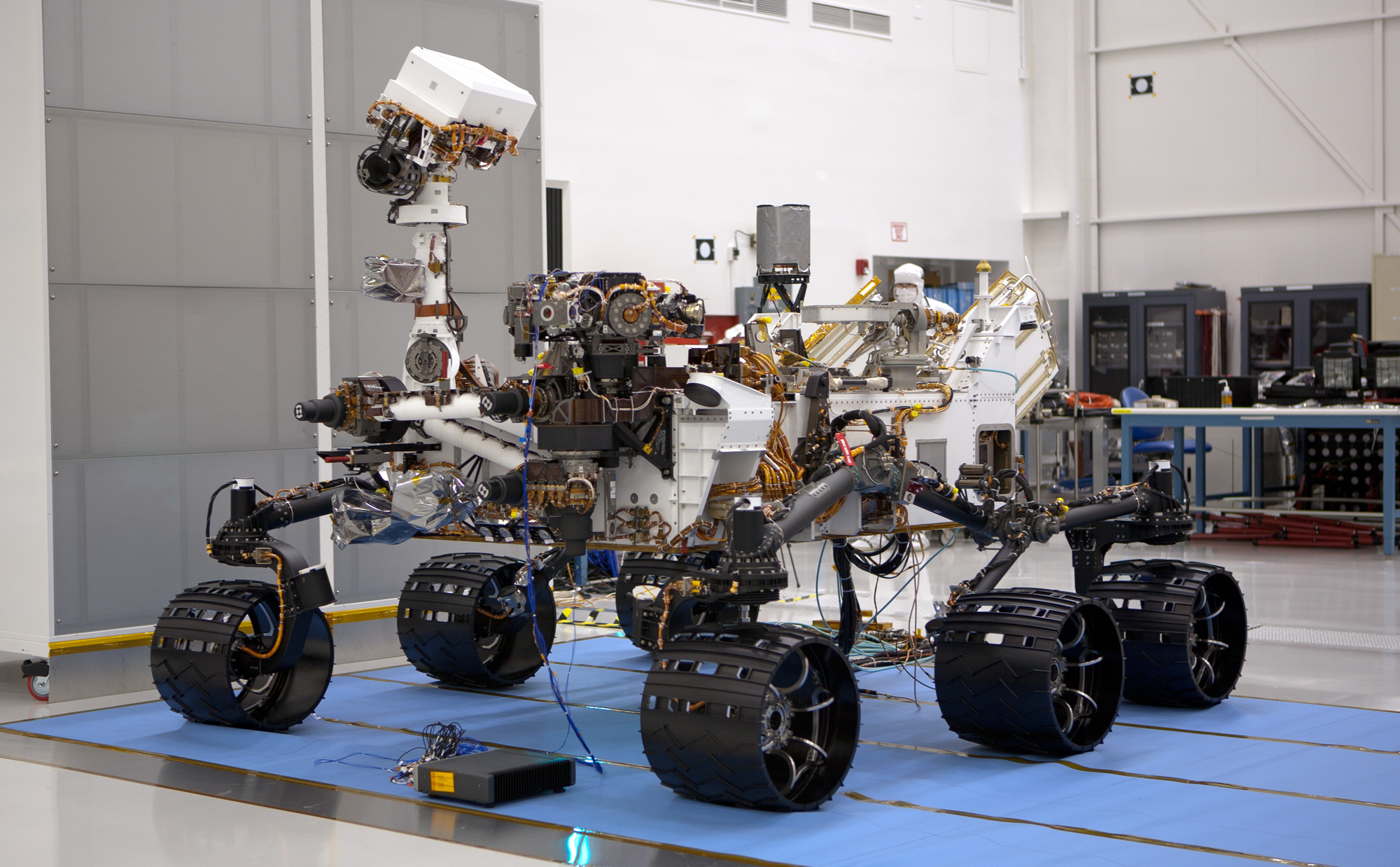
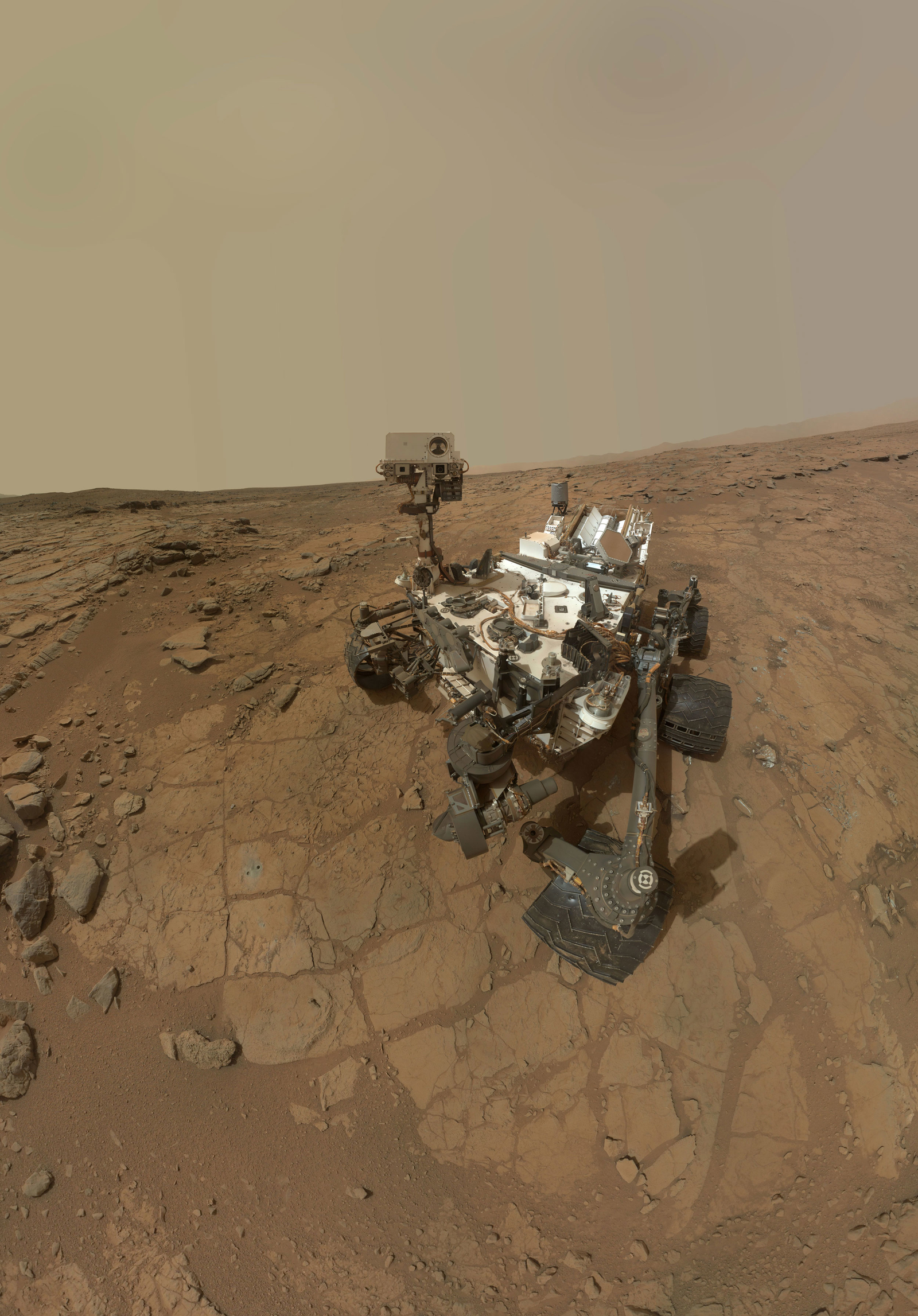
A Curiosity a JPL Spacecraft Assembly Facility nevű szerelő üzemében 2011 áprilisában.
Forrás: NASA Mars Exploration Program

Oldaról készült képen jól láthatóak a jármű méretei, a masszív robotkar elöl, a kameraállvány a jármű tetején, az elődeihez képest
hatalmas kerekek és futómű, valamint az MMRTG nevű radioizotópos energiaforrás a jármű végében ferdén elhelyezve.
Forrás: NASA Mars Exploration Program
A hasonlóságokat nézve először az új NASA rover is hatkerekű, rocker-bogie felfüggesztéssel rendelkező jármű lett, amelynek testét a Warm Electronics Box nevű doboz és az azon elhelyezkedő Rover Equipment Deck nevű felület alkotja. A Warm Electronics Box (WEB) tartalmazza a jármű vezérlő számítógépeit, egyéb elektronikáját, akkumulátorait és a tudományos műszerek egy részét. A WEB biztosítja a belső berendezések számára a megfelelő hőmérsékletet, valamint a mechanikai behatásokkal és a porral szembeni védelmet. A WEB tetején lévő Rover Equipment Deck-hez (RED) kapcsolódik a kameraállvány és a kommunikációs antennák. A WEB megfelelő hőháztartását aktív fűtőelemek és passzív hőszigetelés biztosítja csak úgy, mint elődeinél. A két vezérlő számítógépet egy-egy BAE RAD 750 típusú, kozmikus sugárzás hatása ellen megerősített processzorral látták el, amik 200 megahertz sebességgel dolgoznak. Egyszerre csak az egyikük működik, a másik pedig tartalékként szolgál. A számítógépek a Rover Compute Element (RCE) nevű modulban kaptak helyet, ami egy bus rendszeren keresztül csatlakozik a többi elektronikus berendezéshez. A járművet 2 gigabyte flash memóriával, 256 megabyte dinamikus RAM-mal és 256 kilobyte EEPROM-mal látták el. A flash memória a jármű leállításakor is képes tovább tárolni az adatokat. A vezérlő számítógép felel a hőháztartás, az öndiagnosztika, az energiaháztartás, a kommunikáció napi szintű menedzseléséért és a Földről érkező utasítások végrehajtásáért. Az Inertial Measurement Unit (IMU) nevű egység dőlési információkat biztosít a jármű mindhárom, x, y és z tengelyére vonatkozóan. Az MSL rover futóműve hasonló kialakítású lett, mint a Sojourner-e, a Spirit-é és az Opportunity-é; hat kerék rocker-bogie típusú felfüggesztéssel. Mind a hat kerék egyénileg hajtott a kerékagyakba épített elektromos motorok segítségével. Az első és hátsó kerekek függetlenül kormányozhatók, így a jármű egyhelyben is meg tud fordulni. Középen egy kiegyenlítő kar szabályozza a járműtest dőlését, a két ellenoldali felfüggesztést mindig azonos mértékben, de ellentétes irányban téríti ki, így felezi a WEB dőlésének mértékét. Ez a megoldás lehetővé teszi, hogy a kerekek átmérőjénél nagyobb akadályokon is átgördüljön a jármű. A kerekek 50,8 cm átmérőjűek és 40 cm szélesek. Egyenként egy darab alumínium tömbből vannak kimunkálva. Felületükön a haladási irányra merőlegesen 15 °-ként 7,5 mm magas cikcakkos bordák vannak kialakítva a tapadás növelése érdekében. A kereket a kerékaggyal 6 darab titánból készült küllő kapcsolja össze, ezek biztosítják a kerék rugózását is. A kerekek felülete 0,75 cm vastag, a szélesség egyharmadánál dupla hosszanti borda erősíti őket, ide kapcsolódnak a küllők. A kerekek külső felületébe kialakítottak három lyuksorozatot, ami a JPL morzekódját rajzolja ki a keréknyomba. A jármű képes megmászni a 45°-os emelkedőket is, de biztonsági megfontolásból a repülési szoftver csak 30°-ig engedi a fel-, illetve lemászást. Emellett a jármű képes elhaladni a 65 cm magas sziklák és kövek fölött is és képes ugyanekkora szélességű árkokat is áthidalni. A rover maximális sebessége pedig 4 cm/s. Az új rover a MER-ekhez hasonlóan szintén rendelkezik egy körbeforgatható kameraállvánnyal és egy elöl elhelyezett több-szabadságfokú robotkarral. A kameraállvány a talajtól számítva 2,2 méter magasságig nyúlik föl, tetején egy 360°-ban körbeforgatható tartóban helyezték el a két darab navigációs kamerát (Navcams) és a Mastcam nevű sztereó kamerapárt. A kinyújtott robotkar 2,2 méter hosszú. Három csuklóval rendelkezik, a végén lévő toronyban pedig öt tudományos műszert helyeztek el: egy APXS spektrométert, egy MAHLI nevű képalkotót, egy CHIMRA nevű anyagvizsgáló berendezést, egy fúróberendezést és egy DRT nevű poreltávolítót. A hasonlóságok ezzel azonban be is fejeződtek. Az MSL rover méretei jóval meghaladják az elődei méreteit. Az új jármű 3 m hosszú, 2,7 méter széles és 2,2 méter magas lett, tehát nagyjából egy kisméretű személygépjármű méreteivel rendelkezik. A tömege pedig 899 kg lett. A Spirit és Opportunity esetében idővel sok gondot okozott a napelemeket mindjobban beborító por, amely jelentősen rontotta azok hatékonyságát, nagyban behatárolva és korlátozva a Spirit és az Opportunity lehetőségeit. Az új járműbe ezért egy teljesen új energiaforrást terveztek. A jármű menetirány szerinti végében elhelyezett Multi-Mission Radioisotope Thermoelectric Generator (MMRTG) nevű henger alakú energiaforrás 4,8 kg-nyi 238-as plutónium izotópot tartalmaz és 110 W teljesítményű. A plutónium üzemanyagú radioizotópos energiaforrás minden időben egyenletesen biztosítja a rover működéséhez szükséges energiát. Tervezett élettartama 14 év. A hengerhez 8 db hűtőborda csatlakozik. Az energiaforrás által megtermelt áramot két darab lítium ion újratölthető akkumulátor tárolja. Ha a fogyasztás meghaladja az energiaforrás teljesítményét az akkumulátorokból fedezik a többletigényt. A plutónium veszélyes volta miatt az üzemanyagot kerámia formájában helyezték el, ami nem engedi kikerülni az izotópokat a szabadba egy esetleges indítási baleset esetén sem. Az MMRTG az Egyesült Államok Energia Minisztériumának fejlesztése.
