Kerekeken a Naprendszerben 11. rész
A Perseverance és az Ingenuity
2021. február 18-án sikeresen landolt a Marson a NASA ötödik roverje, a Perseverance. A rover híres elődei, a Sojourner, a Spirit, az Opportunity és a Curiosity jócskán kitágították azt az ismeretanyagot, amit a vörös bolygóról addig tudtunk. A Perseverance várhatóan ennél sokkal tovább tolja majd a határokat, hiszen célja nem kisebb, mint megtalálni az egykor lehetséges marsi mikrobiális élet nyomait, amennyiben létezett korábban bármiféle élet a Marson.
A NASA immáron több mint 25 éve küld a Marsra rovereket, amelyek több évig tartó folyamatos munkával tárják fel a bolygót (Sojourner 1997, Spirit 2004 - 2010, Opportunity 2004 - 2018, Curiosity 2012 -). A Perseverance a következő a sorban, amely nagyban épít az elődeivel megszerzett tapasztalatokra. A program Mars 2020 néven 2012. december 4-én lett bejelentve az Amerikai Geofizikai Szövetség (American Geophysical Union) éves ülésén. A legfontosabb célként az egykor lehetséges élet lenyomatainak megtalálását tűzték ki a program elé. Mit is jelen ez pontosan? A Perseverance-nak először is olyan helyeket kell találnia, ahol korábban megfelelő körülmények uralkodtak az élet kialakulása szempontjából. Élet alatt itt elsősorban mikrobákat kell értenünk. A leszálló hely kiválasztása során több mint hatvan potenciális jelöltet vizsgáltak meg, végül a 45 km átmérőjű Jezero-kráterre esett a választás. A Jezero a marsi egyenlítőtől északra lévő Isidis Planitia síkság nyugati szélén található. A kráterről készült felvételek alapján valószínűsíthető, hogy a terület egy tó és az abba ömlő folyó torkolatvidéke lehetett évmilliárdokkal korábban. Ezen a területen fogja majd a rover a korábban esetleg létező élet nyomait kutatni a kőzetekben. Emellett a rover fontos előkészítő munkát végez egy későbbi nagyszabású misszió számára. A Perseverance a robotkarja végén elhelyezett fúróval mintákat fog gyűjteni a marsi kövekből és sziklákból, ezeket a mintákat légmentesen zárható tároló csövekbe rakja és kijelölt helyeken elhelyezi majd a Mars felszínére. A felszínen felhalmozott mintákat egy másik űrszonda fogja majd visszahozni a Földre a tervek szerint valamikor a 2030-as évek elején. A rover ezeken felül visz magával egy kis helikoptert, amivel a marsi légkörben való repülést fogják vizsgálni, illetve egy oxigéngeneráló berendezést, amely a tervek szerint a Mars légköréből fogja a számunkra nagyon fontos gázt kinyerni.
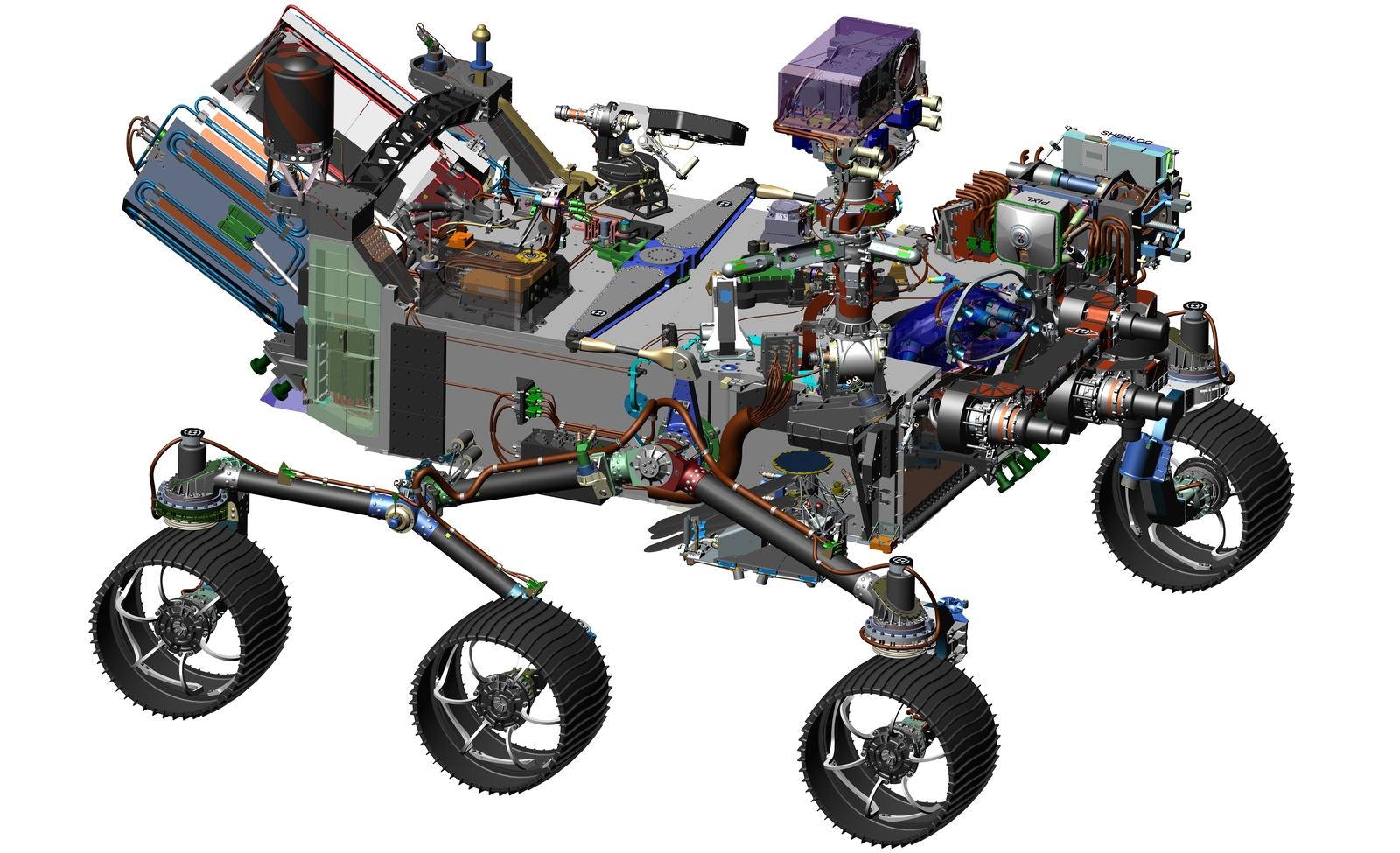
A Perseverance CAD modellje.
Forrás: NASA Mars Exploration Program
A Perseverance csakúgy, mint elődei és a NASA űrszondáinak nagy része, a kaliforniai Pasadena-ban lévő JPL-ben (Jet Propulsion Laboratory) lett megtervezve és összeszerelve. A tervezés során a Curiosity volt a kiindulási alap, a Perseverance az elődhöz képest hasonló felépítéssel és méretekkel, de eltérő műszerezettséggel rendelkezik. Körülbelül 3 méter hosszú, 2,7 méter széles és 2,2 méter magas, a teljes súlya pedig 1025 kg. A rover testét a fűtött elektronikus egység (Warm Electronics Box - WEB) alkotja. Ebben helyezkednek el a rover berendezései és műszerei, a WEB védi meg a berendezéseket a ritka légkör, a hideg és a por káros hatásaitól. A járműben elhelyezett kettő darab Rover Compute Element (RCE) egység szolgál fedélzeti számítógépként. A két egység teljesen azonos egymással, az egyik folyamatosan üzemel, míg társa alvó üzemmódban tartalékként szolgál. Az RCE a rover berendezéseivel két hálózaton keresztül tud kommunikálni. BAE RAD 750 200 MHz-es kozmikus sugárzás hatása ellen megerősített központi processzorral, 2 gigabyte memóriával, 256 megabyte RAM-mal és 256 kilobyte ROM-mal rendelkezik. Az RCE folyamatosan figyeli és kontrolálja a rover belső hőmérsékletét, energiaháztartását és az éppen folyamatban lévő tevékenységeit, illetve információs adatcsomagokat állít össze a rover helyzetéről és állapotáról a földi irányítás számára, valamint ütemezi és lebonyolítja a Földel való kommunikációt. Az Inertial Measurement Unit (IMU) egység felelős a rover helyzetének precíz meghatározásáért, amely folyamatosan méri a jármű x, y és z tengely szerinti koordinátáit, illetve a három tengely szerinti dőléseit. A WEB-hez csatlakoznak a futómű elemei, a robotkar, a radioizotópos energiaforrás és a kameraállvány.
A futómű elemei a kiegyenlítő mű, a rocker és bogie elnevezésű felfüggesztő karok, valamint a hat darab kerék. A kiegyenlítőmű a WEB tetején található és egy-egy torziós karral kapcsolódik a bal és jobb oldali rockerekhez, feladata a jármű dőlésének minimumon tartása és az egyes felfüggesztő karok mozgásainak csillapítása. Rocker-nek hívják a csatlakozási ponttól a menetirány szerinti első kerékig tartó kart. A bogie pedig az a felfüggesztő kar, ami a középső és a hátsó kerekeket tartalmazza. Mind a hat kerék önálló hajtással rendelkezik a kerékagyakba épített elektromotorok révén. Az első és hátsó kerekek elforgathatók így a rover egyhelyben meg tud fordulni a függőleges tengelye körül. A felfüggesztés elemei titán csövekből, a kerekek alumíniumból készültek. A Perseverance kerekei nagyobb átmérőjűek - 52,5 cm -, de keskenyebbek, mint a Curiosity kerekei. Külső felületükön 48 darab titán borda található a tapadás növelése érdekében. Menet közben a felfüggesztés kialakításából adódóan nagyjából egyenlő erő terheli a kerekeket. A jármű képes 45°-os emelkedőn/lejtőn fel- illetve le mászni, de biztonsági okból maximum 30°-ra mérsékelték a megmászható emelkedők/lejtők szögét. A Perseverance szélesebb nyomtávval, nagyobb has magassággal rendelkezik, mint elődje, ezen felül van egy különálló navigációs számítógépe is. Fejlettebb navigációs szoftvere közvetlenebb útvonalak használatát teszi lehetővé sokkal nagyobb sebességgel, mint a Curiosity esetében. A Perseverance maximális sebessége 120 m/h a Curiosity 20m/h-val szemben. A jármű has magassága pedig lehetővé teszi, hogy 40 cm magas kövek között is el tudjon közlekedni. A rover 2,1 méter hosszú robotkarja öt csuklóval rendelkezik hasonlóan az emberi karhoz. Mozgása során szenzorok figyelnek arra, hogy ne ütődjön oda sem a vizsgált sziklának, sem pedig a talajnak. A csuklók megfelelnek a váll, könyök, csukló ízületeinek, a robotkar végén pedig egy toronynak elnevezett műszer együttes található. A toronyban helyezkedik el egy fúró berendezés, amely képes mintát venni a marsi kövekből és sziklákból, emellett a torony képes mikroszkóp felvételeket készíteni és meghatározni a vizsgált szikla ásványi- és kémiai összetételét. A fúró cserélhető fejjel rendelkezik, sima fúrásra és ütve fúrásra is képes, átmérője 27 mm. A háromféle fúrófej közül a magfúró (keményebb kőzetek) és a regolitfúró (lazább kőzetek) segítségével a kifúrt minta egyből a mintavevő csövekbe kerül. A koptató fej segítségével pedig bizonyos vastagságú külső rétegeket el tudnak távolítani a szikla felületéről, hogy ezután mélyebbről tudjanak mintát venni.

A Curiosity és a Perseverance kerekeinek összehasonlítása. Az új rover nagyobb átmérőjű, de keskenyebb kerekekkel rendelkezik, mint elődje.
A kerekek felületének bordázatát cikcakk vonalról finomabb hullámokra változtatták és sűrűbben helyezték el őket, mint a Curiosity-nél.
Forrás: NASA Mars Exploration Program
A Perseverance egyik főfeladata marsi kőzetminták összegyűjtése. A fúrófej segítségével a kőzetekből kinyert minta egy légmentesen zárható mintavételi csőbe kerül. Amint a cső megtelt egy robotkar kicseréli azt egy üres mintavételi csőre, a mintával telit pedig egy erre a célra kialakított tároló helyre helyezi át. Összesen 43 mintavételi cső van, ebből 38 darab üres, 5 darab pedig speciális feladatú. Annak ellenére, hogy az indulás előtt a rovert alapos fertőtlenítésnek vettetek alá, előfordulhatnak rajta olyan szerves és szervetlen anyagok, amelyek beszennyezhetik a mintákat és később már lehetetlen megmondani, hogy az adott szerves anyag a Földről vagy esetleg a Marsról származik. A jármű működése során szintén termel bizonyos szennyező anyagokat. Éppen ezért a járművet felszerelték 5 darab úgynevezett szemtanú mintacsővel, amelyeket előzetesen olyan szerves és szervetlen anyagmintákkal töltötték meg, amelyek túlélhették a fertőtlenítést. Bizonyos mintavételi helyeken a szemtanú csöveket felnyitják majd és feltöltik a környezetből származó, rover által generált anyagokkal. A tervek szerint később ezekkel a szemtanú mintákkal ki lehet szűrni az esetleges földi eredetű szennyeződéseket a sziklákból vett mintákban. A szigetelt mintákat tartalmazó csövek a rover belsejében maradnak egészen addig, amíg az irányító csapat úgy nem dönt, hogy elhelyezhetik őket a felszínen egy jól beazonosítható helyen, ahol a későbbi misszió meg tudja találni és vissza tudja őket hozni a Földre. Tervek szerint legalább 20 csövet szeretnének mintákkal megtölteni. Egy mintavételi cső 13 mm átmérőjű, 60 mm hosszú és 10-15 grammnyi minta elhelyezésére alkalmas.