Az MSL feladatainak elvégzéséhez igen széleskörű tudományos eszközparkot kapott, amelynek elemei sokkal részletesebb vizsgálatokat tesznek lehetővé a Mars felszínén és légkörében, mint az előző missziók műszerei. Képalkotó műszerek a Mastcam, a MAHLI és MARDI. A Mastcam kamerapár színes panoráma fényképfelvételek és videók készítésére alkalmas. A kamerapár feladata a környezet topográfiájának, geomorfológiájának és geológiájának, a sziklák és sziklakibúvások morfológiájának, szerkezetének, az időjárás hatásainak, a porszerű és szemcsés anyagok fizikai-mechanikai, ásványtani tulajdonságainak és lerakodásának megfigyelése és dokumentálása. Illetve az esetlegesen előforduló jég és fagy keletkezésének, szerkezetének és jellemzőinek megfigyelése. Továbbá a légköri és meteorológiai jelenségek, felhők, porviharok és porördögök dokumentálása. Emellett a kamerapár a rover navigációját, a mintavétel folyamatát és a további műszerek munkáját is segíti. A két kamera a rover kameraállványán a talajtól mérve 1,97 méter magasban, egymástól pedig 24,5 centiméterre helyezkedik el. A Mastcam-ot a Kalifornia államban lévő san diegoi Malin Space Systems alkotta meg Mike Malin vezetésével. Az eredeti tervekben két azonos, 6,5-100 mm között variálható fókusztávolságú kamera szerepelt, 2007 szeptemberében azonban a NASA úgy döntött, hogy fix fókusztávolságú kamerákat fognak használni. A két kamera eltérő fókusztávolságúnak lett legyártva. Az egyik kamera 34 mm-es fókusztávolsággal és 15°-os látószöggel, a másik pedig 100 mm fókusztávolsággal és 5,1°-os látószöggel rendelkezik. Mindkettő esetében 2,1 méter a legkisebb távolság, amire még képes ráfokuszálni. A kamerák 1600 x 1200 pixel felbontású képeket készítenek, valamint képesek 10 fps felbontású videók rögzítésére. A Mastcam rendszernek külön képfeldolgozó szoftvere van, ami függetlenül működik a rover vezérlő számítógépétől. Mindkét kamera egy-egy 8 gigabyte-os belső memóriával rendelkezik, amelyek 5500 nyers (raw) formátumú kép tárolására alkalmasak. A kamerák képesek az elkészített képek JPEG formátumú tömörítésére és tárolására is, ennek ellenére a képeket általában raw formátumban tárolják és csak a Földre való továbbítás előtt tömörítik őket. 14 különböző szűrő segíti a tudományos vizsgálatokat. 5-8 másodperc kell egy szűrő kicseréléshez. A Mars Hand Lens Imager (MAHLI) egy színes mikroszkopikus képalkotó eszköz. Feladata a sziklák és a talaj mikroszkopikus szintű ásványtani és szerkezeti megfigyelése. A robotkar tornyában helyezkedik el, 1600 x 1200 pixel felbontású képeket képes készíteni. Emellett képes 720 p HD videó készítésére is. Látószöge 34 és 39,4 ° között változtatható. 8 gigabyte flash memóriával és 128 megabyte SDRAM-mal rendelkezik. A MAHLI fehér színű LED és UV (365 nm) világítással is fel van szerelve, így éjszaka is képes felvételeket készíteni. A műszernek továbbá van két tapintó szenzorja, amelyek megállítják a robotkar mozgását, amikor a műszer már elég közel van a vizsgálandó tárgyhoz, így segítik a képalkotó megfelelő elhelyezését a vizsgálat közben. A MAHLI-t szintén Malin Space Systems csapata fejlesztette ki Kenneth Edgett vezetésével. A Mars Descent Imager, azaz MARDI kamera a leszállás során színes videót készít az ereszkedő jármű alatti területről. A MARDI leszállás során érzékeli az oldalirányú mozgásokat és segíti ezek korrekcióját. Emellett megfigyeli a geológiai képződményeket a leszálló területén, illetve az uralkodó szélirányt. A videót az irányító központ munkatársai a jármű útvonalának megtervezésénél is fölhasználják, emellett precízen meghatározható vele a jármű helyzete. A jármű elején, baloldalon, alul helyezkedik el a lefelé néző fix fókusztávolságú színes kamera, ami 1600 x 1200 pixel felbontással rendelkezik. A MARDI a hő pajzs leválása után lép működésbe és 4 kép/másodperc gyakorisággal készít képeket egészen a sikeres talajérésig, amikből egy nagyfelbontású videót állít össze. Az elkészült videót a kamera 8 gigabyte méretű flash memóriájában tárolja és a Curiosity leszállása után kerül visszaküldésre a Földre. A MARDI is a Malin Space Systems alkotása, kifejlesztése Mike Malin vezetésével történt. 2007-ben a műszert a NASA kivette a rover műszerparkjából, de később megengedték a Malin Space Systems-nek, hogy saját forrásait használva befejezze azt, így visszakerülhetett a Curiosity-be.
A képalkotók mellett a rover négyféle spektrométerrel felszerelt berendezést is vitt magával, ezek az APXS, a ChemCam, a CheMin és a SAM nevű műszerek. A Sojourner, a Spirit és az Opportunity után a Curiosity-t is felszerelték egy Alfa-proton röntgen spektrométerrel (Alpha Particle X-Ray Spectrometer, APXS). A műszer a robotkar végén lévő toronyban helyezkedik el, feladat pedig a marsi sziklák és talaj kémiai elemzése. Az APXS nappal és éjszakai is képes méréseket végezni. Egy vizsgálat átlagosan 2-3 óráig tart, de akár egy 10 perces vizsgálat is elegendő lehet a főbb elemek kimutatásához. A spektrométer a kémiai elemek összetételét érzékeli a sziklákban és a talajban. A műszer által kibocsátott alfa-részecske- (hélium atommagok, két proton és két neutron) és a röntgensugárzás a sziklákba és a talajba hatolva az anyagban lévő atomok elektronjait magasabb energiájú pályára lökik, ahonnan az elektronok energia kibocsátással jutna vissza eredeti helyükre. Ez a kibocsátott elektromágneses sugárzás szintén a röntgensugarak osztályába tartozik, energiájából pedig megállapítható a minta kémiai összetétele. A műszert a kanadai Guelph Egyetem munkatársai fejlesztették ki Ralf Gellert irányításával. A ChemCam egy LIBS (Laser-induced breakdown spectroscopy) lézerből, egy teleszkópból, egy képalkotóból és három spektrométerből álló műszer, amely a sziklák és a marsi talaj kémiai összetételét képes megállapítani. A lézernyaláb energiasűrűsége több mint 10 MW/mm2, energiája 14 MJ és 5 nanoszekundumos impulzust bocsát ki. A lézernyalábot 7 méter távolságról a célpontra lőve az plazmává hevíti a vizsgálandó minta anyagát. A plazma fénye a 110 mm átmérőjű teleszkóp gyűjti össze. A teleszkópból egy optikai kábelen keresztül jut el a fény a három spektrométerhez. A plazma spektroszkópiai elemzése pedig megállapítja a mintát alkotó kémiai elemeket. A három spektroszkóp 240 - 850 nm tartományban érzékel 0,09 - 0,3 nm felbontással és 6144 csatornával. A műszer 1024 x 1024 pixeles Remote Micro-Imager (RMI) CCD kamerája pedig a teleszkópon keresztül képes felvételeket készíteni a célpontról. A lézernyalábot, a teleszkópot és a képalkotót a rover kameraállványán, míg a spektrométereket a WEB-en belül helyezték el. A ChemCam lézerével képes letisztítani a port a sziklák felületéről és vizuális segítséget nyújtani a sziklákon végzett fúrási műveletekhez. A ChemCam-et az új-mexikói Los Alamos Nemzeti Laboratórium csapata Rogers Wiens vezetésével és a francia Centre d'Etude Spatiale des Rayonnements (CESR) csapat Sylvestre Maurice vezetésével közösen fejlesztette ki. A projektben részt vett a JPL, az Ocean Optics Inc. és a francia Commissariat a l'Energie Atomique (CEA) is. A műszer kalibrálásához a roveren kalibrációs anyagmintákat helyeztek el. A ChemCam-et 50-50 % üzemelteti az Egyesült Államok és Franciaország. A kémiai és ásványtani műszer, a Chemistry and Mineralogy instrument, röviden CheMin kémiai analízist végez a porrá őrölt mintákon. A műszer a WEB-en belül a jármű elején helyezkedik el. A CheMin-be a robotkar fúrójából vagy a mintavevő kanálból jutnak az anyagminták. A műszer egy hajszálvékony röntgensugár nyalábot bocsát ki a mintára. A röntgensugarakat elnyelő atomok fluoreszencia formájában bocsátják ki az elnyelt energia egy részét. Ezt a kibocsátott energiát vizsgálva megállapíthatóak a mintában lévő atomok. Másik vizsgálati mód a röntgen diffrakció, amelynek lényege, hogy minden elem másként téríti el a röntgensugarakat, ezeknek az eltérített sugaraknak a szögét mérve pedig megállapítható az adott elem típusa. Mindkét esetben egy CCD érzékelő be érkezik vissza a keletkező/visszavert sugárzás. Egy CheMin mérést 10 óráig is eltart. A műszert a NASA kaliforniai Ames Kutatóközpontjának csapata készítette Thomas Bristow vezetésével. A Sample Analysis at Mars (SAM) műszer a robotkar által összegyűjtött anyagmintákat vizsgálja meg szerves anyagok és szénalapú molekulák nyomai után kutatva. A műszer három alrendszerből áll, a Quadrupole Mass Spectrometer (QMS) tömeg spektrométerből, a Gas Chromatograph (GC) gáz kromatográfból és a Tunable Laser Spectrometer (TLS) lézer spektrométerből. A műszer feladata a szénvegyületek utáni kutatás, a vegyületek létrejöttének és felbomlásának vizsgálata, metán és szerves vegyületek utáni kutatás és az élet szempontjából fontos elemek - nitrogén, hidrogén, oxigén, kén - kémiai és izotópos állapotának felderítése, továbbá a légkör és a talaj egymásra hatásának meghatározása. SMS nevű mintamozgató rendszer, amely csőhálózatból, szelepekből, fűtőkből áll segíti a három fenti alrendszer munkáját. A műszer a WEB-en belül a rover elején helyezkedik el, nyílása a WEB tetején van. A gáz halmazállapotú minták a légkörből egyből bekerülnek a csőhálózatba. A szilárd halmazállapotú minták feldolgozása egy olvasztókemencében történik, ami 1000 °C-ra hevíti fel a szikla- és talaj részeket. Az elgőzölgő minták a csőhálózaton keresztül jutnak el a megfelelő helyre. A QMS a tömeg alapján választja szét a gázkomponenseket további meghatározásra és elemzésre. A GC a gázkomponenseket tovább bontja molekulákra. A TLS pedig megállapítja ezen molekulákat alkotó elemek típusát és mennyiségét. A SAM műszert a NASA Maryland állambeli Goddard Űrközpontjának csapata fejlesztette ki Paul Mahaffy vezetésével.