A Perseverance-ot csakúgy, mint elődjét a Curiosity-t, egy radioizotópos energiaforrás látja el energiával. Az MMRTG (Multi-Mission Radioisotope Thermoelectric Generator) a plutónium bomlásából származó hőt termoelemek segítségével elektromos árammá alakítja át, ezzel tölti a rover két fő lítium-ion akkumulátorát, illetve a folyamatból származó maradék hőt a rover belső berendezéseinek fűtésére használja fel. Az MMRTG a Perseverance hátulján helyezkedik el, 64 cm átmérőjű és 66 cm hosszú, 45 kg tömegű és 4,8 kg-nyi plutónium-dioxiddal van töltve. Összteljesítménye 110 W és 14 év folyamatos működést biztosít a Perseverance-nak. Az izotóp mennyiséget speciális többrétegű bevonat védi a sérüléstől és a környezetbe való kikerüléstől. A Perseverance három féle kommunikációs antennája közül a 400 MHz-es UHF ultra-nagyfrekvenciás antenna feladata a Földel való kommunikáció a Mars körül keringő NASA űrszondák segítségével. Adattovábbítási sebessége 2 megabit/s. A hatszögű 30 cm-es mikrohullámú nagynyereséges antenna képes közvetlenül a Földön található Deep Space Network hálózat követőállomásaival kommunikálni. Adattovábbítási sebessége 160/500 bit/s a 34 méter átmérőjű földi antennák és 800/3000 bit/s 70 méter átmérőjű földi antennák esetén, frekvencia tartománya 7 és 8 GHz között van. A kisnyereségű mikrohullámú antenna feladata a földről érkező jelek vétele. Bármilyen irányból képes adatokat fogadni. Adattovábbítási sebessége 10 bit/s a 34 méteres antennák és 30 bit/s 70 méteres antennák esetén, frekvencia tartománya megegyezik a nagynyereségű antennáéval.
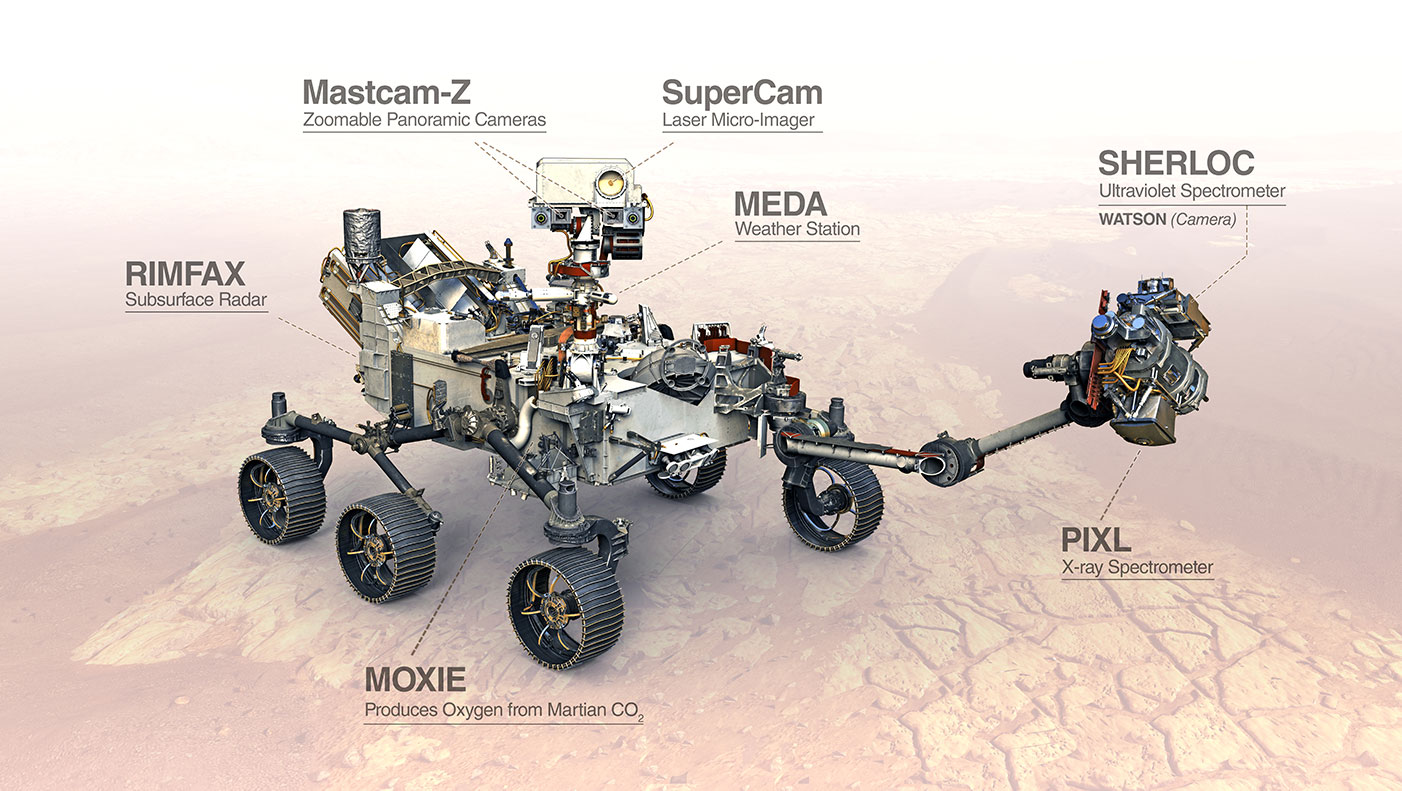
A Perseverance műszerei.
Forrás: NASA Mars Exploration Program
A rover célja a tudományos kutatás, ehhez pedig megfelelő műszerekre van szüksége. A Perseverance eszköztára a hét műszerből tevődik össze. A Mastcam-Z egy multi spektrális sztereo kamerarendszer. Két kamera kapott helyet a rover kamera állványán egymástól 24,2 cm-re eltolva. A rendszer feladata HD videók, 2 és 3 dimenziós panoráma felvételek készítése a rovert körülvevő környezetről, illetve zoom funkciójának használatával közeli felvételek készítése távolabbi objektumokról. A Mastcam-Z segítségével nagyobb távolságról kiválaszthatóak azok a kövek és szikladarabok, amelyek érdekesek lehetnek további vizsgálat szempontjából. Segítségével beazonosíthatóak azok a helyek is, amelyeken évmilliárdokkal ezelőtt folyók, illetve tavak helyezkedhettek el. A kamerarendszer 360 °-ban mozgatható a függőleges, és 180 °-ban a vízszintes tengelye körül. A műszert az Arizonai Állami Egyetem munkatársai fejlesztették ki James Bell vezetésével. Zoom funkciója segítségével körülbelül 110 m távolságról képes egy centis objektumot észlelni. Felbontása 2 megapixel, maximum 1600 x 1200 pixel képenként, egy pixel a nagyítás függvényében 150 mikrométertől 7,4 milliméternek felel meg. A MEDA (Mars Environmental Dynamics Analyzer) környezeti szenzorokat tartalmaz, amelyek a por mennyiségét és porszemcse nagyságot mérik a marsi légkörben, emellett figyelik a szél sebességét és irányát, a nyomást, a relatív páratartalmat, a léghőmérsékletet és a talajhőmérsékletet, valamint az UV- és infravörös sugárzást. A műszer a kamera állvány közepén helyezkedik el. A MEDA feladat még az is, hogy megfigyelje a por hatását a rover berendezéseire. A műszert a madridi Nemzeti Repüléstudományi Intézet Asztrobiológiai részlege (Centro de Astrobiologia, Instituto Nacional de Tecnica Aeroespacial) fejlesztette ki Jose Rodriguez-Manfredi vezetésével. A MOXIE (Mars Oxygen In-Situ Resource Utilization Experiment) egy olyan kísérleti berendezés, amely képes a marsi légkörben található szén-dioxidból oxigént előállítani. A rover elejében a jobb oldalon helyezkedik el, nagyjából akkora méretű, mint egy személygépjármű akkumulátor. A földi növények anyagcseréjéhez hasonlóan működik, elektrokémiai úton bontja le a szén-dioxidot oxigén molekulákra és szén-monoxidra. A berendezés Massachusetts államban lévő cambridge-i MTI egyetem Michael Hecht vezette csapatának fejlesztése. A berendezés egy órányi működés során maximum 10 grammnyi oxigént tud előállítani.
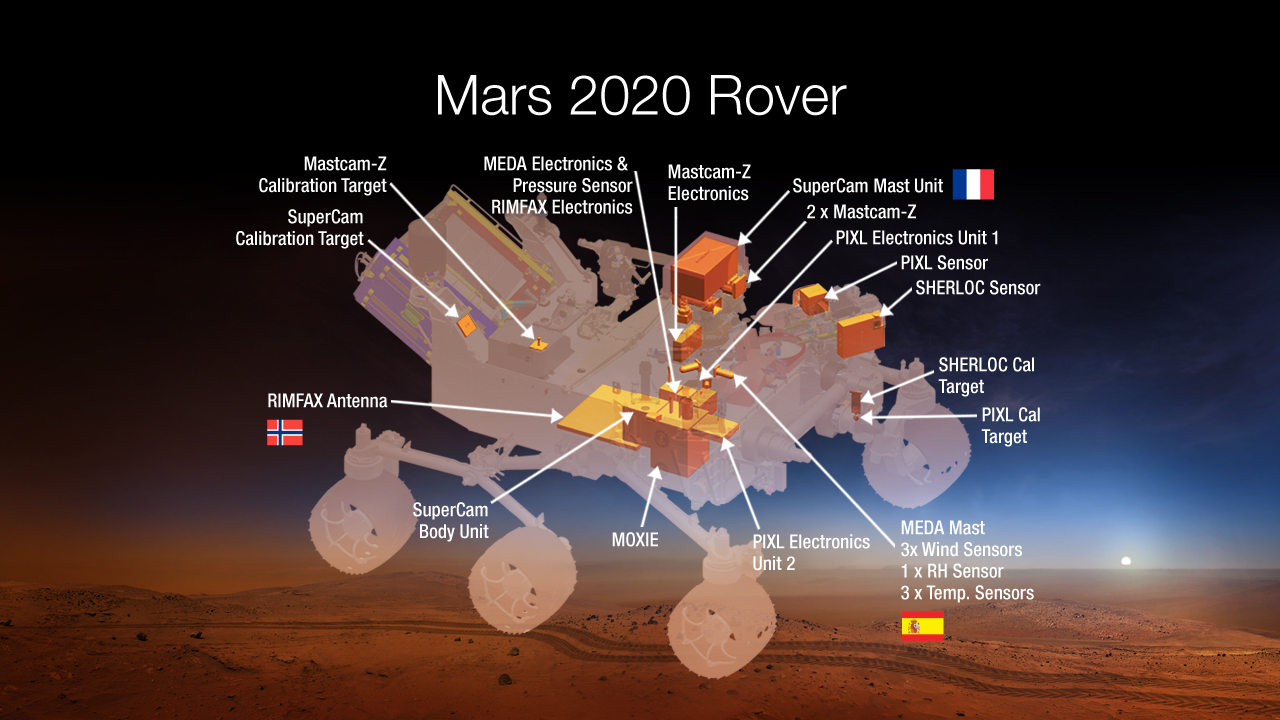
A Perseverance műszereinek elhelyezkedése a roveren belül.
Forrás: NASA Mars Exploration Program
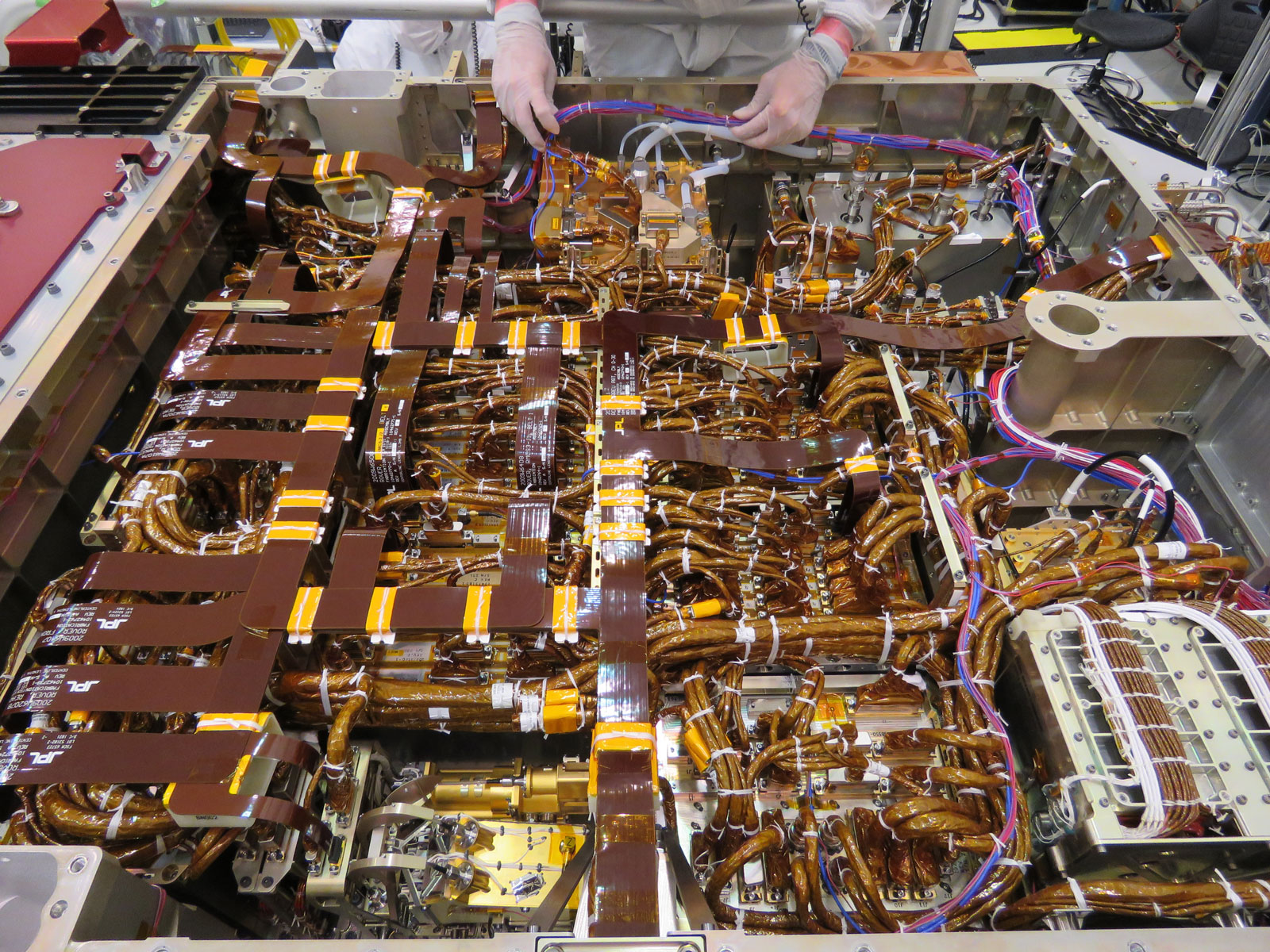
Pillantás a rover belsejébe a szerelése közben a JPL Pasadena-i szerelőüzemében.