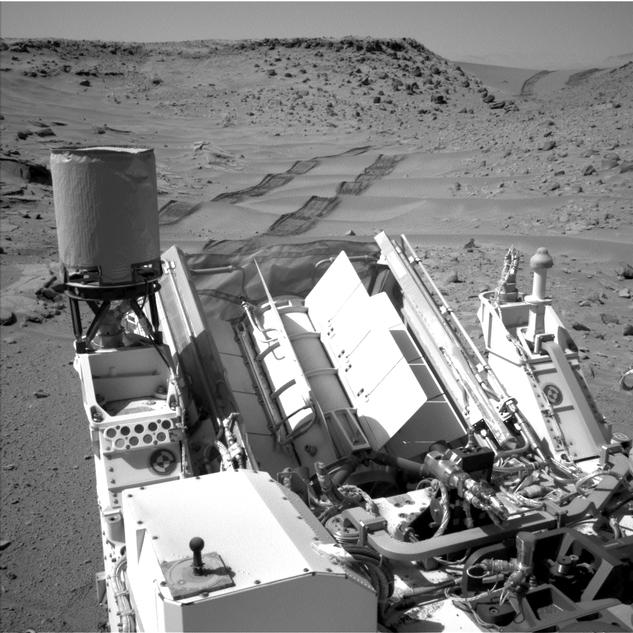
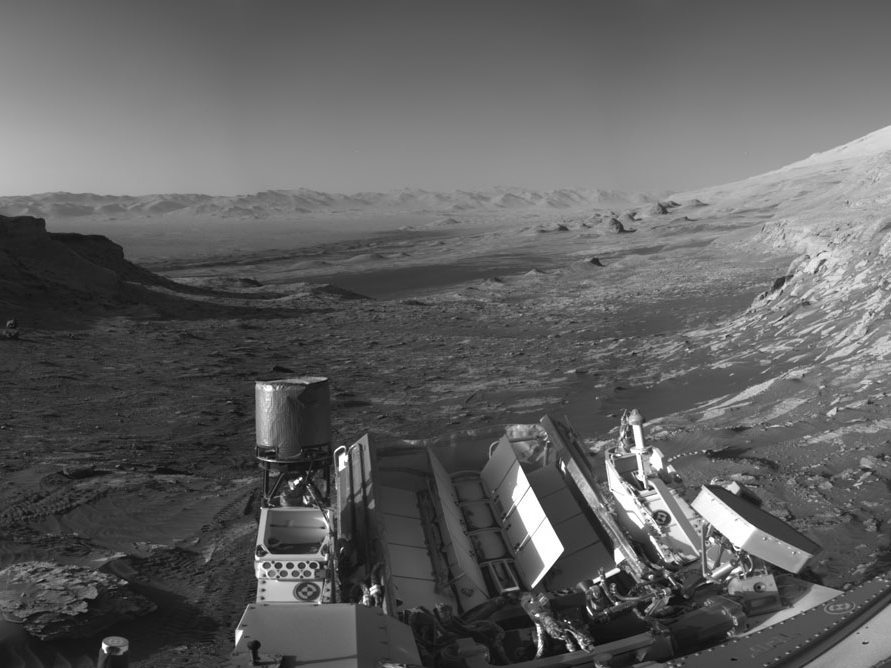
A már a Mars felszínén készült képen az MMRTG nevű plutónium üzemanyagú radioizotópos energiaforrás látható a hűtőbordáival
körülvéve. Az 4,8 kg-nyi 238-as plutónium izotópot tartalmaz 110 W teljesítményű energiaforrás 14 éven keresztül minden időben
egyenletesen biztosítja a rover működéséhez szükséges energiát.
Forrás: NASA Mars Exploration Program

Az MMRTG-t egy védő konténerben emelik fel a floridai Kennedy Űrközpont 41-es indítóhelyen álló hordozórakétához 2011. november 7-én.
Forrás: NASA Mars Exploration Program
A fenti műszerek mellett a jármű két sugárzásdetektort is visz magával, a RAD-ot és a DAN-t. A Radiation Assessment Detector, röviden RAD a Napból és a világűrből érkező kozmikus sugárzást méri a Marsig tartó út során, a Mars légkörében és annak felszínén. A műszer a Curiosity RED nevű tetején a futómű kiegyenlítőműje előtt helyezkedik el. A RAD mérései nagyon fontosak a későbbi emberekkel tervezett marsexpedíciók szempontjából, főleg a sugárzás ellen védelmet nyújtó burkolatok vastagságának meghatározásához. Emellett a műszer segít megérteni hogyan hat a sugárzás a marsi sziklák és talaj kémiai és izotóp koncentrációjára. A műszer a töltött részecskék teljes spektrumát vizsgálja, a kozmikus sugárzástól, a napszél töltött részecskéin át a marsi légkör és talaj által kibocsátott másodlagos sugárzásig. Minden órában 15 percen keresztül mér. Egy töltött részecske teleszkópból, három detektorból és egy cézium jodid kaloriméterből áll. Ahogy a részecskék áthaladnak a detektorokon, lelassulnak és elektron vagy fény formájában energiát adnak le, amelynek mértékéből megállapítható a fajtájuk. A RAD neutron-, proton-, gamma-, alfarészecske és nehéz ionok által kibocsátott sugárzást is képes észlelni. A műszert Donald Hassler vezetésével a Colorado állambeli Boulder városban lévő Southwest Research Institute munkatársai fejlesztették ki. A Dynamic Albedo of Neutrons, azaz DAN nevű aktív/passzív neutron spektrométer a RAD mellett helyezkedik el. Segítségével meghatározható a marsi talajban lévő hidrogén és hidroxid ionok mennyisége, melyekből következtetni lehet kötött állapotban lévő a víz mennyiségére. Egy méter mélységig képes vizsgálni a talajt és 0,1 %-ig képes észlelni a kötött víz mennyiségét. A víz jobban lelassitja a szabad neutronokat mint más anyagok. A DAN által a talajba sugárzot, majd onnan visszavert neutron nyalábban lévő lassabb neutronok arányából állapítja meg a műszer a kötött víz mennyiségét. A DAN-t az Roszkozmosz orosz űrügynökség moszkvai űrkutatási intézetének munkatársai készítették Igor Mitrofanov vezetésével.
A Collection and Handling for In-situ Rock Analysis (CHIMRA) elnevezésű műszer a robotkar végén lévő toronyban kapott helyet. Feladata a fúrófej és a mintavevő kanál által összegyűjtött minta osztályozása. A CHIMRA kamrákból és járatokból áll, a robotkar tornyába épített vibrációs eszköz segíti a minta szétválasztását és a megfelelő járatba juttatását. A CHIMRA két további műszerhez, a SAM és a CheMin műszerekhez továbbítja az előzetesen megfelelően szétosztott mintát. Nappal és éjszaka is képes működni. A fúró 1,6 cm átmérőjű és 5 cm mély lyukat tud fúrni a kiválasztott sziklába, a kifúrt mintát pedig a SAM és a CHIMRA műszerekbe juttatni. A fúró a szikla anyagát ütvefúrással porrá őrli, ezután ezt a port juttatja el a műszerekbe. Ha a fúrószár beragadna, akkor le lehet azt választani a toronyról. A jármű elején lévő dobozban két tartalék fúrószárat helyeztek el, amelyekkel pótolni lehet az esetlegesen beragadtat. A Dust Removal Tool (DRT) eszköz fémsörtés keféje képes eltávolítani a porréteget a kiválasztott szikláról, hogy a felületét is meg lehessen vizsgálni a többi műszerrel. A kameraállványon elhelyezett Rover Environmental Monitoring Station (REMS) meteorológiai vizsgáló állomás a marsi légkör nyomását, hőmérsékletét, páratartalmát, UV sugárzását és áramlási jellemzőit méri (szélsebesség és irány). A kameraállványon, a talajtól 1,5 m magasságban helyezkedik el két szenzor, amelyek a szélsebességet, a szélirányt és a légköri hőmérsékletet mérik. Ezen felül egyik a páratartalmat, másik a talaj menti hőmérsékletet is méri. 120°-os szöget zárnak be egymással, így egyikük mindig pontos szélsebességet mér. Egy UV szenzort helyeztek el a jármű hátulján, egy nyomásmérőt pedig a rover testén belül. A nyomásmérő egy csövön keresztül kapcsolódik a környezethez, amit porvédelemmel láttak el. A REMS minden órában legalább 5 percnyi adatot rögzít. A műszer együttest a spanyol Centro de Astrobiologia (CAB) és Consejo Superior de Investigaciones Cientificas - Instituto Nacional de Tecnica Aeroespacial (CSIC-INTA) intézetek közösen fejlesztették ki Javier Gomez-Elvira vezetésével. A Mars Science Laboratory Entry Descent and Landing Instrument, azaz MEDLI nevű műszer együttes a leszállás során a hőmérsékletet és a légköri nyomást méri. A műszer együttes a leszállóegység hő pajzsán került elhelyezésre. A Curiosity missziójához építették meg az addigi legnagyobb méretű hő pajzsot és a mérnökök szerették volna tudni, hogy hogyan teljesít, mennyire égnek el a pajzs egyes részei. A MEDLI információt nyújt a pajzs teljesítményéről és nagyjából 0,9 MB adatot küld vissza a Földre a leszállás során. A MEDLI-t a NASA Langley és Ames Kutatóközpontjai készítették Alan Little vezetésével. A Curiosity összesen 17 kamerát vitt magával, amelyeket feladatuk szerint a következő három csoportba sorolhatóak: mérnöki kamerák, tudományos kamerák és leszállást segítő kamerák. A járműre elhelyeztek négy pár veszélyelkerülő Hazard Avoidance Cameras (Hazcams), amelyek feladata az autonom navigáció és az akadályok elkerülése. A fekete-fehér 3D képeket készítő és fixen rögzített kamerák a jármű elején 68 cm-re, hátulján pedig 78 cm-re helyezkednek el a talajtól mérve. Elöl egy kamerapáron belül 16,6 cm távolság van a két kamera között, hátul pedig 10 cm. Mindegyik Hazcam 120°-os látószöggel rendelkezik, párokban dolgozva 3 méter távolságig alkotják meg a környezet 3D-s képét. Felbontásuk 1024 x 1024 pixel. Mindegyik kamerát egy-egy eldobható porvédő sapka védi a leszállás során felvert portól. A Navigation Cameras (Navcams) két pár kamerája a kameraállványon lett elhelyezve. Az 1024 x1024 pixel felbontású kamerák fekete-fehér 3D képeket készítenek. Feladatuk a navigáció és útvonaltervezés segítése. A kamerák 45°-os látószöggel rendelkeznek, 42 cm-re vannak elhelyezve egymástól és a jármű előtt lefelé néznek. A tudományos kamera csoportjába a már említett Mastcam, ChemCam és MAHLI műszerek kamerái tartoznak, a leszállást segítő kamera pedig a MARDI műszerben van elhelyezve.