Forrás: NASA Mars Exploration Program

A mintavételi csövek és tárolójuk. A tároló 30 °C alatt tartja a minták hőmérsékletét, hogy azok a számukra természetes közegben várják az összegyüjtést.
Forrás: NASA Mars Exploration Program
A PIXL (Planetary Instrument for X-ray Lithochemistry) egy röntgen spektrofotométer, amely a sziklák és kövek kémiai összetételét vizsgálja milliméteresnél kisebb felbontásban. Emellett a kamerája képes nagyon közeli felvételeket készíteni szemcse méretű anyagokról. A mikrobák megváltoztatják a környezetük anyagi és kémiai összetételét és úgynevezett mikrofilmet hoznak létre, amelyet a kőzetek képesek megőrizni. A PIXL röntgen sugarát egy nagyon kisméretű helyre fókuszálva és a keletkező fluoreszkálást vizsgálva meghatározhatóak az adott lenyomat jellemzői. A PIXL húszféle egykor létező élő szervezet által hagyott nyomot képes detektálni. A műszer a robotkar végén, a toronyban helyezkedik el. A PIXL-t a JPL munkatársai fejlesztették ki Abigail Allwood vezetésével. A RIMFAX (Radar Imager for Mars' Subsurface Experiment) egy talajradar, amely rádióhullámok segítségével képes felderíteni a rover alatti talajt. A rover hátulsó részén, a WEB alján helyezkedik el. Frekvencia tartománya 150-től 1200 MHz-ig terjed. Az alacsonyabb frekvenciájú hullámok mélyebbre hatolnak, mint a magasabb frekvenciájúak, így a műszer különböző mélységek vizsgálatára alkalmas. Függőleges felbontása 15 és 30 cm közötti, feltárási mélysége maximálisan 10 méter és a rover mozgása során 10 centiméterenként végez méréseket. Képes detektálni a talajban lévő víz- és jég zárványokat és a só lerakódásokat. A műszert az Oslói Egyetem munkatársai fejlesztették ki Svein-Erik Hamran vezetésével. A SHERLOC (Scanning Habitable Environments with Raman and Luminescence for Organics and Chemicals) egy kamerából, egy 248,6 nm hullámhosszúságú mély ultraviola lézerből és spektrofotométerből álló műszer. Feladata a vízből hátra maradt ásványi és szerves anyagok utáni kutatás. A lézer általi besugárzás hatására keletkező fluoreszkálást képes érzékelni. Vizsgálatához a WATSON (Wide Angle Topographic Sensor for Operations and eNgineering) elnevezésű színes kamera ad támogatást, amely a kőzetek felszínéről készít közeli felvételeket. A műszer együttes a rover robotkarjának végén található toronyban, illetve a WEB tetején helyezkedik el. Nappal és éjjel is tud működni. A SHERLOC a JPL Luther Beegle vezette csapatának fejlesztése. A SHERLOC felbontása 10,1 mikrométer, a WATSON-é 15,9 mikrométer, a lézeré pedig 100 mikrométer. A SuperCam egy kamerából, lézerből, spektrofotométerből és mikrofonból álló műszer, amely a kőzetek és a talaj kémiai összetételét képes meghatározni. Lézerimpulzust lő ki 7 méter távolságból egy nagyon kis területre fokuszálva, ami plazmává változtatja a követ, így a spektroszkóppal meg lehet határozni annak anyagát. A SuperCam a Los Alamos Nemzeti Laboratórium (Los Alamos National Laboratory) Roger Wiens vezette csapatának fejlesztése, a Curiosity-n lévő ChemCam továbbfejlesztése. Érzékelő egysége a kamera állványon helyezkedik el és hét méter távolságból képes meghatározni egy ceruzahegynyi terület összetételét. Emellett képes megfigyelni a légkörben lévő molekulák, vízjég és por által elnyelt és visszavert napsugárzást, ami közelebb visz a marsi időjárás működésének megértéséhez. Továbbá a SuperCam képes meghatározni, hogy a marsi por mely összetevői jelentenek veszély az emberek számára egy jövőbeni misszió esetén. Emellett a SuperCam mikrofonja figyeli a környezet hangjait és a lézer által generált hangokat, amelyek elemzéséből következtetni lehet a vizsgált szikla szerkezetére.
A rover által magával vitt kisméretű helikopter az első repülő szerkezet lesz, amely egy másik bolygó légkörében repülni fog. Az 1,8 kilogrammos szerkezet két egymással szembe forgó könnyű rotorral van felszerelve, amelyek 1,2 méter hosszúak és 2400 fordulat/perc sebességre képesek. A ritka marsi légkörben sokkal nagyobb kihívást jelent a repülés a kisebb felhajtóerő miatt, ezért a helikopter rotorjainak nagyobb fordulatszámmal kell forogniuk, mint a földi légkörben. A helikopter hatótávját 300 méteresre, maximális repülési magasságát pedig 5 méterre tervezik. Műszereket nem helyeztek el rajta, csupán két kamerával rendelkezik. A repüléshez szükséges energiát hat darab lítium-ion akkumulátor biztosítja. A helikopter autonóm módon repül majd és a roveren keresztül tartja a kapcsolatot a Földdel. A helikopter rendszereit a rotorok 50-es fordulatra való felpörgetésével a JPL Pasadena-i laborjában, egy teszt kamrában kialakított szimulált marsi légkörben tesztelték. A helikopter rover belsejében kialakított üregben utazik majd a Marsra, amelyet alulról egy ledobható borítás véd. A tesztrepüléséhez szükség van egy olyan területre, ahol a talaj kellően sima és nincsenek akadályt jelentő nagyméretű kövek és sziklák. A megfelelő helyen az alsó védőborítása leválik és a Perseverance egyszerűen lepottyantja a talajra a helikopter, majd elhajt tőle egy biztonságos, legalább 50 méteres távolságra. A helikoptert 6 napig tesztelik az első repülés előtt, majd öt tesztrepülést fognak végezni vele egy egyhónapos időszakon belül. A helikopter projektmenedzsere a JPL-ben MiMi Aung volt, míg a repülések során a repülési terv végrehajtásáért felelős főpilóta posztot Håvard Grip kapta meg.

A Perseverance kisméretű helikoptere, az Ingenuity. A helikopter két, egymással szembeforgó rotorral rendelkezik, a repüléshez szükséges
energiát pedig a tetején lévő napelem biztosítja.
Forrás: NASA Mars Exploration Program
A Perseverance számos kamerával van felszerelve, amelyek feladatuk szerint a következő csoportokba sorolhatók: leszállást közvetítő kamerák, mérnöki kamerák és tudományos kamerák. A leszállást közvetítő kamerák feladata az, hogy információkkal szolgáljanak a leszállás folyamatáról, a légkörbe lépéstől kezdődően egészen a talajérésig. A jövőbeni küldetések szempontjából nagyon fontos, hogy minden rendszer működéséről, ami a leszállásban részt vesz, a hő pajzstól kezdve az ejtőernyőkön és a leszálló fokozaton keresztül a függeszkedés folyamatáig, minél szélesebb körű képet kapjanak a mérnökök. Ilyen kamerák vannak elhelyezve az áramvonalas védőburkolaton az ejtőernyők nyitási irányába nézve, a leszálló fokozaton lefelé a rover felé nézve és a roveren felfelé és lefelé nézve is. A leszállást közvetítő kamerák másik csoportja a biztonságos leszállás segítik elő: a Lander Vision System kamerái megfigyelik a rover alatti tájat, amikor ejtőernyőn lógva ereszkedik lefelé és információval látják el a Terrain-Relative Navigation elnevezésű vezérlő programot. A Terrain-Relative Navigation (TRN) segítségével a leszálló fokozat képes elkerülni a veszélyes helyeket leszállás közben. A program a Mars Reconnaissance Orbiter űrszonda által készített fényképekből a United States Geological Survey (USGS) kutatói által összeállított 25 cm felbontású térképeket használja fel. A TRN összeveti a leszálló fokozat kamerái által látott képet a térképekkel, így pontos navigációs adatokat biztosít a leszálláshoz, emellett a kamera képeken látható veszélyes felszíni alakzatok esetén parancsot ad a fokozatnak az ereszkedés irányának megváltozatására. A mérnöki kamerák feladat a rover körüli környezet megfigyelése, a jármű és a robotkar mozgásának elősegítése és a legmegfelelőbb útvonal megtalálása. A HazCam kamerák feladata a veszélyekre való figyelés. Hat ilyen kamera van elhelyezve a roveren, négy elől és kettő hátul. Ezek a kamerák figyelik a veszélyes köveket, árkokat és dűnéket. A navigációs kamerák feladat a rover mozgásának segítése, két kamera van elhelyezve a kamera állványon egymástól 42 cm-re, amelyek képesek 3 dimenziós felvételek készítésére. Mozgás közben a rover időközönként 3 dimenziós képeket készít, amelyek segítségével autonóm jelöli ki a megfelelő útvonalat. A CacheCam egy a mintavétel folyamatát rögzítő kamera, amely a mintavevő csövek megtöltését és lezárását figyeli.