Az MSL rover a Spirit-hez és az Opportunity-hez hasonlóan a 2006-ban pályára állt Mars Reconnaissance Orbiter (MRO) űrszondán keresztül kommunikál majd a Földel. Az MRO mellett a 2002-ben pályára állt Mars Odyssey űrszonda, mint tartalék átjátszó állomás vesz részt a misszióban. A rovert háromféle kommunikációs antennával szerelték fel, mindhárom a RED-en helyezkedik el. Az UHF antennával a rover a Mars Reconnaissance Orbiter és a Mars Odyssey űrszondákon keresztül a Földdel tud kommunikálni 400 MHz-es frekvenciával és 2megabit/s adattovábbítási sebességgel. Az X-sávú nagynyereségű antenna fogadja a Földről érkező parancsokat. A 30 cm átmérőjű hatszögletű antenna körbeforgatható, 160 bit/s sebességgel képes kommunikálni a Deep Space Network hálózat 34 méter átmérőjű antennáival és 800 bit/s sebességgel a hálózat 70 m átmérőjű antennáival. Az X-sávú kisnyereségű körbeforgatható antenna alacsony átviteli sebességű adatokat fogad 7-8 GHz frekvencián. Az előző rovereknél alkalmazott ballonos leszállási módszer egy ilyen nagytömegű és nagyméretű rover esetében már nem volt biztonságos, ezért az MSL felszínre juttatásához új műszaki megoldás kellett kitalálni. A JPL ezért előállt az Égi daru ötletével, egy olyan leszálló fokozattal, ami felülről kapcsolódik a roverhez. Az Égi daru nyolc fékezőhajtóművel és egy kábelrendszerrel rendelkezik. A leszállás során a légkörön való áthaladás után kinyílik az ejtőernyő és leválik a hő pajzs. Majd miután megfelelő sebességre lassult az leszállóegység leválik az áramvonalas burkolat az ejtőernyővel együtt. Ezután az Égi daru fékezőhajtóművei veszik át a fékezés szerepét és a felszín fölött nagyjából 20 méter magasságig fokozatosan lassítják a rover zuhanását, majd 20 méter magasan lebegésbe váltanak át. Ekkor kábeleken keresztül az Égi daru leengedi a rovert a talajra, a tervek szerint maximum 0,75 m/s függőleges és 0,5 m/s vízszintes sebességgel. A rover leérkezése után kioldják a leeresztő kábeleket és az Égi daru elrepül a rover fölül egy biztonságosabb távolságra, ahol becsapódik marsi felszínbe. Az Égi daru navigálását az ereszkedés során a MARDI segíti. A rendszer 2 km magasságban kapcsol be és másodpercenként 4 képet rögzít, kijelöli azokat a potenciálisan veszélyes objektumokat, amiket az Égi darunak el kell kerülni és módosítja annak pályáját, ha szükséges. A rovert szállító űrszonda hasonlóan az előző missziókhoz egy utazó fokozatból (cruise stage) és a rovert, az Égi darut, a hővédő pajzsot, az áramvonalas burkolatot és az ejtőernyőt magába foglaló leszállófokozatból áll. A szállító űrszonda teljes tömege a roverrel együtt 3893 kg volt. A hagyománnyá vált névadó esszépályázat győztese, a 12 éves Clara Ma esszéje alapján a jármű neve Curiosity, azaz Kíváncsiság lett. A leszállás helyéül négy potenciális jelölt közül végül a Gale-kráterre esett a kijelölő csoport tagjainak választása. A Mars egyenlítőjéhez közel, az Elysium-síkság és a Cimmeria kontinens határán lévő 155 km átmérőjű kráter megfelelt a leszállással kapcsolatos minden előzetes biztonsági kritériumnak. Nem túl magasan elhelyezkedő terület, így az ejtőernyő számára elég sűrű a marsi légkör a biztonságos sebességre lassításhoz. Kicsi a lejtőszög és sziklákban szegény a felszín. Szélcsendes vidék, porban és homokban szegény. 60 foknál kisebb földrajzi szélességen fekszik, így nem kell tartani az északabbra télen kifagyó széndioxid berendezéseket károsító hatásától. Emellett a kráterről a korábbi mérések alapján azt feltételezték, hogy egy ősi tó lehetett évmilliárdokkal korábban. A Gael-kráter közepén egy 5 km magas, Aeolis Mons nevű hegy található. Ez egy lerakodott, igen vastag üledékes képződmény lepusztult maradványa. A krátermedence északi részén egy nagykiterjedésű, sötét színű homokdűne mező helyezkedik el, amit Bagnold Dunes-nek neveztek el. A Mars Reconnaissance Orbiter űrszonda adatai alapján a kráter és a hegycsúcs is tartalmaz üledékes kőzeteket. Valószínűleg egy tó helyezkedhetett el korábban a kráterben, az MRO felvételein kirajzolódott egy képződmény, ami egy folyó hordalékos deltatorkolatára emlékeztet. Az űrszonda anyag összetételi vizsgálatai szilikátokat, olivin-t, szulfátokat és agyagásványokat találtak a kráterben és a hegycsúcsot alkotót rétegekben. Az Aeolis Mons alsó régióiban a bolygó fiatalkorában keletkezett agyagos kőzetek lehetnek, magasabb rétegeiben pedig savas vizekből származó szulfátos üledékre számítottak a szakemberek. A tervek szerint a Curiosity a kráter pereméhez közel a fenéken landolna és azután innen kezdené meg útját a központi csúcs felé. Az Aeolis Mons oldalai az MRO felvételein eléggé lankásnak tűntek ahhoz, hogy a Curiosity akár a hegy legtetejéig is fel tud hatolni.

2011. november 26-án helyi idő szerint 10:02-kor a 41-es indítóállásban álló Atlas V-451 hordozórakéta útjára indítja
az akkori idők legnehezebb és legkomplexebb marsroverjét.
Forrás: NASA Mars Exploration Program
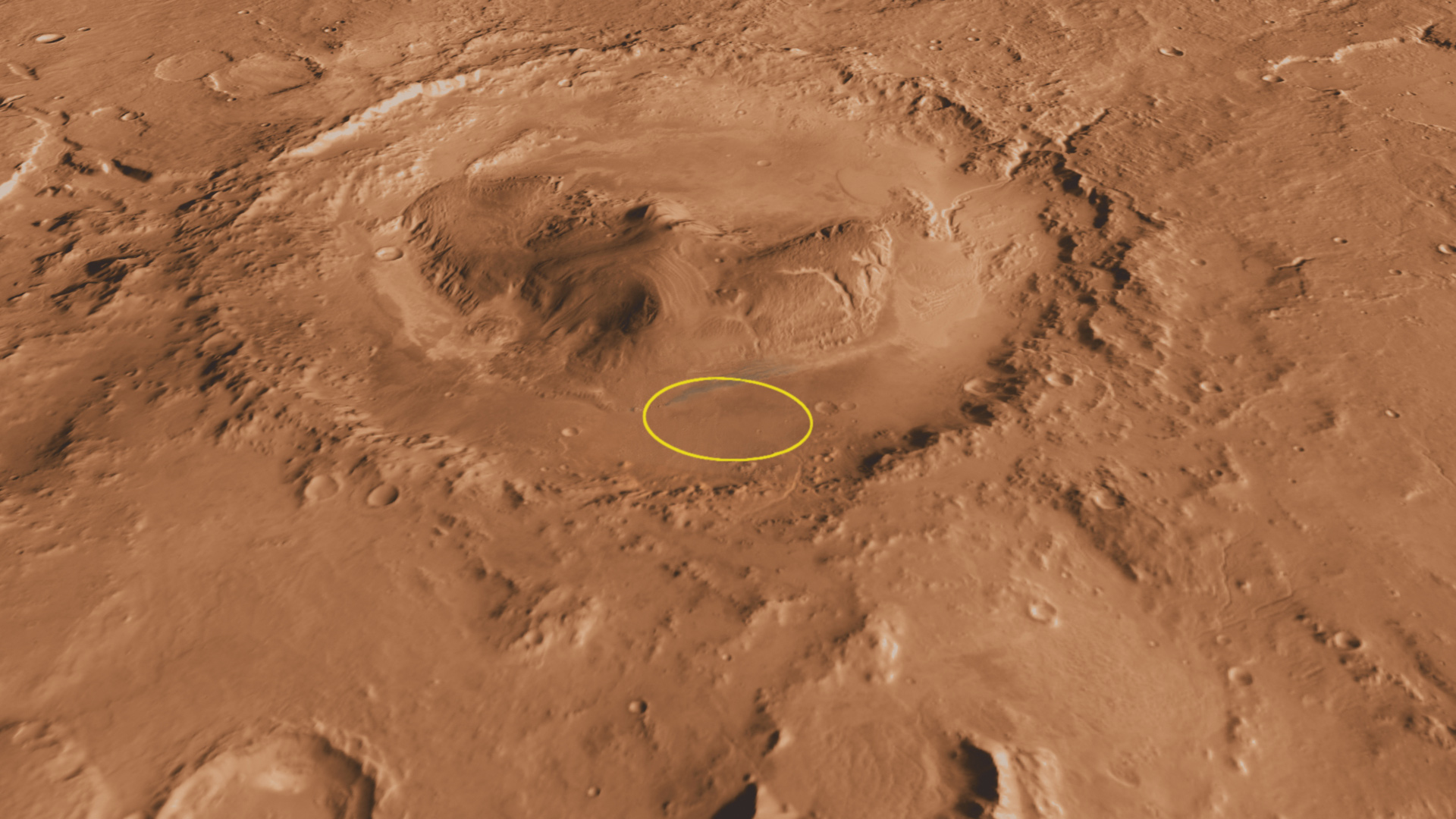
A Gale-kráter képe, ami a NASA Mars Odyssey űrszondájának felvételei alapján készült. Középen magasodik az Aeolis Mons nevű hegy.
A sárga ellipszis jelzi a Curiosity eredetileg tervezett leszállási zónáját.
Forrás: NASA Mars Exploration Program
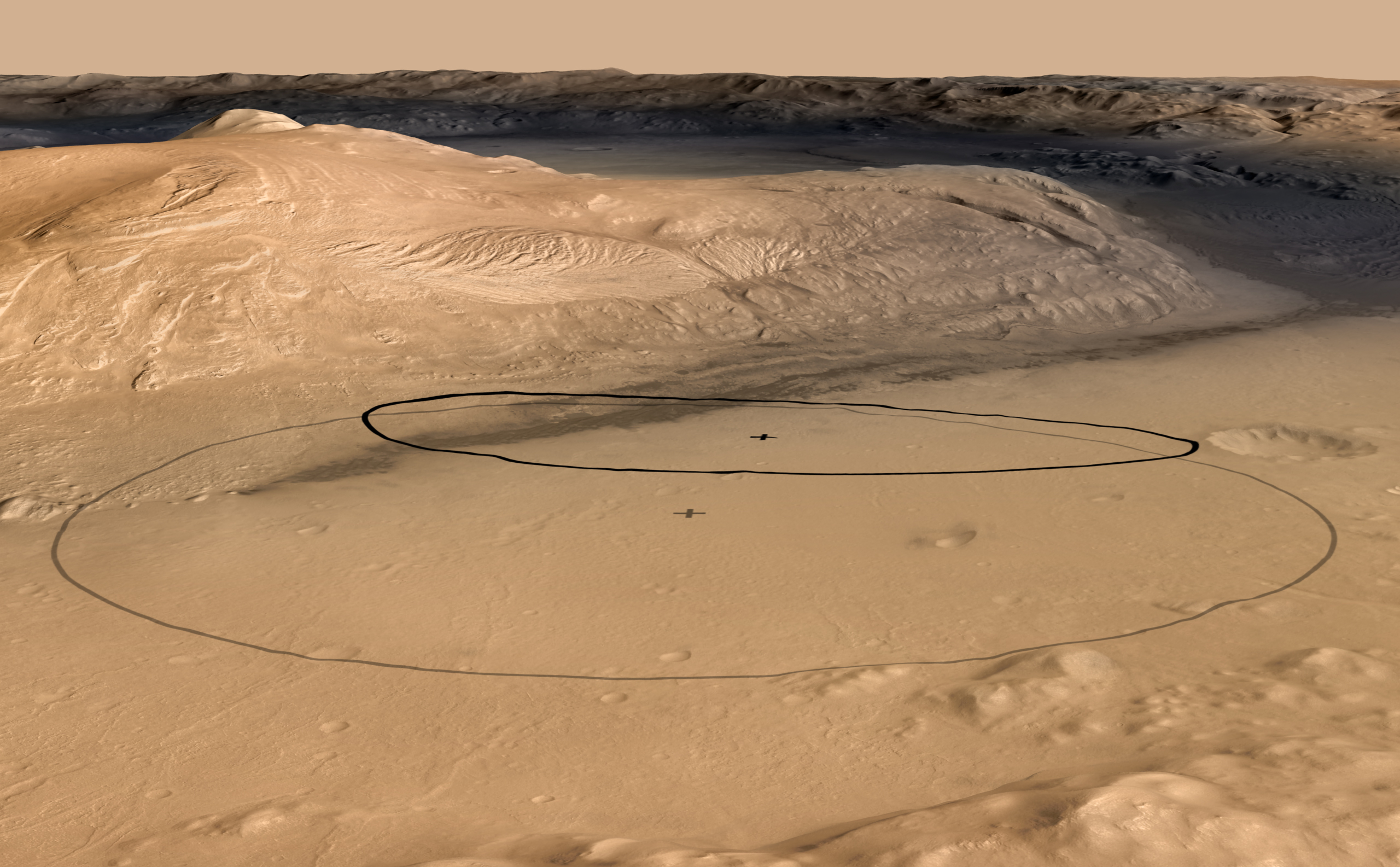
2012 júniusában az eredeti leszállási zónát egy kisebb 20 x 7 km méretű ellipszisre változtatták, amely közelebb helyezkedett el
az Aeolis Mons lábához.
Forrás: NASA Mars Exploration Program
A JPL csapatában a Curiosity programjának vezetője Richard Cook, a program vezetőtudósa pedig John Grotzinger volt. Jim Erickson és Steve Lee helyettes projektmenedzserként, Louise Jandura pedig a mintavevő rendszer vezetőtervezőjeként vett részt a projektben. Az MSL program körülbelül 2,5 milliárd dollárba került. A Curiosity tervezett élettartamát egy marsi évben, azaz 687 földi napban határozták meg. A rover fellövéséhez egy kétfokozatú Atlas V-541 hordozórakétát terveztek fölhasználni. Az 58 méter magas rakéta négy oldalsó szilárd gyorsító rakétával és egy Centaur típusú második fokozattal a Kennedy űrközpont LC41 nevű indítóállásából indul majd. Az elkészült rovert csakúgy, mint társait egy alapos tesztelésnek és ellenőrzésnek vetették alá a JPL pasadena-i telepén. Ezt követően a szállító űrszonda többi elemével együtt eljuttatták a floridai Kennedy Űrközpontba. Itt összeállították az űrszondát, és elvégezték a végső ellenőrzéseket. 2011. november 26-án eljött az indítás napja. 41-es indítóállásban álló Atlas V-451 helyi idő szerint 10:02-kor emelkedett fel tetején az akkori idők legnehezebb és legkomplexebb marsroverjével. Az Atlas utolsó fokozatát elhagyó űrszonda jeleit hamarosan észlelték az irányító központban, amik igazolták, hogy a Curiosity és a szállótó eszköze megfelelően működnek. Ezt követően megkezdődhetett a 9 hónapig tartó repülés a Marsig. A repülés alatt az irányító központ munkatársai folyamatosan ellenőrizték a rover és az űrszonda berendezéseit és pályáját, valamint teszteket és szimulációkat futattak le a leszállásra való felkészülésként. 45 nappal a Marsra érkezés előtt megkezdődött a leszállás előkészítése. 2012 júniusában az eredeti ellipszis alakú leszállási területet egy kisebb 20 x 7 km méretű ellipszisre változtatták, amely közelebb helyezkedik el az Aeolis Mons vagy, ahogy az irányító központ munkatársai időközben elnevezték, a Sharp-hegy lábához. Az elnevezésekkel kapcsolatban a végleges névadás a Nemzetközi Csillagászati Unió (IAU) hatásköre, de az irányító központ munkatársai a tájékozódás és a felszíni munka elősegítése miatt különböző nem-hivatalos elnevezésekkel illetik a különböző felszíni képződményeket. Augusztus 6-án a leszállóegység a felszíntől 125 km magasságban belépett a Mars légkörébe. A légkörbe lépéstől kezdődően a hő pajzzsal előrefelé száguldó leszállóegység körül egyre jobban felizzott a levegő. Az ionizációs szakaszt elhagyva kinyílt az ejtőernyő, majd levált a hő pajzs. Az ejtőernyő 322 km/h-ra lassította le a leszállóegységet, majd az áramvonalas burkolattal együtt levált, ezután pedig működésbe léptek az Égi daru fékezőhajtóművei. 20 méter magasságban a daru lebegésbe váltott és elkezdte leengedni a Curiosity-t a kábeleken keresztül. A rover felfüggesztése kinyílt és a kerekkel együtt rögzült az üzemi helyzetében. Végül a Curiosity 2012. augusztus 6-án világidő szerint hajnali 5:32-kor sikeresen elérte a Mars felszínét. 14 percbe telt, amíg a rover rádiójelei elérték a Földet. A sikeres leszállásról a Mars Odyssey űrszonda adott először hírt. A Curiosity az Aeolis Plaus nevű mélyföldön ért talajt. A leszálló helyet Bradbury-állomásnak nevezték el a 2012 júniusában elhunyt amerikai science fiction író, Ray Bradbury emlékére.
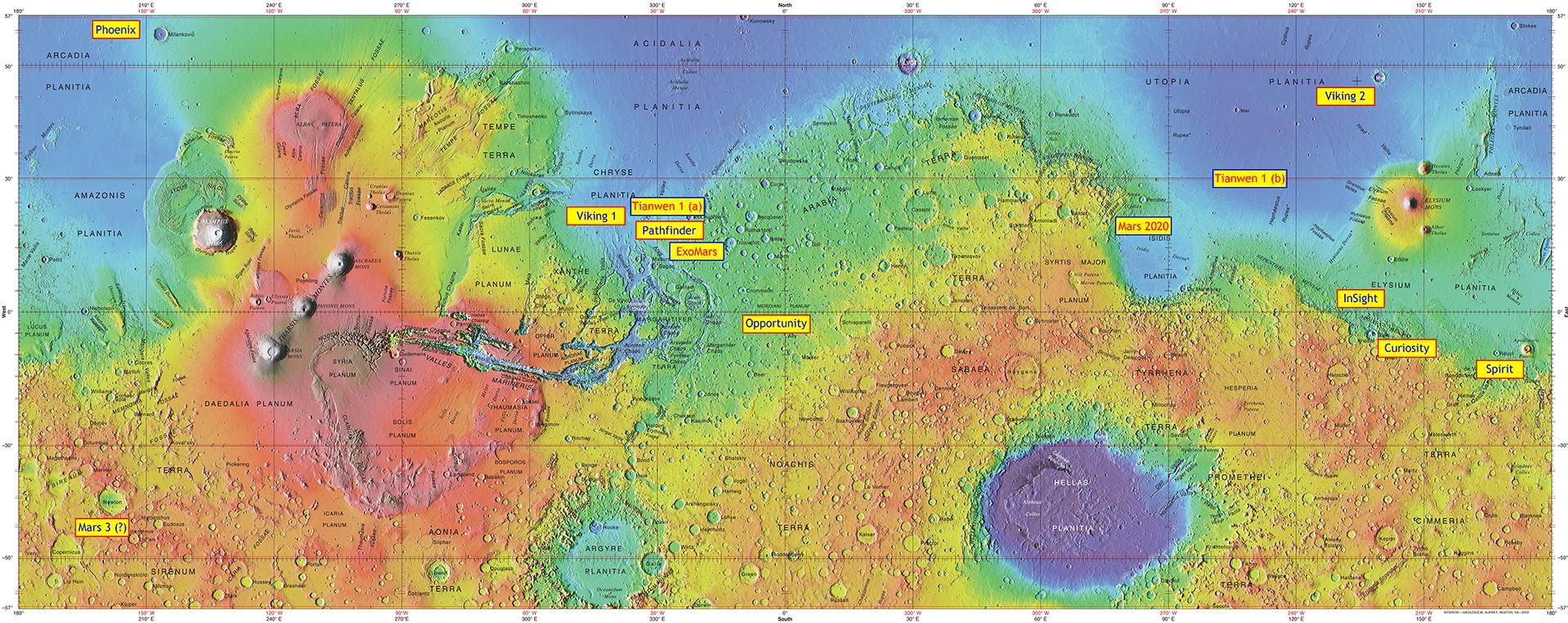
A Curiosity leszállóhelye a Mars magasság szerint színezett térképén, amely nem esett messze a Spirit rover és az InSight űrszonda
leszállóhelyeitől. (Külön lapon megnyitva a kép tovább nagyítható.)
Forrás: German Aerospace Center/NASA
A sikeres leszállást követően megkezdték a jármű beüzemelését. Kihajtották az antennákat és kommunikációs ellenőrzéseket végeztek. Ellenőrizték a környezeti hőmérsékletet, hogy az megfelelő-e a rover működéséhez, majd kihajtották a kameraállványt, ami eddig a WEB tetején feküdt és elkészítették az első képeket a környezetről. Megállapították a rover pontos helyzetét, az MRO felvételei és az űrszondával való kommunikáció rádiójeleinek segítségével. Augusztus 6-tól kezdve heteken keresztül tesztelték a rover belső rendszereit, műszereit, a robotkar működését, a navigációs és irányító rendszert és végül a jármű mozgását. Mielőtt az első útra sor kerülhetett a szakembereknek meg kellett győződniük arról, hogy a Curiosity stabilan áll a kerekein és nincs semmilyen veszélyes akadály a rover alatt. Augusztus 22-én sor került a rover első mozgására, a Curiosity 4,5 m haladt előre, majd 120°-ot fordult és 2,5 métert tolatott. A sikeres próbát követően a 38. solon 32 m megtételével a Curiosity elindult az első célpontja, egy 400 - 450 méterre fekvő világosabb terület, a Glenelg felé. Útközben a rover három sziklakibúvásnál is megállt. Az első a Goulburn néhány méterre feküdt a leszállási ponttól, a másik kettő, a Link és a Hottah távolabb helyezkedett el. A Link sziklakibúvásnál is már észlelni lehetett az egykori folyóvízre utaló nyomokat, de a nagy felfedezés a következő területen várta a rovert. A 39. solon (szeptember 15.) a Hottah nevű sziklakibúvásnál a Curiosity egy ősi patakmederre utaló nyomokat fedezett fel. A sziklakibúvás a rétegei közé cementálódott lekerekített szélű gömbölyű köveket tartalmazott, amelyek arra utaltak, hogy a földi patakmedri kavicsokhoz hasonlóan hosszú úton keresztül szállította őket a folyóvíz. A patamederben a víz a kövek állapotából adódóan nagyjából 1,8 m/s-mal áramlott és szintje térdig vagy csípőig érhetett egykoron. Ez volt az első alkalom, hogy folyóvíz által szállított köveket találtak a Marson. A patak valószínűleg évezredeken keresztül folyt itt, amíg kialakította ezeket a köveket. A 41. solon sor került az első DAN neutron spektrométeres mérésre. Útközben a Glenelg felé a Curiosity a Peace-folyónak elnevezett területen lévő hordalékkúpnál érdekes, éles szélű köveket talált. Közülük egy piramis alakú, sima oldalakkal rendelkező követ közelebbről is megvizsgált a 45. és 48. sol között. A piramis alakú szikla - amelyet a 2012 augusztusában elhunyt NASA mérnökre emlékezve Jake Matijevic-kőnek neveztek el - oldalán fehér foltok találhatók. Ezeket a területeket megvizsgálva a ChemCam és az APXS műszerekkel kiderült, hogy a kőnek nagy a vas, nátrium, alumínium, szilícium és kálium, továbbá kicsi a magnézium, nikkel és cink tartalma. Emellett a sókat alkotó kén, klór és bróm elemek a talajhoz hasonló arányban fordultak elő benne. Ezek alapján a Jake Matijevic-kő magmás kőzetnek adódott, aminek eredete lehet kiömlési vulkanikus anyag is. A ChemCam-mal 14 pontban mérték a kő felszínét. A 45-1. mérési pontban sok volt a magnézium és vas, amiből olivinre következtettek. A 45-2. pont vasban és titánban gazdag volt, ami ilmenitre (ami egy fém-oxid) utalt. A 45-10. pont szilíciumban, alumíniumban, nátriumban és káliumban gazdagnak bizonyult, ami földpátra utalt. A 48-14. pont pedig nagy kalcium és közepes magnézium tartalmával piroxénre utalt.