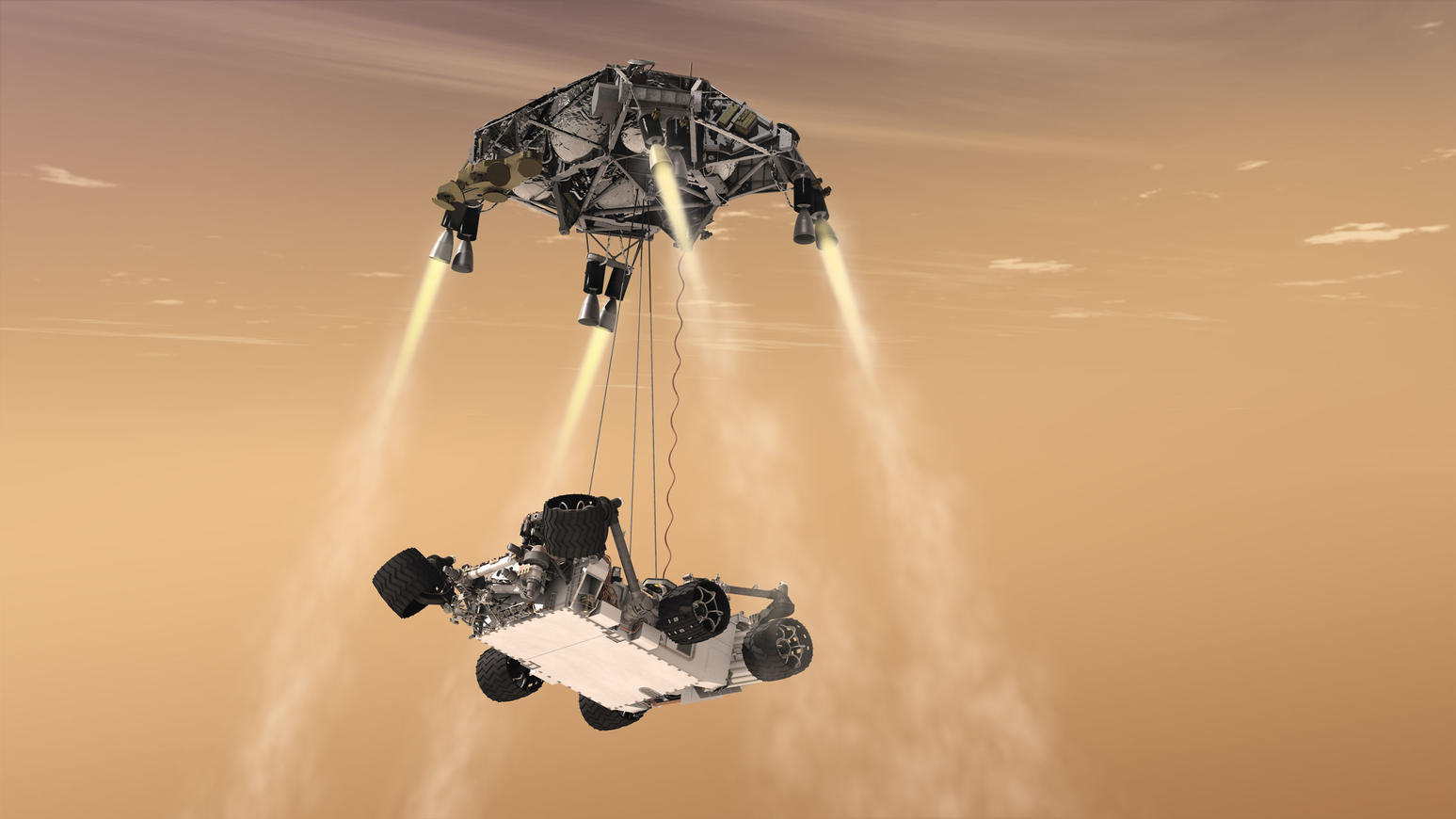
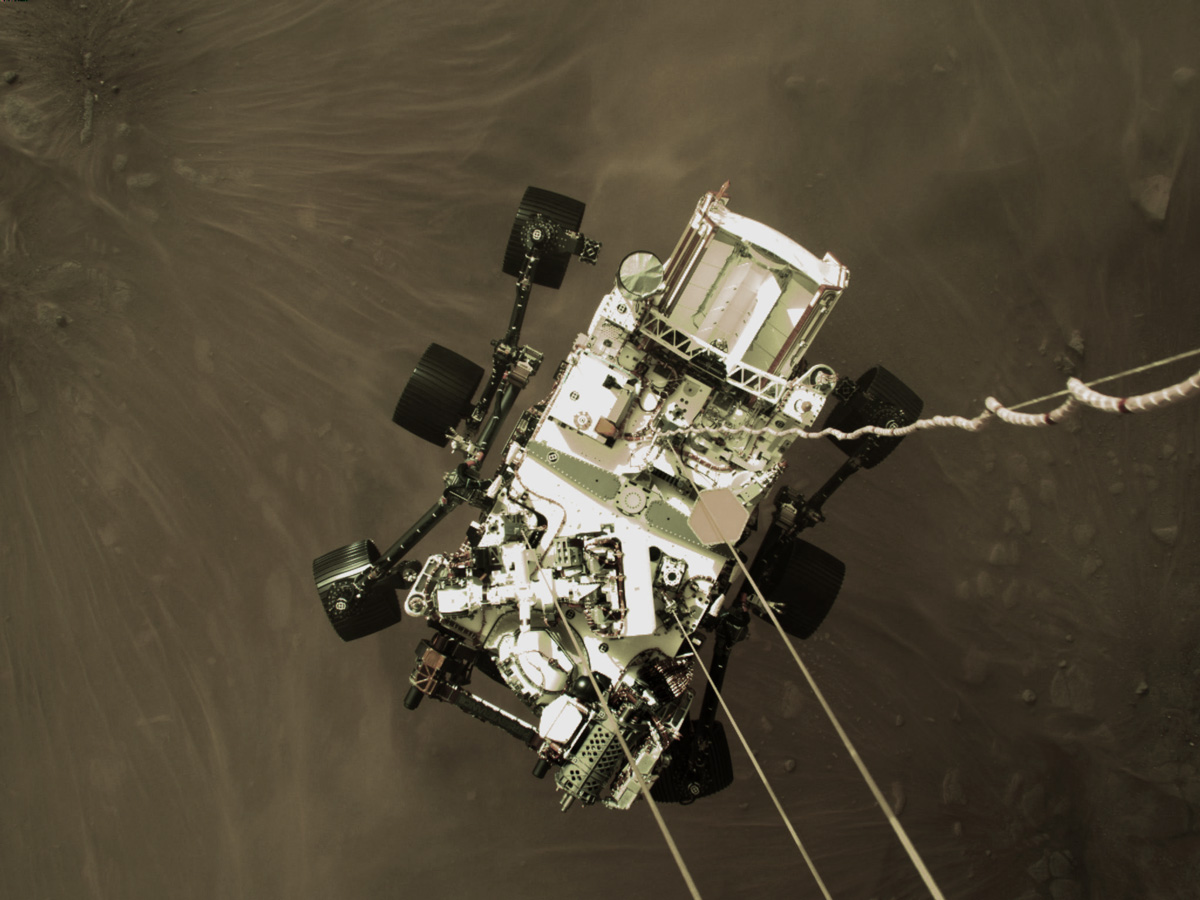
Illusztráció a Perseverance leszállásának utolsó szakaszáról, amikor a Mars felszíne fölött lebegő Égi daru
leszállófokozatról köteleken engedik le a rovert a talajra.
Forrás: NASA Mars Exploration Program
A Perseverance kamerák mellett mikrofonokat is visz magával, hogy először a történelemben hallani lehessen a marsi felszín hangjait. Ezelőtt két űrszonda is vitt magával mikrofonokat, de a Mars Polar Lander leszállás során megsemmisült, a Phoenix Lander mikrofonját pedig soha nem használták. A Perseverance-nak két mikrofonja van: az egyik a már említett SuperCam műszerhez tartozik, a másik az EDL mikrofon (Entry Descent and Landing), amely a leszállás során kialakuló hangokat rögzíti és a dán DPA Microphones gyártmánya. Mindezek mellett a roveren elhelyeztek egy 8 x 13 cm méretű kis plakettet a koronavírus terjedésesének megakadályozásáért harcoló egészségügyi dolgozók tiszteletére. Illetve három kis szilikon chipre lézerrel felírva, 10,9 millió ember nevét viszi magával a Perseverance, akik részt vettek a "Send Your Name to Mars" kampányban. A rovert szállító űrszonda a rovert és a leszálló fokozatot magába foglaló áramvonalas burkolattal ellátott leszálló egységből (Descent Stage) és a hozzá kapcsolt utazó fokozatból (Cruise Stage) áll. Az Égi Darunak nevezett leszálló fokozat feladata a leszállás utolsó szakaszában a jármű lefékezése és 20 méter magasságban lebegve a rover leengedése a talajra kötelek segítségével. A hő pajzs védi meg a rovert és az űrszonda többi részét a súrlódásból keletkező hőtől a légkörbe lépésnél. Az áramvonalas burkolatban helyezték el az ejtőernyőket, amelyek a légkörbe érve 1235 km/h-ról 320 km/h-ra lassítják le az űreszközt. Az utazó fokozat látja el energiával az űrszondát a Marsig tartó út alatt, valamint nyolc hajtóműve segítségével végrehajtja a pályakorrekciós manővereket és az űrszondát megfelelő irányba forgatását. A JPL-ben elkészített rover és az űrszonda további elemei 2020 februárjában egy C-17 teherszállító repülőgéppel érkeztek meg a floridai Kennedy Űrközpontba. Itt a roverről leszerelték az ideiglenesen felrakott kerekeket és megkezdődött a végső összeszerelés és ellenőrzés. Az eddig Mars 2020-nak elnevezett küldetés március 5-én kapta meg hivatalosan a Perseverance (Állhatatosság) nevet. A név kiválasztása a NASA eddigi elnevezési hagyományait követte, általános- és középiskolás diákok által beadott ötletek és az azokat megindokoló esszék alapján történt. A Perseverance név Alexander Mather virginiai hetedikes diák ötlete volt. A helikopter is kapott saját elnevezést, mint Ingenuity (Leleményesség), ami Vaneeza Rupani alabamai középiskolás diák javaslata volt. Március 30-án kapta meg a végleges kerekeit a rover, majd egy héttel később feltöltötték a leszálló fokozat négy hajtóanyag tartályát 401 kg-nyi hidrazinnal és a beszerelték az Ingenuity-t a tároló rekeszébe. Az összeszerelt rovert április 23-án egyesítették az Égi Daruval, április 29-én megkapta az áramvonalas burkolatot az ejtőernyőkkel együtt, majd összeszerelték az utazó fokozattal. A teljes űrszondát július 7-én helyezték el a rakéta tetején.
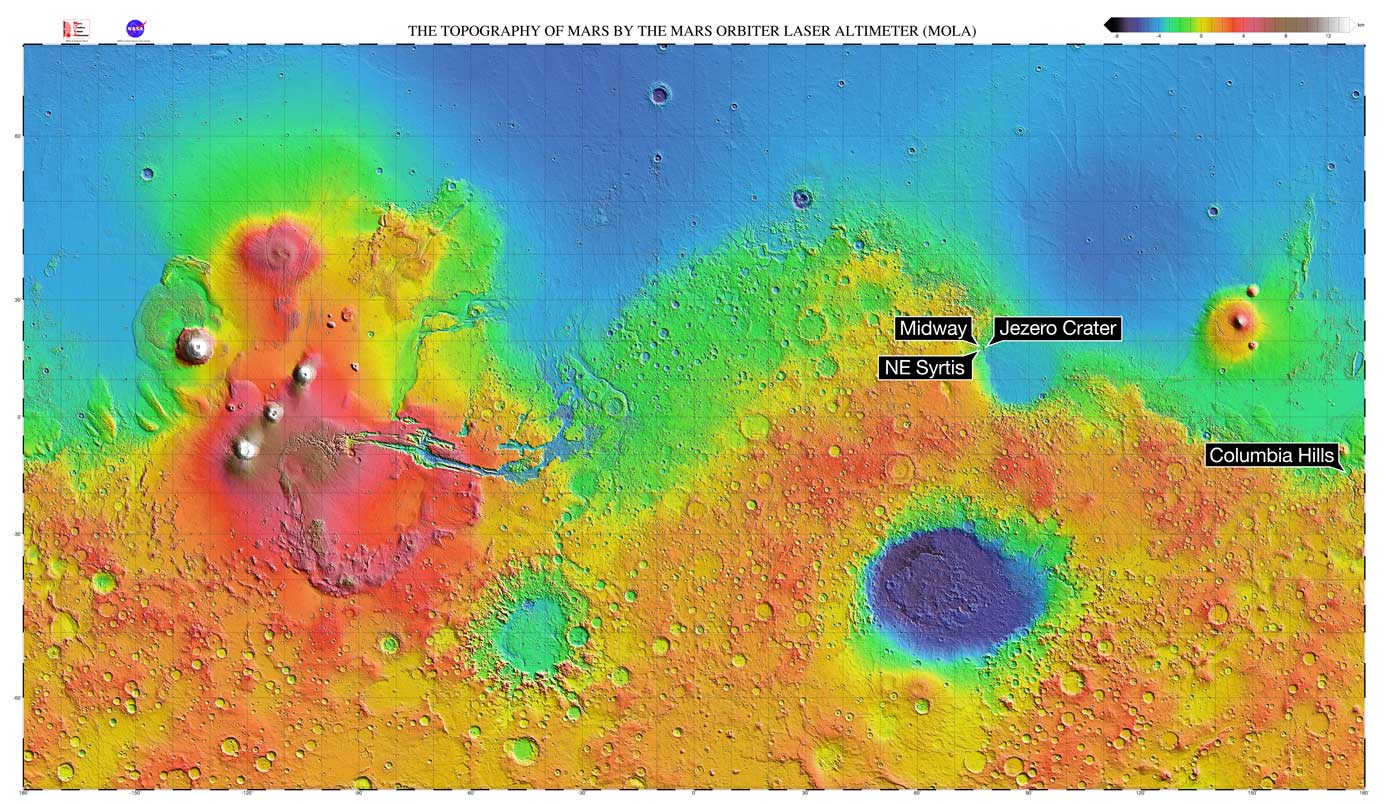
A négy finalista leszállóhely jelölt elhelyezkedése a Mars magasság szerint színezett térképén. Közülük végül a Jezero-kráter lett a befutó.
Forrás: NASA Mars Exploration Program
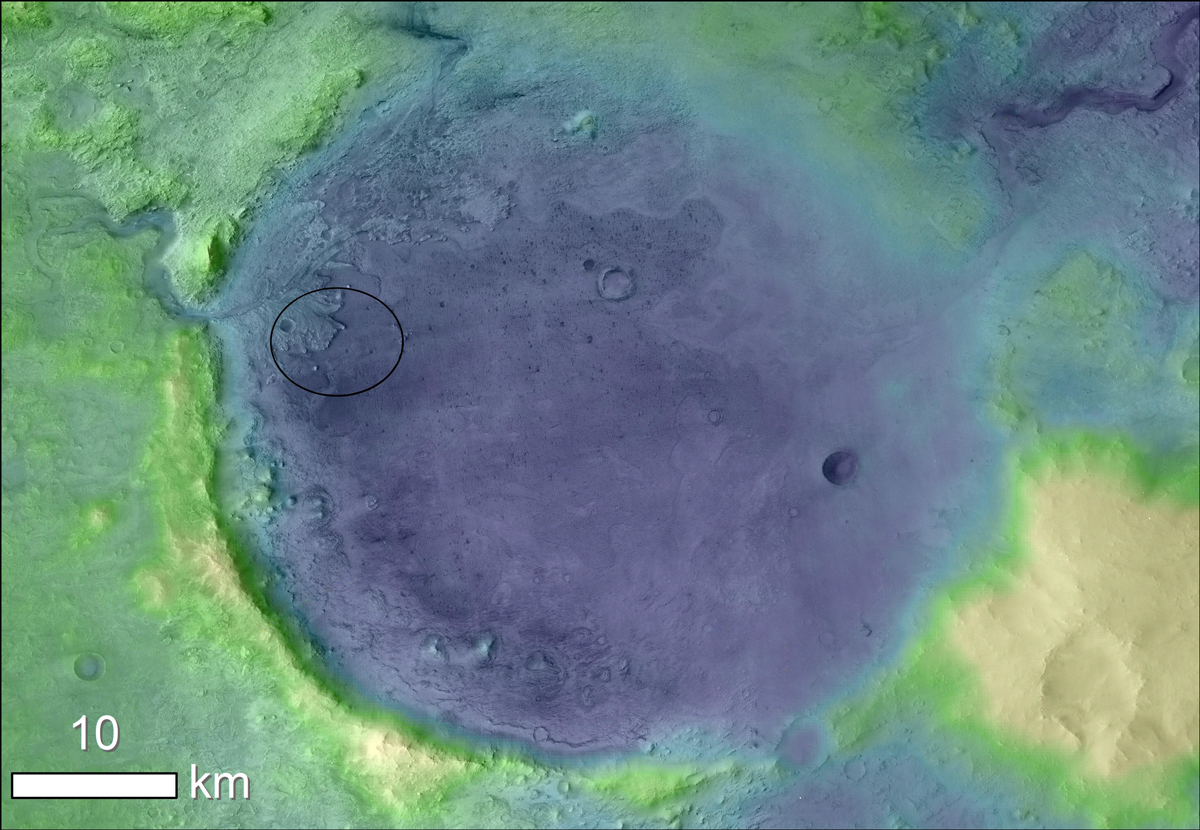
A Jezero-kráter magasság szerint színezett képe, amelyet a Mars Global Surveyor, a Mars Reconnaissance Orbiter és a Mars Express
űrszondák felvételei alapján készítettek. A világosabb színek a magasabb, a sötétebb színek az alacsonyabb területeket jelzik. A Perseverance
tervezett leszállóhelyét a fekete ellipszis által határolt terület jelzi, amely viszonylag közel fekszik a feltételezett és a képen is jól
látható egykori folyótorkolathoz.