A Goulburn sziklakibúvás, amit a leszállás során a fékezőhajtóművek sugara takart ki.
Forrás: NASA Mars Exploration Program

Ösi patakmeder a Hottah nevű helyen.
Forrás: NASA Mars Exploration Program
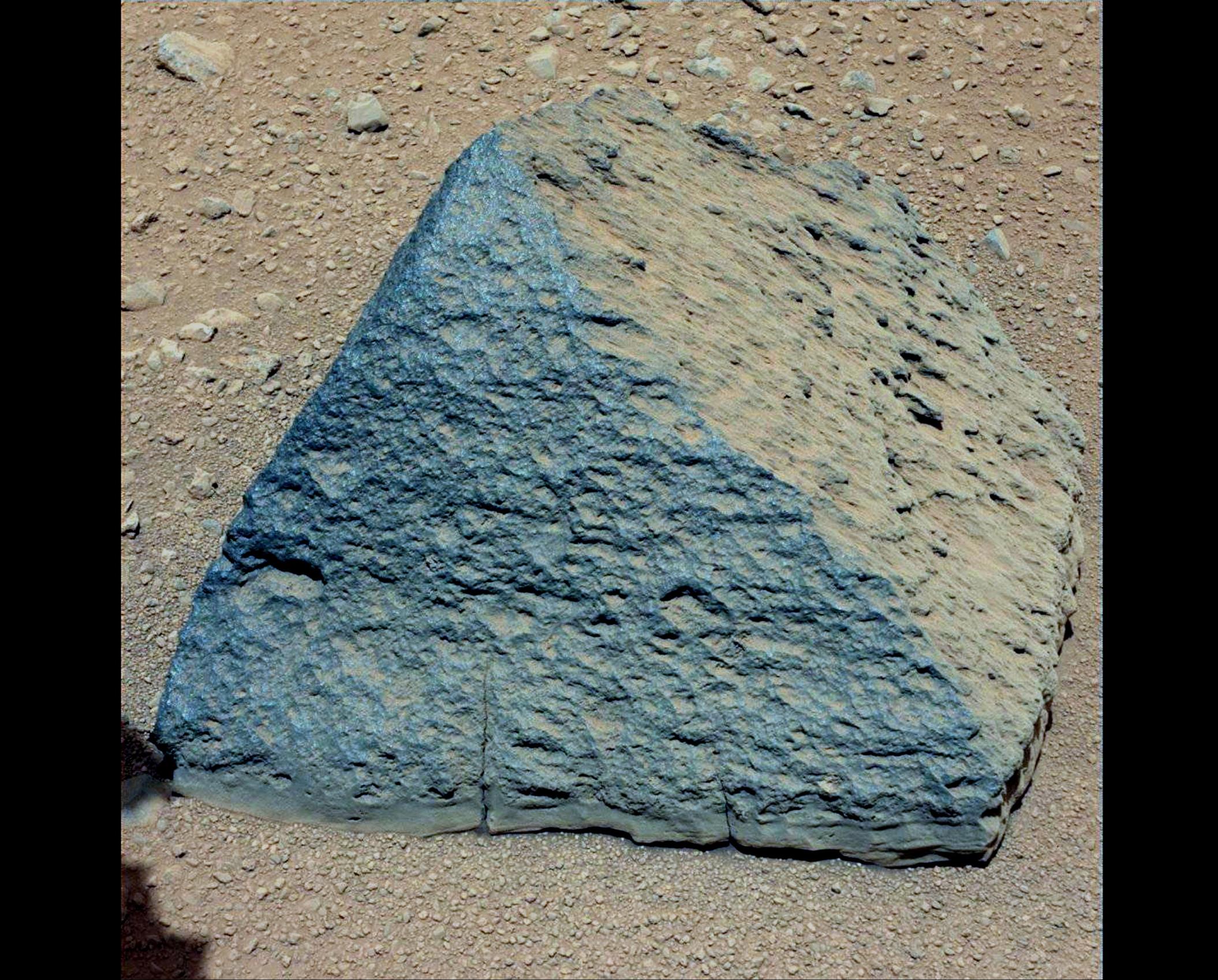
A Jake Matijevic-kő.
Forrás: NASA Mars Exploration Program
A Curiosity az 52. solon érte el a Rocknest nevű helyet, ahol fekete színű sziklákat talált. A rover több mint negyven solig maradt itt. Az 58. solon sor került az első kerék által végzett ásásra. A Curiosity bal első kerekét megforgatták, miközben a többi kereket befékezték, így a bal első kerék egy kis árkot ásott ki maga alatt. A következő napon a rover az APXS és a MAHLI műszerekkel megvizsgálta a kiásott árkot. Következő feladatként a 65. solon a jármű a robotkar elején található CHIMRA műszer együttessel mintákat vett az itt található homokból. Szintén bal első kerekével kissé föltúrta a talajt, hogy lássa mennyire laza, ezután a lapátra vett egy adag mintát, majd megrázta, hogy felszakadjanak az összetapadt szemcsék. Az így előkészített mintákat részben a CheMin műszer, részben pedig a SAM műszer fogadórészébe töltötte be. A homok összetételének vizsgálati eredménye tökéletesen megegyezett a 2009-es Spirit és Opportunity által analizált homokmintákkal. Legfontosabb alkotóelemek az alumínium-oxid, a kalcium-oxid, a magnézium-oxid, a kén-trioxid és a nikkel voltak. Emellett még kisebb százalékban nátrium-oxidot, vasoxidot és cinket is tartalmazott a minta. A SAM műszer két klóralapú szerves vegyületet, a klórmetánt és di-klórmetánt talált a Rocknest területén. Novemberben a Curiosity a beépített SAM spektrométer segítségével megmérte a légkörben lévő öt legfontosabb összetevő arányát. Az első SAM eredmények a 95. solon (2012. november 11.) érkeztek meg az irányító központba. A légkörnek közel 96 %-a szén-dioxidból, 2-2 %-a argonból, illetve nitrogénből, a maradék kevesebb mint 0,2 %-a pedig oxigénből és szén-monoxidból áll. A REMS környezetvizsgáló állomással végzett mérések alapján megállapították, hogy a napi légköri nyomásértékek 10 %-os ingadozást mutatnak, reggel 7 óra környékén észlehető a maximum és délután négy óra körül a minimum. Ezt az ingadozást a Nap melegítőhatása okozza. A REMS hőmérséklet mérései szerint a maximum hőmérséklet 15 és 0 °C között, a minimum pedig -75 és -85 °C között változik. A Rocknest elhagyása után a következő állomás a Yellowknife-öböl volt. Útközben a 101. solon (2012. november 16.) a Curiosity meglátogatott egy útba eső sziklát, majd az APXS spektrométerrel megvizsgálta mielőtt továbbhaladt. A 103. solon tesztelték a fúró működését. Útban a Yellowknife-öböl felé a rover a 120. és 121. solon áthaladt a Sahler-régiónak nevezett világosabb terepen. Ez a terep palás kibúvásnak bizonyult, az éles, késpenge szerű réteges kőzetlapok közötti réseket vörös por töltötte ki. A 126. solon a jármű leért a Yellowknife-öböl aljára, amelyet vékony réteges kőzetek borítottak be. A CheMin analízise megállapította, hogy az itt lévő sötétebb színű bazaltos kőzetben vékonyka, szulfátokban gazdag erek húzódnak. Ilyenek ereket a Sheepbed, a Crest és a Rapitan nevű részeken talált a rover. A ChemCam megállapította, hogy ezek az erek hidratált kalcium-szulfátot tartalmaznak, amely valószínűleg a korábban ott lévő folyékony vízből válhatott ki. Az év végén a 133. solon (december 19.) a járművet elirányították egy előre kinézett parkolóhelyre, ahol az ünnepek alatti időszakot töltötte.

Panoráma a Rocknest nevű helyen. (Külön lapon megnyitva a kép tovább nagyítható.)
Forrás: NASA Mars Exploration Program
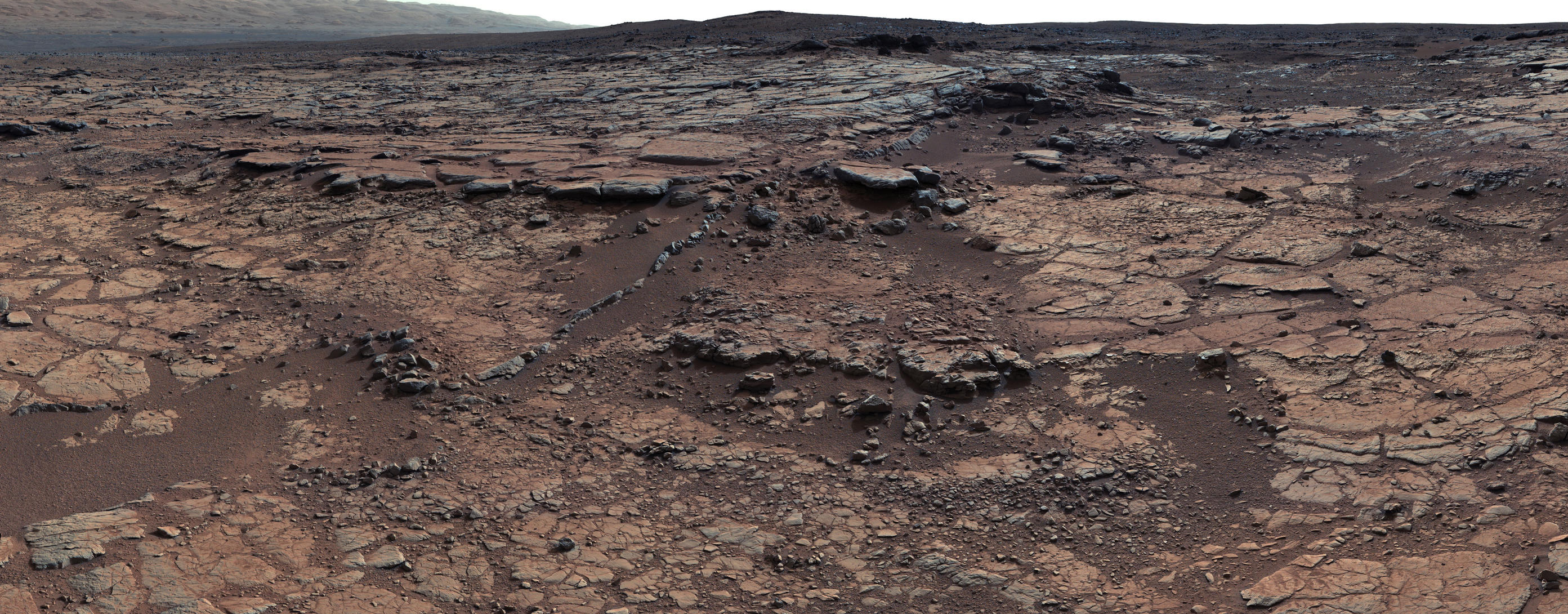
A Yellowknife-öböl.