Forrás: NASA Mars Exploration Program
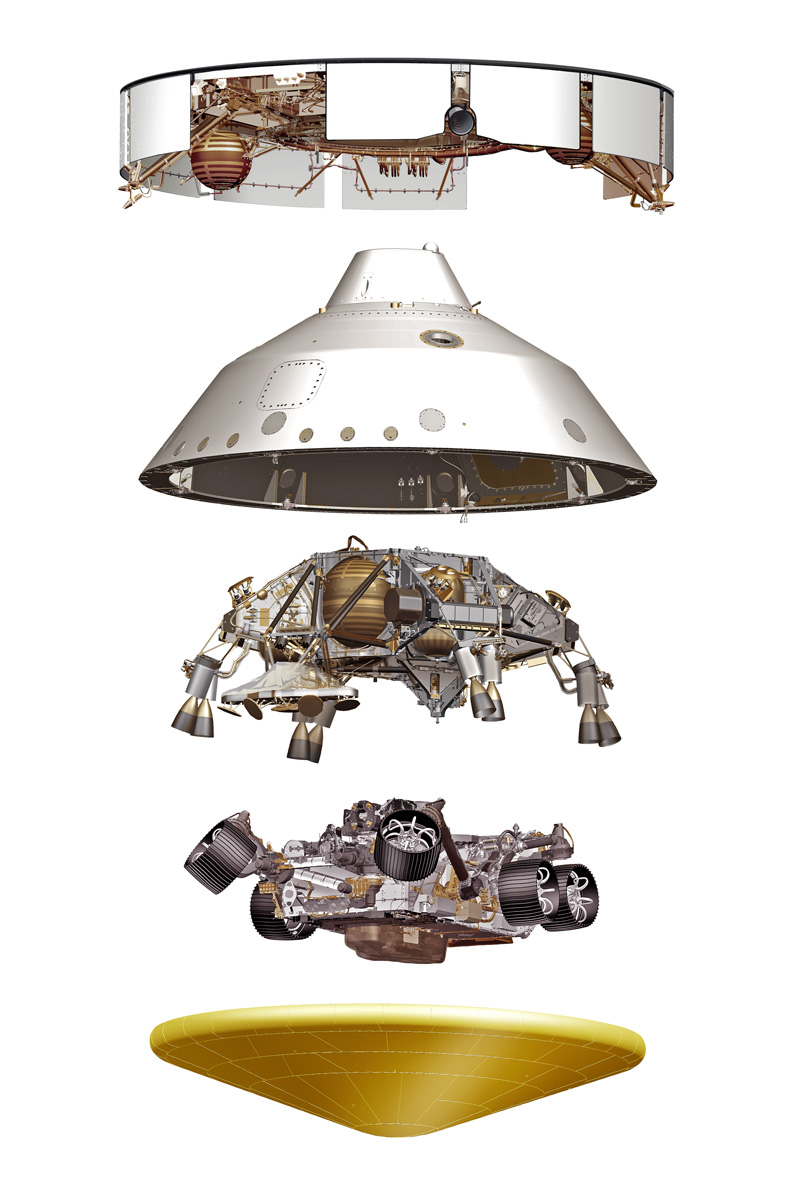
A rovert szállító űrszonda elemei: (elülről lefelé haladva) az utazó fokozat, az áramvonalas burkolat, az Égi daru, a rover és végül a hő pajzs.
Forrás: NASA Mars Exploration Program

A nem éppen kis méretű Centaur gyorsító fokozat, amely a Föld körüli pálya elhagyásához szükséges sebességet biztosítja a Perseverance-ot
szállító űrszondának, megérkezik a floridai Kennedy Űrközpontba.
Forrás: NASA Mars Exploration Program
Az indítási ablak július 17-én nyílt meg, de a fellövés többszöri halasztást szenvedett. Az első kijelölt nap, július 17-e, egy meghibásodott kiszolgáló daru miatt lett áttéve július 20-ra. Június 24-én jelentették be, hogy további halasztást szenved az indítás, a földi kiszolgáló berendezésekben talált szennyeződés miatt. A július 22-ére kitűzött startot végül 30-ra tolták át, mert a folyékony oxigén szenzorok hibás adatokat mutattak a feltöltési teszt során. Ekkor már a tetőfokára hágott az izgalom a program dolgozói között, mert az indítási ablak vége, augusztus 11-e vészesen közeledett. Ha nem sikerül 11-éig elindítani a Perseverance-t, akkor további két évet kellene várni a következő megfelelő alkalomra, amikor a Föld és Mars egymáshoz képest a lehető legjobb pozícióban van a leggyorsabb és legkevesebb energiát igénylő utazáshoz. Innentől kezdve azonban minden a tervek szerint ment. Július 22-én a rover megkapta a radioizotópos energiaforrást, majd 28-án egy 35 - 40 perces utazás után a hordozórakéta és a rover megérkezett az összeszerelő csarnokból (Vehicle Integration Facility - VIF) a 41-es indítóállásba. Eljött július 30-a és keleti parti idő szerint délután 4:50-kor az Atlas V rakéta, tetején a roverrel, felemelkedett az indítóállásból. A Kennedy Űrközpontban számos néző között Alex Mather és Vaneeza Rupani is élőben nézték végi a fellövést. A fellövéstől számított egy órán belül a Centaur gyorsító fokozat nyolc perces begyújtásával a Perseverance elindult a Mars felé. A gyorsító fokozattól való leválás után megkezdődött a hét hónapig tartó út. Miközben a rover haladt a célja felé az irányító központ munkatársai időközönként ellenőrizték az állapotát és kalibrálták a működését. A kommunikációs antenna és a napelemek megfelelő működése miatt időnként elforgatták az űrszondát, hogy a legmegfelelőbb szögben álljon a Földhöz és a Naphoz képest. A minél pontosabb pálya érdekében 5 pályakorrekciót hajtottak végre az út során; augusztus 14-én, szeptember 30-án, december 18-án, 2021. február 10-én és 16-án. Augusztus 7-én töltötték fel először és sütötték ki az Ingenuity akkumulátorait. 8 óráig töltötték őket a 35 %-os töltöttségi szint eléréséig, azután figyelték a teljesítményűket. November 9-én tesztelték az Égi Daru hajtóműveit, 10-én pedig a PIXL és a SHERLOC műszereket. November közepén és decemberben ötnapos felszíni munkavégzést szimulálva ellenőrizték a rover rendszereit. Az utazás utolsó 45 napjában pedig kommunikációs tesztekkel és leszállási szimulációkkal megkezdődött a felkészülés a leszállásra.

2020. július 30-án az Atlas V hordozórakéta felemelkedik a 41-es indítóállásból és a Perseverance útnak indul a Mars felé.
Forrás: NASA Mars Exploration Program
Február 18-án 480 millió kilométer megtétele után a Perseverance elérte a Marsot és megkezdődött a leszállás. A marsi légkör elérésekor a rover-t szállító űreszköz körülbelül 19 500 km/h órával száguldott. Miközben áthaladt a légkörön a hő pajzs több mint 1300 °C-ra izzott fel. A légkörbe lépéstől számított negyedik perc környékén kinyíltak az ejtőernyők, ezután levált a hő pajzs és elindult a Terrain-Relative Navigation program. A további ereszkedés során levált az áramvonalas burkolat az ejtőernyőkkel együtt és beindultak az Égi Daru fékezőhajtóművei, amelyek a maradék sebességet körülbelül 3 km/h-ra mérsékelték. A talajt érés előtt 20 méterrel az Égi Daruról köteleken leengedték a Perseverance-ot és a rover világidő szerint 20:55-kor az észak szélesség 18,4 ° és kelet hosszúság 77,4 ° koordinátájú ponton lágyan talajt ért. Az Égi Daru ezután elmanőverezte magát a rover felül és biztonságos távolságban becsapódott a felszínbe. Az egész folyamat nagyjából hét percig tartott, a Perseverance pedig ott állt a Mars felszínén, immáron ötödikként a NASA roverjei közül. A következő napokban az irányító központ munkatársai státusz ellenőrzéseket végeztek, illetve a rover elküldte az első képeket a Mars felszínéről, valamint február 20-án sor került az első hangfelvételek elkészítésére is. Az első felvételeken a rover által generált hangok mellett a marsi szél zúgását is hallani lehet. Az Ingenuity is jelezte a földi irányítás felé, hogy rendszerei tökéletesen működőképesek. Az irányító központ időszakosan végigellenőrizte mind a hét tudományos műszer működését. Március 2-án használták először a SuperCam lézerét, amikor egy Máaz-nak elnevezett szikla felületére tüzeltek vele. A keletkező hangot a SuperCam mikrofonja rögzítette és a hang alapján a Máaz bazaltra emlékeztető szerkezetű lehet. Március 3-án kinyitották a MEDA szél szenzorját. Egy nappal később először mozgatták meg és nyújtották ki robotkart. Március 5-én sor került az első teszt útra is, amely során a rover 6,5 métert tett meg nagyjából 33 perc alatt. Március 12-én lekerült a mintavevő rendszert takaró lemez, erről 13-án érkezett megerősítő fotó. Március 16-án a Perseverance észlelt egyet a Mars ritka porördögei közül. Az első hónap akklimatizálódása után a továbbiakban megkezdődött a kutatási program. Az első nagy feladat egy olyan helyet megtalálása volt, ahol az Ingenuity biztonságosan fel- és le tud szállni. A kis helikopter első repüléseit a Perseverance a MastCam-Z kamerarendszerrel és a mikrofonok segítségével fogja rögzíteni. Március 17-én a rover részletesen végigfotózta a Delta Lejtők nevű területet, ami a feltételezett folyódelta része. Az ittlévő sziklákat valószínűleg egy hatalmas áradás sodorhatta ide.

A Mastcam-Z által készített első 360 °-os panorámakép részletén a Jezero-kráter pereme látható a távolban. (Külön lapon megnyitva a kép tovább nagyítható.)
Forrás: NASA Mars Exploration Program
A Kodiak nevű szikla a Jezero-kráter Delta Lejtők nevű részén.
Forrás: NASA Mars Exploration Program

A Máaz nevű szikla, ami a Perseverance SuperCam lézerének első célpontja volt.
Forrás: NASA Mars Exploration Program
A Perseverance április 3-én dobta le az Ingenuity-t a felszínre. A kis helikopter számára az első nagy feladat a marsi éjszakai hideg túlélése volt. Az Ingenuity belső fűtése -15 °C-on tartja a helikopter belső berendezéseit, míg a külső hőmérséklet éjszaka elérheti a -90 °C-ot is. Április 8-án feloldották a rotorok lezárását, ezt követően már csak egy kissebességű és egy nagysebességű rotor teszt volt hátra az első repülésig. Az április 9-ei végső nagysebességű rotor teszt azonban nem azt az eredményt adta, amire a mérnökök vártak. A teszt során 2537 fordulat/percre kellett volna felpörgetni a helikopter rotorjait, a teszt azonban megszakadt, amikor a vezérlő szoftver át akart váltani repülés előtti módról repülési módra. A sikertelen teszt miatt az Ingenuity első repülését április 11-éről 14-re tolták át. A mérnökök számos megoldást sorba vettek és úgy döntöttek, hogy az Ingenutiy repülési szoftverének módosítás és a módosított változat felöltése lesz a legjobb. 30 sol állt a rendelkezésükre az ütemterv szerint, hogy repülésre bírják a helikopter, mielőtt a rovernek tovább kellene indulnia. Miközben az első repülésre várakozott, a Perseverance az Ingenuity-tól biztonságos, 270 méteres távolságban a környező sziklákat tanulmányozta. Később még egy héttel halasztották el a repülést a szoftver frissítése miatt. Végül április 19-én került sor az Ingenuity első repülésére. A történelmi repülés 39 másodpercig tartott, a helikopter 3 m magasságig emelkedett, majd visszasüllyedt a talajra. Ezzel az Ingenuity lett az első olyan ember alkotta repülő szerkezet, amely egy másik bolygó légkörben repült. A MOXIE berendezés április 20-án állított először elő oxigént a marsi légkörből. A MOXIE-t két óráig melegítették, majd egy órán keresztül oxigént termelt. Első éles működése során 5,4 g oxigént állított elő. Ez csak a kezdete volt egy három szakaszból álló kísérletsorozatnak. Az első szakaszban ellenőrzik és kalibrálják a MOXIE működését, a másodikban különböző légköri körülmények között működtetik majd, végül a harmadikban új üzemmódok tesztelésére kerül sor.
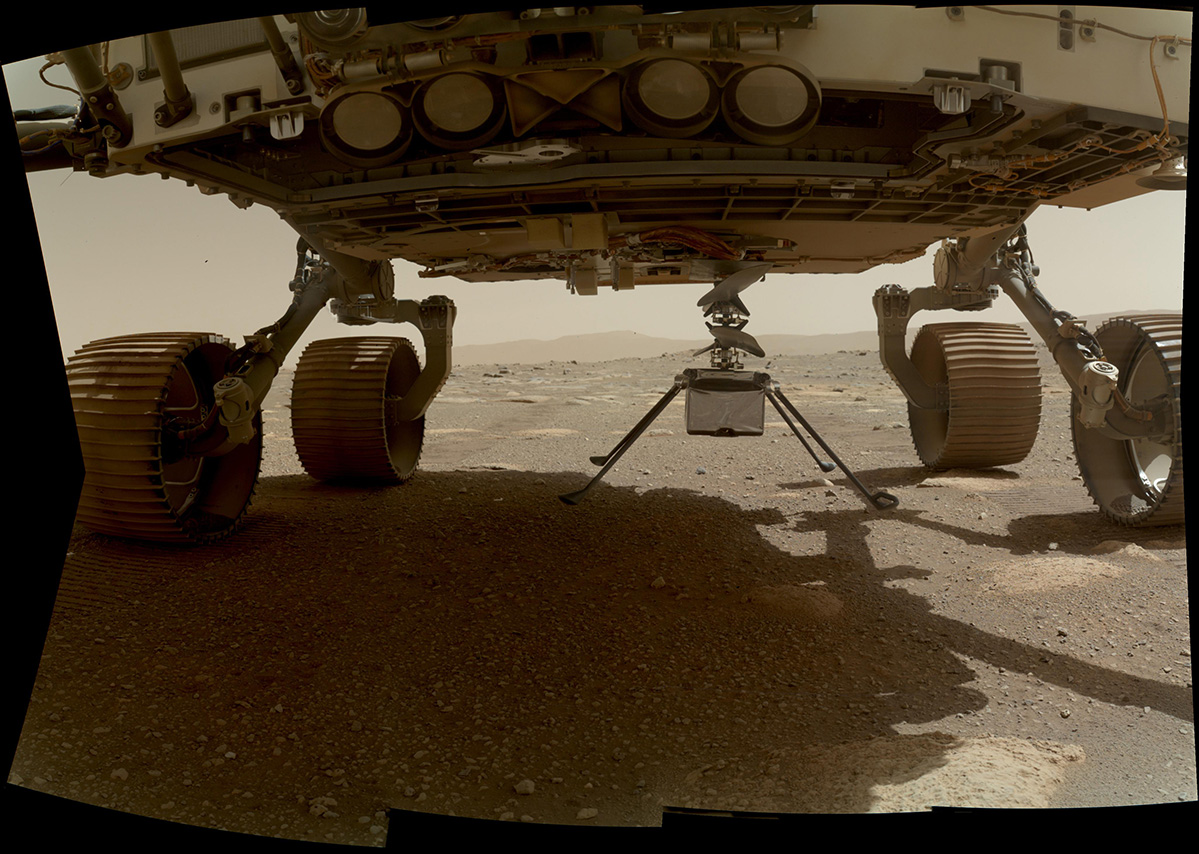
Az Ingenuity készen áll a felszínre való ledobására. A kis helikopter a rover hasára erősítve utazott egy védőborítás alatt,
amit a felszínre helyezés elött már korábban ledobott a Perseverance. Az oldalán fekvő helikoptert elöször kihajtották a rover alá,
majd kinyiltak a lábai és készen állt a felszínre helyezésre.
Forrás: NASA Mars Exploration Program
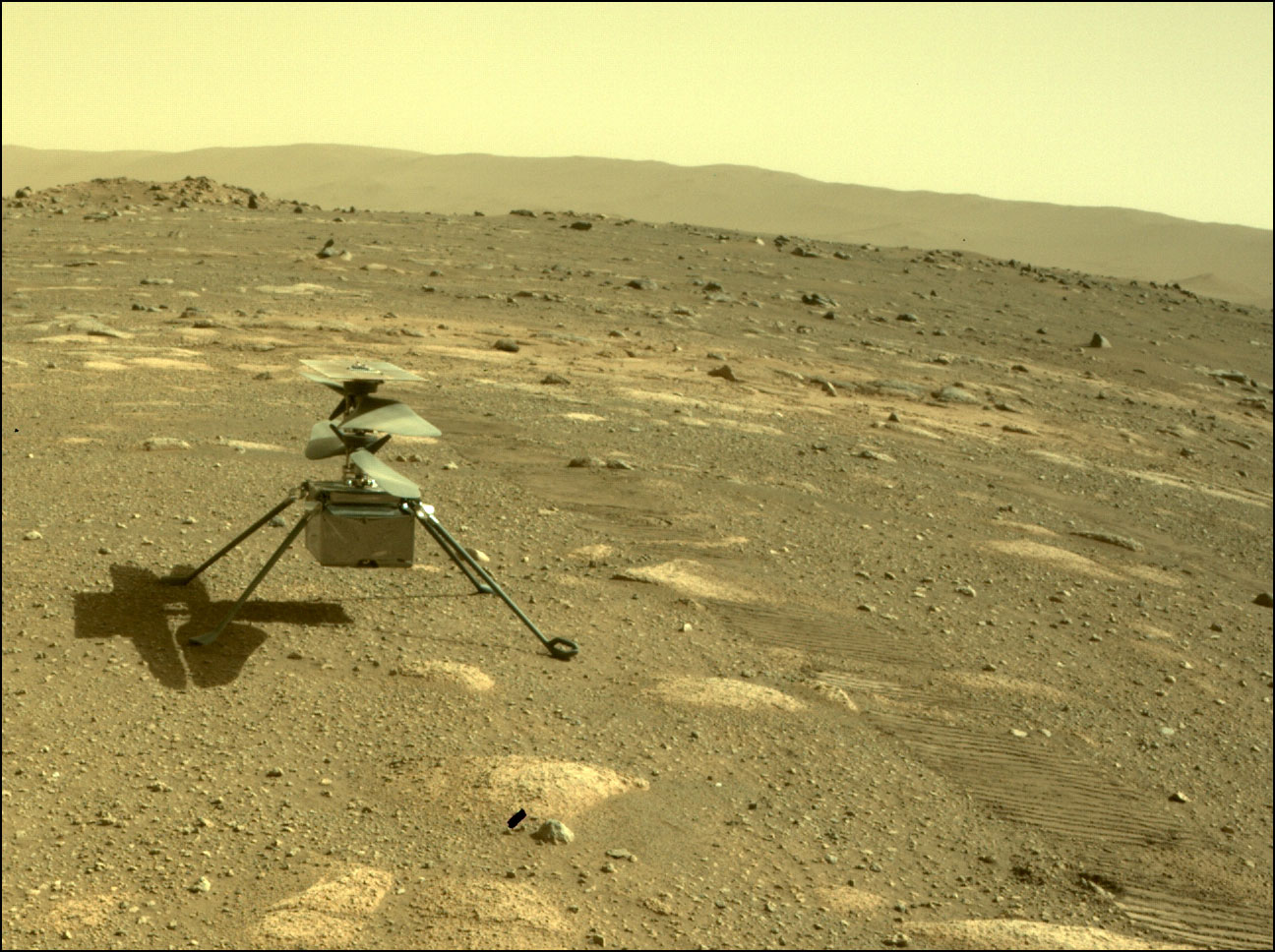
Az Ingenuity a Mars felszínén 2021. április 4-én.
Forrás: NASA Mars Exploration Program

Az Ingenuity lebeg a Mars felszíne fölött a második repülése során 2021. április 22-én. A kis helikopter volt az első ember alkotta szerkezet,
ami egy másik bolygó légkörében repülést végzett.
Forrás: NASA Mars Exploration Program
Áprilisban folytatódtak az Ingenuity repülési tesztjei, a második és a harmadik repülésen 5 m magasság és 50 m vízszintesen távolság elérése volt a cél. A helikopter harmadik repülésére április 25-én került sor, amely során összesen 100 m repült. Útközben 5 m magasan készített egy fotót a 85 méterre lévő Perseverance-ról. Májusban a Perseverance a Mastcam-Z képalkotó segítségével a környezetét és a Jezero-kráter fenekét vizsgálta. Eközben az Ingenuity befejezte 5 repülésből álló elsődleges programját, a sikeres repülések és a jármű állapota miatt pedig a program vezetősége úgy döntött, hogy meghosszabbítják azt. Az Ingenuity május 23-án teljesítette kiterjesztett programjának első repülését. A repülési terv az volt, hogy az Ingenuity 10 méterre emelkedik, 150 métert teszt meg délnyugat felé, 15 métert repül dél felé, majd 50 métert tesz meg északkeleti irányban mielőtt landolna. 54 másodperc repülés után azonban egy hiba lépett fel, ami a kamera és a fedélzeti számítógép között megakasztotta a fotók továbbítását. Egy fénykép teljesen elveszett a többi pedig nem megfelelő időben érkezett. A helikopter navigációs rendszere folyton a helytelen kép alapján módosította a jármű irányát, ami nagy kilengésekhez vezetett, az Ingenuity 20 °-ra is bedőlt és egekbe szökött az energiafelhasználása. Emiatt a helikopternek meg kellett szakítania a repülést, de szerencsére a hiba ellenére az Ingenuity sikeresen tudott landolni nem messze az előzetesen kijelölt leszállóhelyétől. Június elsején a Perseverance elérte a 100. solját a Marson. Ezalatt több mint 75 000 fényképet küldött a Földre, elkészítette az első marsi hangfelvételt, dokumentálta az Ingenuity első repülését, oxigént állított elő a marsi légkör szén-dioxidjából és megindult első vizsgálati területe felé.