Forrás: NASA Mars Exploration Program
A 147. solon (2013. január 2.) újrakezdődött a munka és a következő napokban a Curiosity a Snake-folyót tanulmányozta. A 156. solon (január 12.) némi probléma akadt a robotkarral, amit aztán sikerült gyorsan orvosolni. A 167. solon (január 23.) a Curiosity elérte a John Klein nevű helyet, amelyet az első fúrás végrehajtásának helyszíneként szemeltek ki a szakemberek. A területen sziklák törik át a homokos felszínt, a sziklakibúvást pedig világosabb színű ásványi erek szövik be. Számos teszt előzte meg az első fúrást. A 169. solon a rover megtisztította a DRT-vel a Wernecke nevű sziklát. A 170. solon a fúrófejet egy egész éjszakán keresztül hozzányomták a talajhoz, hogy megvizsgálják a hőmérsékletváltozás hatását a lenyomó erőre. A próbák után a 180. solon kezdték el a fúrási műveleteket és végül a 182. solon (február 9.) került sor az első teljes fúrási műveltre, egy 6,5 cm mély lyukat fúrtak a sziklába. A fúrás előtt és után a MAHLI műszerrel képeket készítettetek a fúrási pontról. Ez volt az első alkalom, hogy egy Marson tartozkodó robot lyukat fúrt a felszínbe. A 193. solon (február 20.) megkezdődőtt a kifúrt, szürke színű minta eljutatása a CheMin és SAM műszerekbe. Február 22. és 23. során a minták bekerültek a CheMin és a SAM fogadórészeibe. A kifúrt mintákban lévő vegyületek azt jelezték, hogy a Gale-kráter ezen területén 3 - 4 milliárd évvel ezelőtt víz volt. A finomszemcsés üledékes anyag húszszázaléknyi agyagot, különböző szulfátokat, foszfort, hidrogént, oxigént és szenet tartalmazott. Az anyag szűrkés színe azt jelezte, hogy vastartalmú ásványokat, esetleg magnetitet is tartalmaz. Február 27-én nem érkeztek meg a szokásos napi adatok a rovertől és a Curiosity a nap végén nem váltott át alvó üzemmódba sem. Mint később a két vezérlő számítógép közül az A jelű flash memóriájában problémák keletkeztek. Az A jelű vezérlő számítógép volt eddig a pontig a „pilóta”, míg a B jelű a „másodpilóta” szerepét töltötte be. Eredetileg az A számítógépnek át kellett volna automatikusan adnia a vezérlési szerepkört a másodpilótának, amint észlelte a problémát. Ez azonban nem történt meg és az A számítógép elkezdett furcsán viselkedni, nem hajtotta végre a Földről kapott parancsokat. Már csak egy óra volt hátra, addig a pontig, amikor megszűnik a kommunikáció a roverrel és azelőtt mindenképpen át kellett váltani a B számítógépre, különben a rover örökre elnémulhatott. Az irányító csapat elküldte a parancsot, majd várta a B számítógép jelentkezését. Egymás után teltek a percek és egyre idegesebbek lettek a csapat tagjai, mert nem érkezett válasz. Végül a B számítógép bejelentkezett. Ez a hiba könnyen a rover teljes működésének megszűnéséhez is vezethetett volna. A mérnökök megoldásképpen átkapcsolták a rovert a B jelű számítógépre, aminek hatására február 28-án a rover vész üzemmódra kapcsolt át. A Curiosity március 2-án jött ki a vész üzemmódból és egy nappal később kezdte használni a nagynyereségű antennáját. A műszerek üzemeltetését mindkét számítógép el tudta látni, ezért úgy döntöttek, hogy a B számítógép marad innentől az elsődleges. Néhány napig a mérnökök folytatták a B számítógép konfigurálását, hogy az megfelelően el tudja látni a feladatait. Nem tudták pontosan megállapítani az A számítógép hibájának az okát, bár a szakemberek arra gyanakodtak, hogy a kozmikus sugárzás nagyenergiájú részecskéi okozhatták azt. A probléma megoldását hátráltatta egy a Napból származó nagyenergiájú korona kilövellés is, ami a 207. solon (március 7.) érte el a Marsot, és ami miatt március 5-én alvó üzemmódba kellett kapcsolni a járművet. A részecske vihar elvonulta után a rover visszaállt normál üzemmódba a tudományos munka azonban még nem folytatódhatott, mert a 12 mérnöki kamera mindegyike az A számítógéphez volt rendelve. A B-vel utoljára 2012 áprilisában használták őket a Mars felé menet, így újra össze kellett hangolni őket. Miután ez megtörtént a B számítógéppel is jól működtek. Később a mérnököknek az A fedélzeti számítógép hibáját is sikerült a távirányítással megoldaniuk, de továbbra is a B maradt a „pilóta”.

A John Klein nevű fúrási lyuk.
Forrás: NASA Mars Exploration Program
A Curiosity selfie-je a John Klein nevű fúrás mellett.
Forrás: NASA Mars Exploration Program
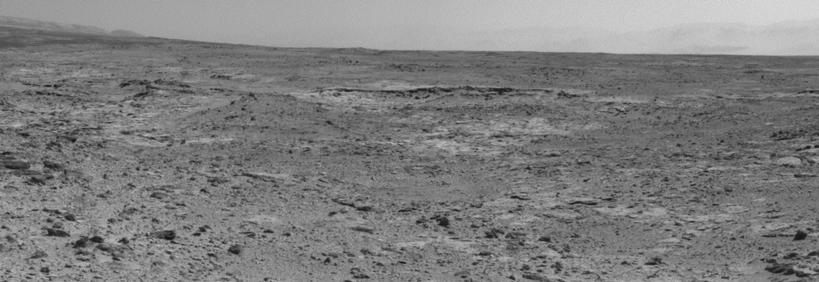
Panoráma a Cooperstown nevű helyen.
Forrás: NASA Mars Exploration Program
Időközben két kisebb hiba is felmerült a CHIMRA nevű minta előkészítő berendezéssel kapcsolatban. Egy szoftverhiba késleltette a minták kézbesítését a CheMin és a SAM számára, de az irányító csapat hamar megtalálta erre a megoldást. Ennél jóval aggasztóbb volt, hogy a földi roveren lévő CHIMRA szitája – amely kiszűri a 150 mikronnál szélesebb részecskéket – elkezdett leválni a helyéről. Ez csak erős használat után jelentkezett és a szita használható maradt, továbbá Curiosity mintakezelő berendezésével kapcsolatban semmiféle probléma nem mutatkozott. Ennek ellenére bevezettek néhány intézkedést annak érdekében, hogy csökkentsék a szita munkaterhelését a vörös bolygón (például 60 perc helyett csak 20 percig szitálták a mintákat). Március 12-én a projektben dolgozó szakemberek bejelentették egy sajtótájékoztató keretében, hogy a John Klein sziklánál végzett fúrás eredménye alapján a Mars korábban megfelelő környezet lehetett a mikrobiális élet kialakulása szempontjából. Az eredmény szerint megvolt minden ehhez szükséges körülmény. A CheMin és a SAM műszerek kén, nitrogén, hidrogén, oxigén, foszfor, szén és agyag jelenlétét mutatták ki a mintákban, amelyek az élet építő kövei. A SAM széndioxidot is talált a vizsgált mintában, ami azért fontos, mert egyes földi mikroorganizmusok képesek a széndioxidot felhasználni szervezetük építőköveiként. A szulfátok és szulfitok a Földön megfelelő energiát tudnak biztosítani a mikroorganizmusok számára. A korábban itt létező víz semleges, vagy enyhén sós lehetett, ami szintén megfelelő közeget jelenthetett. A folyékony víz nagyjából 3 milliárd évvel ezelőtt létezhetett itt. A rover emellett azonban nem talált komplex szerves vegyületekre, mint például aminosavakra utaló nyomokat, bár ezeket a lebomlásuk miatta a Földön sem könnyű megtalálni. Ezzel a felfedezésével a jármű tulajdonképpen teljesíttet a négy fő célkitűzéséből egyet. Megtalálta a nyomát annak, hogy a Mars egykoron olyan környezet volt, ami akár megfelelő lehetett a mikrobiális élet kialakulásához. Természetesen ez nem jelenti azt, hogy bizonyítottan létezett a Marson mikrobiális élet korábban. Március 16-án ismét számítógép hiba zavarta meg a jármű munkáját. Egy fájl, amit törölni szerettek volna még használatban volt, emiatt pedig a rover visszakerült a vész üzemmódba. A 226. solon (március 26.) végre, ha lassan is, de folytatódhatott a leállással megszakadt tudományos munka. A Curiosity folytatta a sugárzás és a légkör tanulmányozását, valamint újabb kifúrt mintát jutatott a műszerekbe. Az első marsi sugárzásmérések biztatóak voltak, melyek szerint a jármű a Marsig tartó út alatt nagyobb dózisú sugárzást mért, mint a bolygó felszínén. A felszíni eredmények a Nemzetközi Űrállomáson mért dózisokhoz hasonló mértékűek voltak. Ezek az értékek csak napkitörés esetén nőttek meg. A DAN műszer mérései szerint a leszállási zóna alföldje csak ásványokban tartalmaz némi kötött vizet. A talaj 60 cm mélységig nagyon száraz, alig néhány százalék hidrogéntartalmat mutat. A Yellowknife-öböl bizonyult a legszárazabbnak a maga 2,5 – 2,8 százalékos víztartalmával. A DAN mérések eredményei a kötött hidroxilgyököket és kristályrácsban lévő hidrogént jelzik. A CheMin és a SAM folytatta a fúrási minták elemzését, a ChemCam sikeres kémiai analízist hajtott végre a kifúrt lyuk falán, a Curiosity pedig jól működött a B vezérlő számítógéppel.

Panoráma a Darwin nevű helyről.
Forrás: NASA Mars Exploration Program

A Curiosity útvonala 2013 végéig.