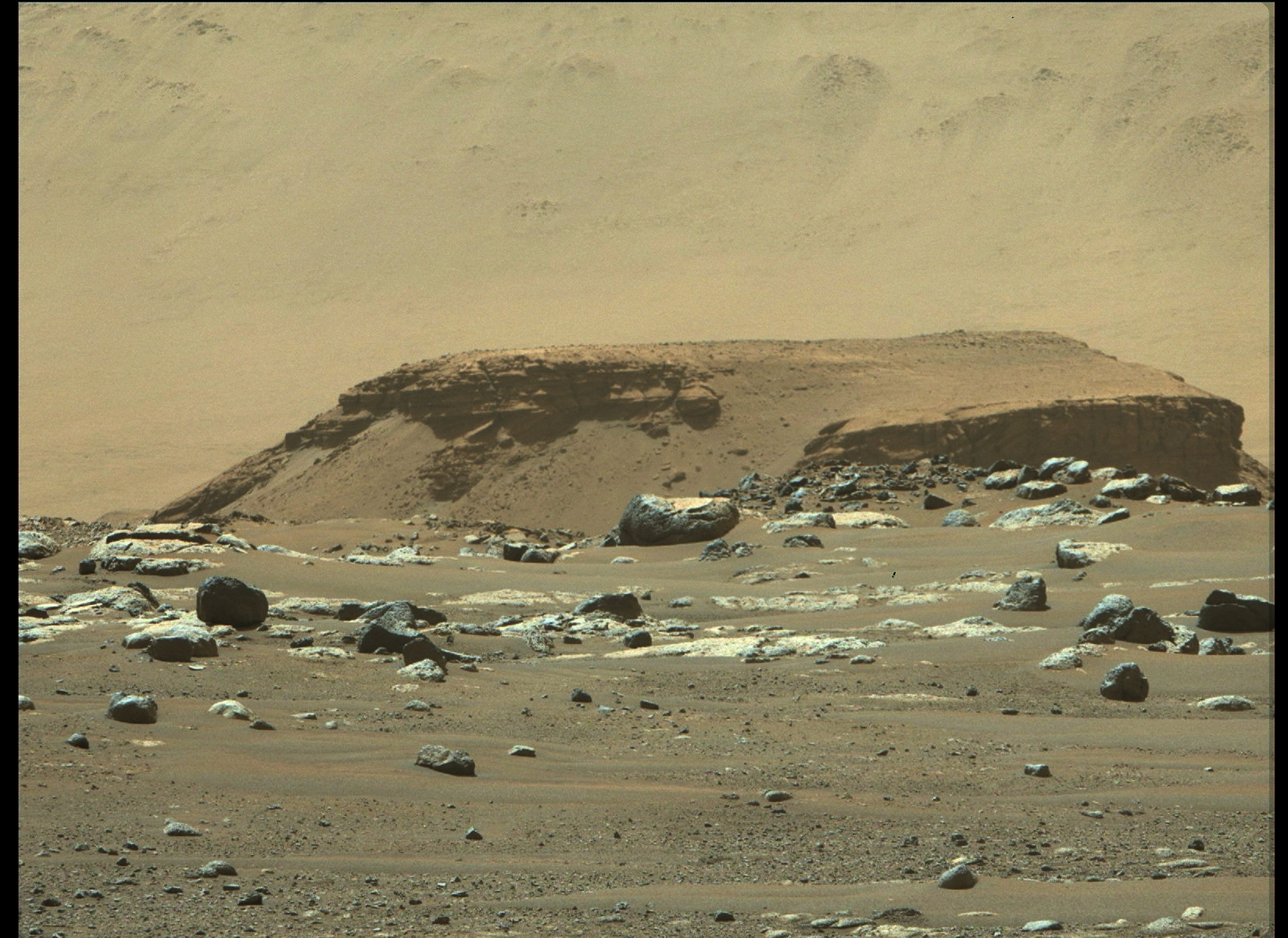
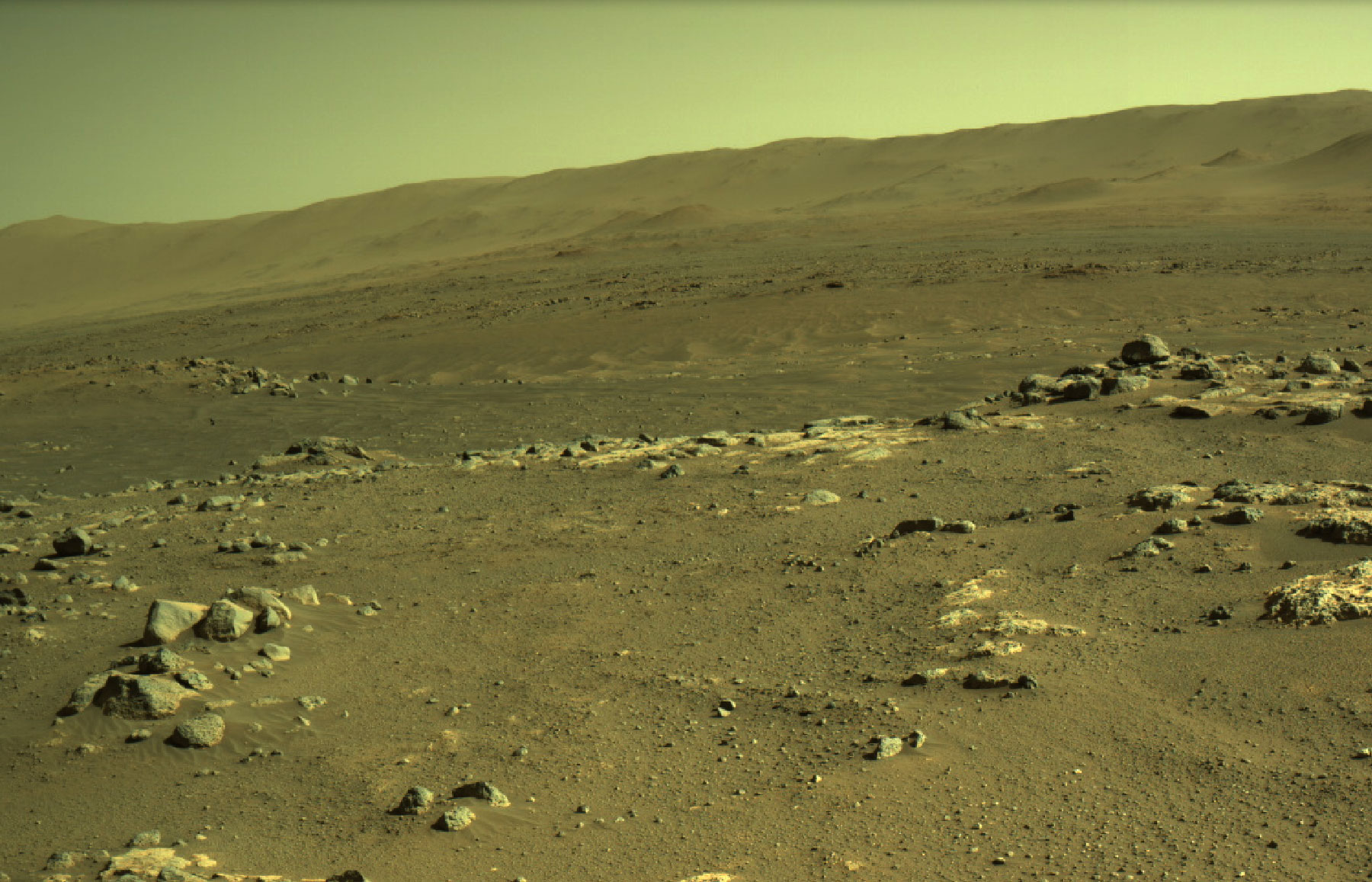
A Mastcam-Z fényképén egy nagyjából 2,5 km-re lévő domb, a Santa Cruz látható.
Forrás: NASA Mars Exploration Program
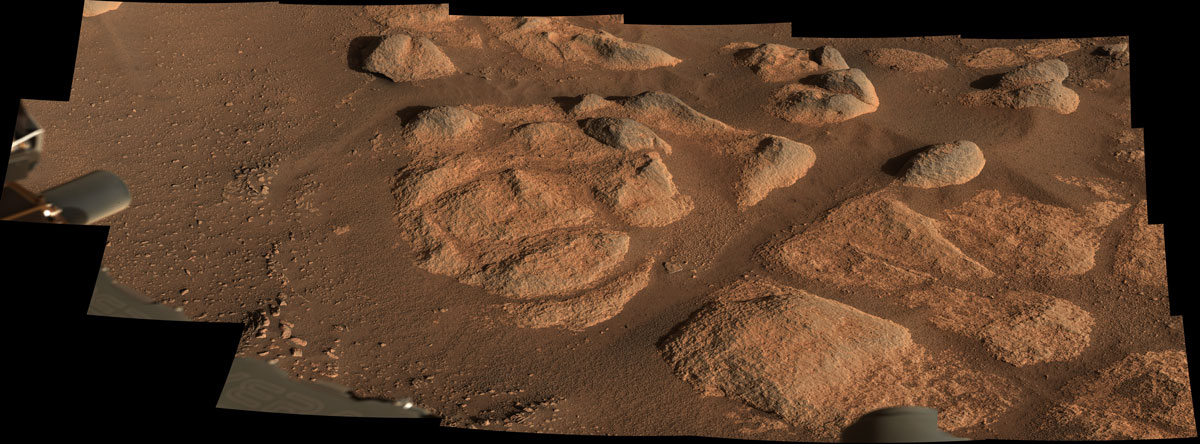
Sziklakibúvás a Mars felszínén.
Forrás: NASA Mars Exploration Program
A Perseverance első két kijelölt célpontja a Durván töredezett kráter fenék és a Séítah nevű területek voltak. Előbbit ősi kitakart aljzatkőzetek borítanak. A Séítah (a jelentése Navaho nyelven homok között) területet szintén aljzatkőzet borít és gerincek, illetve homokdűnék tarkítják. A program szakemberei azt feltételezik, hogy 3,8 milliárd évvel ezelőtt mindkét terület fölött legalább 100 méternyi víz hullámzott. A szakemberek négy helyszín jelöltek ki a két területen az elkövetkező mintavételek számára. Amint a Perseverance végez ezeknek a területeknek a vizsgálatával visszatér majd a leszállóhelyére, amit időközben a híres amerikai tudományos-fantasztikus írónő tiszteletére Octavia E. Butler állomásnak neveztek el. Ezt követően a rover észak-nyugat felé, a Jezero-delta irányába indul majd, amelytől azt remélik a szakemberek, hogy a földi folyódeltákhoz hasonlóan szerves anyagokat őrzött meg. Egy 4 négyzetkilométeres területet átvizsgálása utána a rover június 1-től kezdődően indult meg a Durván töredezett kráter fenék nevű terület felé, amit az első mintavétel helyszínének jelöltek ki. Ez a terület 900 méterre délre fekszik az Octavia E. Butler leszállóhelytől. Az Ingenuity kilencedik repülésére július 5-én került sor. A helikopter összesen 625 métert tett meg a repülés alatt, 166,5 másodpercig volt a levegőben és 18 km/h sebességet ért el. Az Ingenuity felderítőként is kiválóan teljesít, a kilencedik repülés alatt készített fotóin olyan felszíni képződményeket lehetett észrevenni, amik már túl kicsik az MRO űrszonda kamerája számára. A fotókon látható Kiemelkedő Gerincek nevű sziklás terület a szakemberek szerint korábban egy földalatti vízcsatorna lehetett, így potenciális jövőbeni célpontnak számít a rover számára. Az Ingenuity elrepült a Séítah homokdűnéi felett is, ahol a homok a fotók alapján túl mélynek tűnt. A rover AutoNav szoftvere képes kezelni a sziklákat és akadályokat, azonban a homokdűnék feladhatják neki a leckét. Az Ingenuity fotói ezért is nagyon értékesek, mert velük könnyebben lehet beazonosítani a potenciálisan veszélyes homokcsapdákat. Az Ingenuity július 24-én a 10. repülés során a Kiemelkedő Gerincek fölött repült 95 métert és rekordot jelentő 12 méteres magasságot ért el. Ez volt eddig a legkomplexebb repülés, amely 10 útjelző pontot érintett és 165,4 másodpercig tartott.
A Séítah terület.
Forrás: NASA Mars Exploration Program
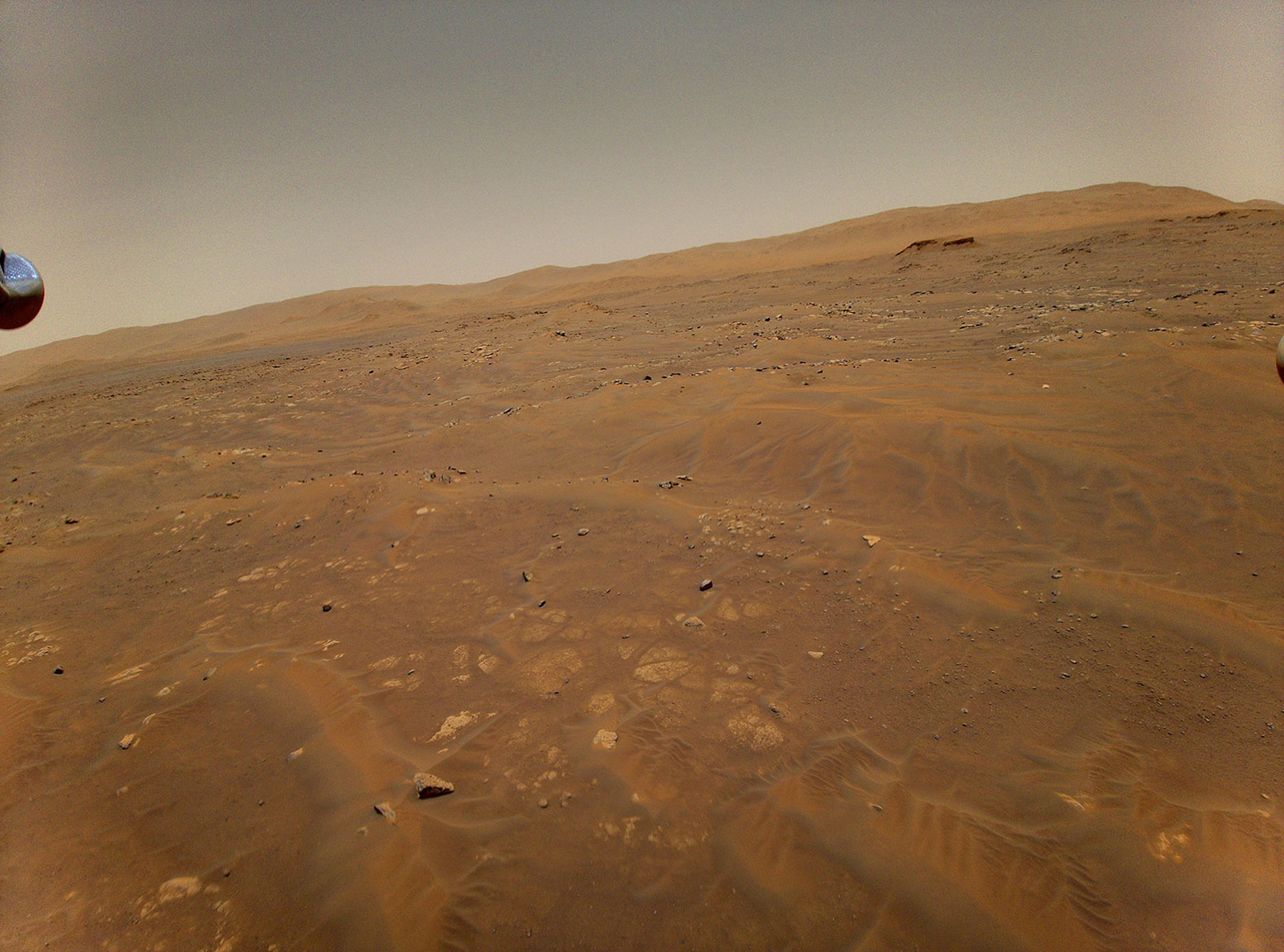
Az Ingenuity fotója a Seítah területről 10 méter magasságból.