Forrás: NASA Mars Exploration Program
Április 4. és május 1. között szünetelt a kommunikáció a roverrel, mert a Föld és a Mars egymáshoz képest a Nap két ellentétes oldalán helyezkedett el, ami miatt a kommunikáció a járművel nem volt biztonságos. A Nap sugárzása megzavarhatta a küldött parancsokat, így erre az időszakra leállították a rovert. Május 9-én a Curiosity új repülési szoftvert kapott és a 269. sol nagyrészt a kalibrációval telt. A 272. solon a jármű átment a következő fúrási helyszínre, a Cumberland-re és itt maradt egészen június elejéig. Itt került sor a 279. solon a következő fúrásra. A 301. és 302. sol során a rover megközelítette a Point Lake sziklakibúvást, ahol MAHLI, APXS és ChemCam méréseket végzett. A következő megálló az egyszer már érintett Shaler-régió lett. Itt adódott némi probléma a lejtő megmászásával és a kerékcsúszással. Egészen eddig a jármű kelet felé haladt. Ezután a Curiosity a 326. solon (július 5.) kezdte meg a nagyjából 8 km hosszú útját a délnyugat felé található Sharp-hegy felé. A délre elhelyezkedő kráter csúcshoz vezető úton a rover több helyen (Darwin, Cooperstown) panorámafotókat és geológiai vizsgálatokat végzett. Az első időben a haladást korlátozta a B vezérlő számítógép és a navigációs- és veszélyelkerülő rendszer összeakadása, később ezt újrakalibrálva a probléma megszűnt és a Curiosity önállóan navigálva egyre nagyobb távolságokat, naponta akár több mint 100 métert is megtett. A 336. solon (július 16.) már 1 km-re távolodott el a leszállóhelytől, augusztus elején pedig, amikor eljött a Marsra érkezés első évfordulója a jármű általa összesen megtett távolság 1,6 km-re növekedett. November elején újabb szoftverfrissítést kapott a rover. A hónap közepén a radioizotópos generátorban keletkezett rövidzár miatt energiahiány lépett fel, ami megállásra késztette a rovert. A 465. solon (november 25.) folytatódhatott a haladás délnyugat felé. Időközben egy előre nem látott probléma is felütötte a fejét, az éles sziklákon való haladás ugyanis kezdte megviselni a kereket, horpadások ütésnyomok jelentek meg rajtuk. A két első keréken jelentek meg először sérülések. A 411. solon (október 2.) észlelték azt, hogy a bal első kerék felülete átszakadt. A 463. solon (november 24.) pedig már jóval több átszakadást észleltek. November végén a kerekek kopása és elhasználódás miatt a mérnökök a következő időszakban a MAHLI kamerával folyamatosan figyelték azokat. Az útvonal tervezők pedig ettől kezdve inkább a puhább talajon való menetet részesítették előnyben. Újabb szoftverfrissítést is kapott a rover, immáron a harmadikat 2012. augusztusi érkezése óta. Ez a frissítés javította robotkar lejtőn való használatát. December 9-én bejelentették, hogy a Curiosity megtalálta a bizonyítékát egy 3,7 milliárd évvel ezelőtt létező, 50 km hosszú és 5 km széles marsi tónak. A tó egykoron beborította a Gale-kráter egy részét és legalább 10 ezer évig létezett. A tó létezésekor a terület klímája hideg lehetet és a tó alkalomszerűen befagyhatott. Ezt a Curiosity által a Yellowknife-öböl sziklakibúvásainál, az üledékes, finomszemcsés sziklákon végzett analízise alapján állapították meg a szakemberek. Ez a sziklafajta, ami agyagot is tartalmaz, vízben való lerakódás útján keletkezik. Az agyag mellett kén, nitrogén, hidrogén, oxigén, foszfor és szén szintén megtalálható a sziklákban. 2013 végéig a Curiosity összesen 2,5 km-nyi utat tett meg és több felfedezéssel gazdagította az emberiség ismereteit a vörös bolygóról, de a rover missziója itt még nem ért véget. A következő részben a rover 2014 és 2021 közötti működéséről lesz szó.
- Aeromagazin lapszámok: 2011/12, 2012/11, 2013/03, 2013/05, 2013/10 - JetMedia Kiadó Kft.
- CURIOSITY
- Bizarre Mars Mountain an Inviting Target for NASA's Curiosity Rover
- Mars Rover Curiosity to Double as Martian Weather Station
- How New Mars Rover Will 'Cook' Red Planet Rocks
- Curiosity Rover Will Sleuth for Clues to Water on Mars
- Huge Mars Robot Armed With Laser, Cameras, Curiosity (Infographic)
- Why NASA's Big Mars Rover Has a Laser to Zap Rocks
- Mars Rover Curiosity Will Hunt for Life's Building Blocks
- NASA on Edge for Mars Rover Landing's 'Seven Minutes of Terror'
- Mars Rover Finds Ancient Streambed Where Water Once Flowed
- Curiosity Rover to Eat Mars Rock Dust After Drilling Success
- 1st Drilling on Mars by NASA's Curiosity Rover (Photos)
- Red Planet Mars Not So Red Beneath the Surface
- NASA's Curiosity Rover Eats 1st Mars Rock Sample
- NASA's Mars Rover Curiosity Recovering from Computer Glitch
- NASA Puts Mars Rover Curiosity on Standby After Solar Flare
- Wow! Ancient Mars Could Have Supported Primitive Life, NASA Says
- Mars Could Once Have Supported Life: What You Need to Know
- Mars Science by Curiosity Rover Hits New Snag
- Mars Rover Curiosity Resumes Science Work After Computer Glitch
- Mars Rover Curiosity's 7 Biggest Discoveries (So Far)
- Ancient Mars Lake Could Have Supported Life, Curiosity Rover Shows
- Rugged Martian Terrain Chewing Up Curiosity Rover's Wheels
- A Glitch Nearly Killed NASA's Curiosity Rover After 6 Months on Mars
Kapcsolódó írások
Kerekeken a Naprendszerben 1.
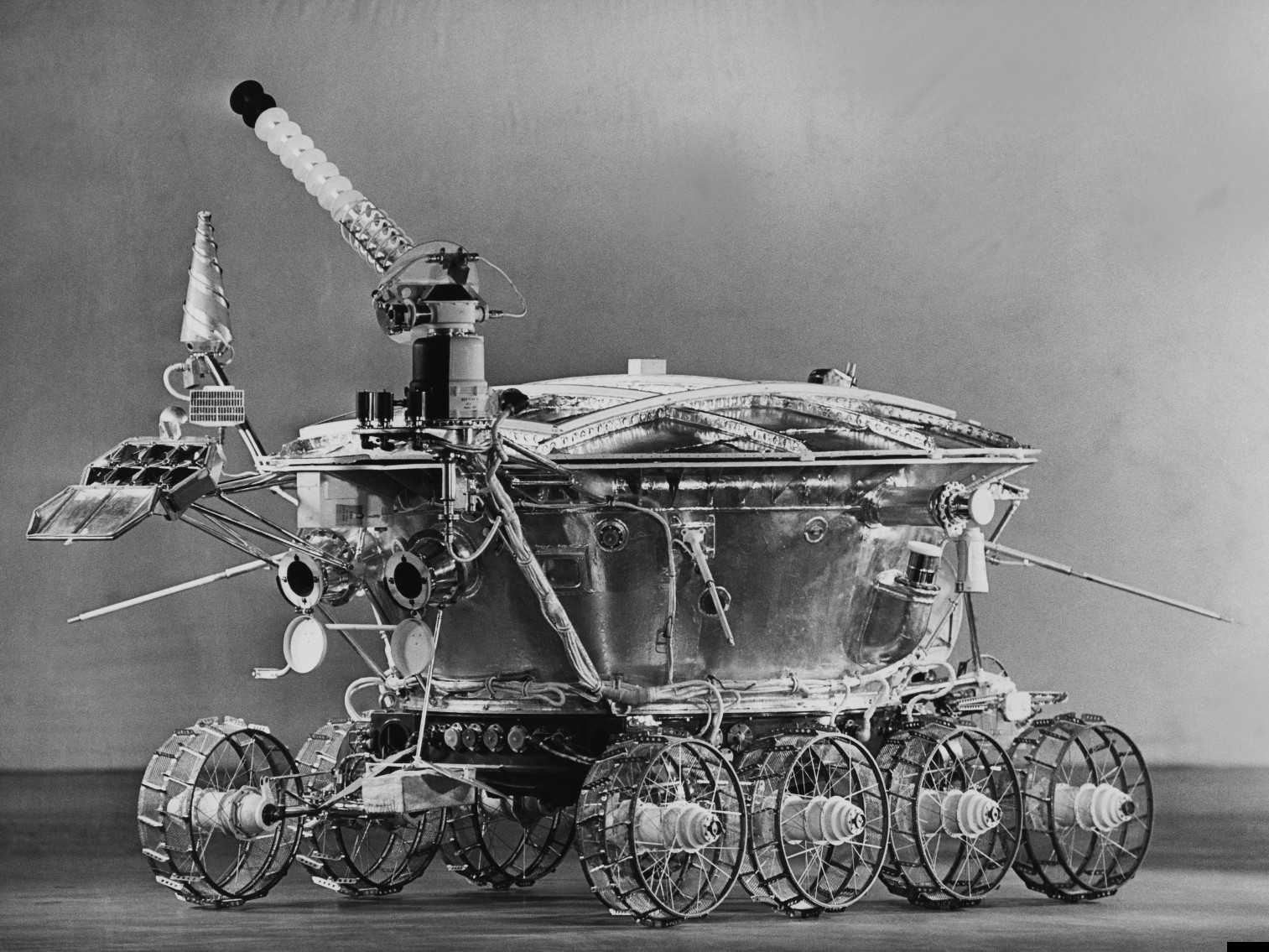
A Lunohod holdjárók
Kerekeken a Naprendszerben 5.
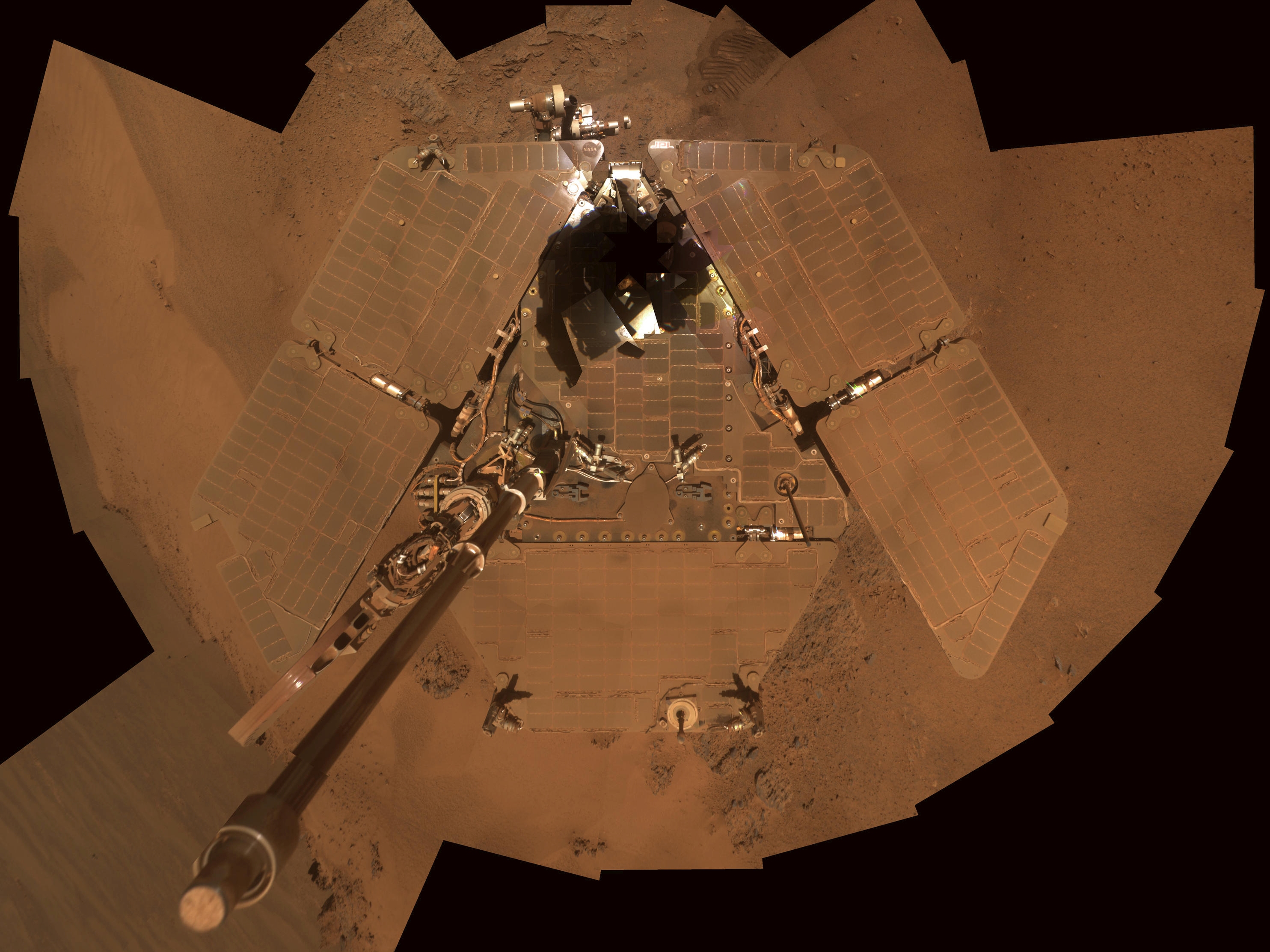
A Spirit és az Opportunity 2. rész