Forrás: NASA Mars Exploration Program
Augusztus 6-án került sor a Perseverance az első fúrására és mintavételére a Durván töredezett kráter fenék nevű területen. Az első fúrási művelet azonban nem hozott sikert. A kijelölt szikla nagyon porózusnak bizonyult, emiatt a fúrás során a kifúrt mag valószínűleg szétporladt és nem tudott megmaradni a fúrószárban és nem is sikerült betölteni a mintavételi csőbe. Ezt igazolta a mintavételi csőről készített fotó és a cső térfogat ellenőrzése is. Ezt követően a rovert a Séítah terület déli része felé irányították, hogy itt tegye meg a második mintavételt. Augusztus 20-án sikerült lefényképezni a marsi égboltón tündöklő Deimos holdat. A 12,4 km széles kisméretű hold 23 458 km magasan kering a Mars felszíne fölött és 30 óránként tesz meg egy kört. A Phobos, a Mars második holdja 22 km átmérőjű és mindössze 9234 km kering a Mars körül. A csillagászok nagy többsége azon a véleményen van, hogy a két kis hold valaha aszteroidák lehettek, amiket a Mars gravitációja fogott be és kényszerített bolygó körüli pályára. Augusztus végén a rover 455 m megtételével a Citadelle nevű területre érkezett, ahol a sziklákon látszott, hogy jobban ellenállnak a szél eróziójának, azaz keményebb anyagból állnak, mint az első mintavétel területén lévő sziklák. A második mintavételi próbálkozás helyének a Rochette nevű sziklát jelölték ki. A rover előbb letisztította a Rochette felületét, 1 cm réteget leválasztva annak felületéről, majd szeptember 1-én megkezdődött a fúrás. A fúrás végén a fúrószárat és a mintavevő csövet megrázták, hogy az anyagminta beljebb kerüljön a csőben. Ezután elkészült mintát lefotózták, de a fotó túl sötét lett, emiatt 3-án megismételték a fotózást jobb megvilágítási körülmények között. A 3-ai fotó végül igazolta a sikeres mintavétel tényét. Augusztus 6-án a kifúrt minták átkerültek a mintavételi csőbe, amit a rover pedig hermetikusan lezárta. A lezárást egy CacheCam felvétel igazolta. Az Ingenutiy 13. repülésén szeptember 4-én felderítette a Séítah területet. A 160 másodpercig tartó repülés alatt a helikopter 210 métert tett meg és 8 m magasságot ért el. A helikopter navigációs szoftvere a sima területekhez jobban alkalmazkodik, ezért a területen lévő gerinchez érve az Ingenuity megállt és lebegett egy ideig, mielőtt továbbindult a gerinc felett. Ezt visszafelé is végrehajtotta. Ez a kis szünet segített a helikopternek jobban alkalmazkodni a felszínhez.

A Rochette nevű szikla, ahol az első sikeres mintavételre sor került.
Forrás: NASA Mars Exploration Program
A rover első mintavétele után szeptember 8-án elkészült a második is. A mintavételek közül az elsőt Montdenier-nek, a másodikat Montagnac-nak nevezték el. A minták előzetes vizsgálata azt mutatja, hogy a kifúrt szikla bazaltos lávából szilárdult meg. A sziklában sók is találhatók, amelyek vagy a víz elpárolgásából maradtak vissza, vagy a folyóvíznek és a sziklában lévő ásványi anyagoknak a reakciójából keletkeztek. A sziklában lévő módosulások azt mutatják, hogy a folyékony víz sokáig jelen volt ezen a területen. A Citadelle terület talán a legfiatalabb a Jezero-kráter fenekén lévők közül, a Séítah ennél jóval öregebb. Szeptember 15-től kezdve a rover Bastide nevű vékony rétegekből álló sziklakibúvást vizsgálta, majd október elején továbbhaladt a Séítah déli része felé, ami nagyjából 200 m van a Citadelle-től. Október elejéig a rover összesen 2,61 km-t tett meg. Október 2. és 16. között a Föld és a Mars a Nap átellenes oldalán helyezkedett el, a Nap kommunikációt zavaró hatása miatt pedig ezen időszak alatt a többi Marson lévő, vagy a bolygó körül keringő űrszondához hasonlóan a Perseverance programja is szünetelt. Az Ingenuity 14. repülési terve 5 méteres magasságon különböző oldalazó mozgások végrehajtását tartalmazta, azonban a marsi évszakok változása miatt az Ingenuity-nak megváltozott körülmények között kellett helytállnia. Az évszakváltás ugyanis magával hozta a légkör ritkulását is. A ritkább levegőben nagyobb rotor forgási sebességre volt szükség, ezért az Ingenuity rotorjait a repüléshez 2700 fordulat/percre pörgették fel. Ezt egy 2800 fordulat/perces teszt előzte meg a talajon, amely során azt vizsgálták, hogy hogyan bírja a szerkezet a nagyobb terhelést. A nagyobb forgási sebesség miatt a ritka légkörben a rotorok elérhetik a hangsebességet, amelynél leválik az áramlás a rotorokról és a helikopter felhajtóerő nélkül maradhat. Emellett a nagyobb forgási sebesség nem kívánt rezgéseket is eredményezhet, továbbá az energiaigény is megnő. A tesz végül pozitív eredménnyel zárult, így az Ingenuity október 24-én sikeresen teljesítette 14. repülését. November 6-án sor került az Ingenuity 15. marsi repülésre. Ekkor a rover távolságmérője 2,67 km mutatott. November 15-én a Séítah területen a rover egy zöldes olivinben gazdag sziklából kifúrta, majd a tartályba töltötte a harmadik mintát. A Séítah sziklarétegei valószínűleg a legidősebb kőzetek a Jezero-kráterben. Az Ingenuity november 21-én a 16. repülése során 116 métert tett meg 109 másodperc alatt. Az Ingenuity első repülései során a Wright fivérek mezője nevű területről indult és ide is érkezett vissza. Ahogy a rover közeledett az Octavia E. Butler leszállóhelyhez, az Ingenuity-t is elindult visszafelé a Wright fivérek mezeje felé. A 16. repüléssel egy lépéssel közelebb került a mezőhöz. November 24-én újjabb sikeres mintavétel során a Persverance az elöző, november 15-ei mintavétel szikláját fúrta meg ismét.

Napnyugta a 257. solon, 2021 november 9-én.
Forrás: NASA Mars Exploration Program
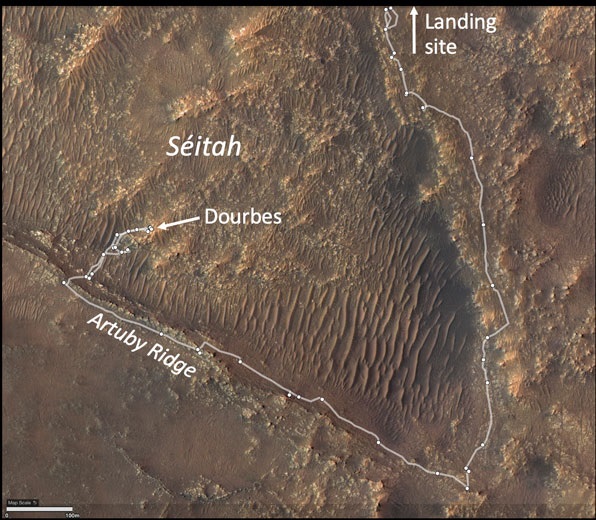
A Perseverance útvonala 2021 végéig.
Forrás: NASA Mars Exploration Program
2021 végéig a Perseverance-nak sikerült több fontos felfedezést is tennie. December 15-én a Perseverance misszióban részt vevő szakemberek az Amerikai Geofizikai Unió New Orleans-i találkozóján bejelentették, hogy a rover szénalapú szerves vegyületeket talált a Jezero-kráterben. A rover SHERLOC nevű műszere a rover által lecsiszolt sziklákban és a sziklákat borító porban is észlelt szerves vegyületeket. A szerves anyagok élő és élettelen folyamatok útján is létrejöhetnek. A Séítah terület déli részén a lecsiszolt kövekben a PIXL műszer nagy mennyiségű olivint és piroxént észlelt. A Perseverance eddigi megfigyelése azt sugallják, hogy az ősi Jezero-tó 100 méterrel mélyebben helyezkedett el, mint azt korábban a Mars körüli pályán keringő űrszondák adatai alapján következtették. Hosszú ideig, több millió évig egy folyó folyt a Jezero-tóba. A Mars nagy kiszáradása nagyjából 3,5 milliárd évvel ezelőtt kezdődhetett meg, amikor a bolygó mágneses mezője megszűnt és az akkor még sűrű légkört a napszél egyszerűen elkezdte lehántani. A rover eddig ötórányi hanganyagot rögzített. Közöttük van szélzúgást, a rover menet közbeni zajait és a lézernyaláb hangját tartalmazó felvétel is. A Marson felvett hangokat erős basszus kíséri, a vékony légkör miatt pedig a magas hangokat nem hallani. Április 30-án nagy meglepetésre sikerült rögzíteni a 80 m lévő Ingenuity rotorjainak hangját is. A Perseverance és az Ingenuity 2022-ben is folytatják munkájukat a Marson, további eredményeikről a sorozat egy későbbi részében lesz szó.
- NASA Mars 2020 Mission Perseverance rover
- Trailblazing Mars helicopter attached to Perseverance rover for July launch
- NASA's next Mars rover is just one month away from launch
- Launch of NASA's next Mars rover delayed again by 'contamination concern' on the ground
- Mars 2020: The hunt for life on the Red Planet is about to get serious
- NASA powers up Ingenuity Mars helicopter in space for the 1st time
- The first interplanetary helicopter is on its way to Mars
- NASA will reveal the new name of its Mars 2020 rover on Thursday
- NASA's Mars Helicopter makes last spin on Earth before before July launch
- NASA has built a helicopter to explore Mars and it's finally ready to launch
- Meet Ingenuity: Alabama teen names NASA's pioneering Mars Helicopter
- NASA delays launch of next Mars rover to no earlier than July 30
- NASA's next Mars rover carries tribute to healthcare workers fighting coronavirus
- NASA's next Mars rover rolls out to launch pad atop Atlas V rocket
- Teens who named Mars rover and helicopter are 'over the moon' following launch
- The 1st-ever Mars helicopter will start flying next year. Here's how.
- NASA's next Mars rover will land in less than 100 days
- 100 days from launch: NASA's Mars rover Perseverance gets its wheels, parachute
- NASA starts packing Mars rover Perseverance ahead of July launch
- Going nuclear: NASA's Perseverance Mars rover gets its power source for July 30 launch
- NASA's Mars 2020 Perseverance rover will use some of the best Martian maps ever made
- Meet 'Perseverance': NASA's Mars 2020 rover has a new name
- NASA's Mars rover Perseverance rover has a hidden message for the Red Planet
- What's in a name: Why NASA chose 'Perseverance' for its next Mars rover
- NASA's Perseverance Mars rover will carry 10.9 million names to Red Planet
- NASA's Mars rover Perseverance still on track for July launch despite coronavirus outbreak
- Touchdown! NASA’s Perseverance Rover Lands on Mars to Begin Search for Past Life
- Ready for Mars: Perseverance Counts Down to Thursday Launch (Part 1)
- Ready for Mars: Perseverance Counts Down to Thursday Launch (Part 2)
- Getting Closer! NASA’s Perseverance Rover Less Than 100 Days From Landing on Mars
- NASA's Mars helicopter Ingenuity touches down on the Red Planet
- Mars helicopter Ingenuity unlocks its rotor blades to prepare for 1st flight on Red Planet
- These selfies of NASA's Mars helicopter with the Perseverance rover are just amazing
- NASA delays Mars helicopter Ingenuity's 1st flight to April 14
- As NASA troubleshoots its Mars helicopter, Perseverance rover keeps busy
- NASA's Mars helicopter Ingenuity takes off on historic 1st powered flight on another world
- NASA's Perseverance rover makes oxygen on Mars for 1st time
- Mars helicopter Ingenuity spots Perseverance rover from the air (photo)
- NASA's Perseverance rover on Mars has found some mysterious rocks (photos)
- Mars helicopter Ingenuity experiences anomaly on 6th flight, but lands safely
- Perseverance rover marks 100th Mars day on the Red Planet
- NASA's Perseverance rover begins 1st science campaign on Mars
- NASA's Perseverance rover is taking its own wheel for Mars drives
- Mars helicopter Ingenuity spotted a 'heart' in Perseverance rover's tracks on 9th flight (video)
- New photos from the Mars helicopter Ingenuity's 9th flight help refine Perseverance rover science goals
- Watch NASA's Mars helicopter Ingenuity explore intriguing Raised Ridges in new video
- NASA's Perseverance rover gears up to capture its 1st Mars rock sample
- 1 year after launch, NASA's Perseverance rover prepares to collect 1st sample on Mars
- Perseverance rover drills into Mars for 1st time in milestone for sample collection
- Perseverance Mars rover fumbled 1st sampling attempt because of 'unique' powdery rock, NASA finds
- Perseverance rover spots tiny Mars moon Deimos (video)
- Perseverance Mars rover gearing up for 2nd rock sampling attempt (photos)
- Mars rover Perseverance set for 2nd sample-collection attempt (photo)
- NASA's Perseverance rover drills 1st Mars rock sample for an (eventual) return to Earth
- Perseverance rover seals up 1st Mars sample for future return to Earth
- NASA's Perseverance Rover Collects Puzzle Pieces of Mars' History
- NASA's Perseverance rover getting ready to snag 2nd Mars sample
- NASA's Perseverance Mars rover snaps an epic selfie along with 'mission-critical' views of Red Planet
- Perseverance rover on Mars spotted from space in striking new satellite image
- Perseverance rover confirms existence of ancient Mars lake and river delta
- Hear sounds from Mars captured by NASA's Perseverance rover
- Perseverance rover on Mars bites into layered rocks in hunt for clues of ancient water
- NASA's Perseverance rover on Mars just collected its 3rd sample of the Red Planet (photos)
- Watch Ingenuity Mars helicopter soar in amazing new videos from Perseverance rover
- Flying on Mars getting tougher as Ingenuity helicopter gears up for 14th hop
- Mars helicopter Ingenuity soars on 16th Red Planet flight
- NASA's Perseverance rover on Mars just snagged its newest rock sample (photos)
- NASA's Perseverance rover finds organic chemicals on Mars
Kapcsolódó írások
Kerekeken a Naprendszerben 1.
A Lunohod holdjárók
Kerekeken a Naprendszerben 9.
A MINERVA aszteroida roverek