Kerekeken a Naprendszerben 11. rész
A Csuzsung
1997 és 2020 között a NASA roverjei gyakorlatilag egyeduralkodók voltak a Mars felszínén. 2021 májusában azonban megszűnt az amerikai rover hegemónia, amikor a Tienven 1 űrszonda leszállóegysége sikeres leszállást hajtott végre az Utopia Planitia-n fedélzetén a Kínai Népköztársaság első marsjárójával, a Csuzsung-gal. A Jütu roverek tapasztalataira építő új kínai rover az első olyan nem-amerikai jármű, ami eljutott a vörös bolygóra. A Csuzsung tudományos tevékenysége nyomán várhatóan jobban megismerjük majd az Utopia Planitia és vele együtt a Mars történetét is.
A 2000-es évek elejétől kezdve robbanásszerűen fejlődő kínai űrkutatás a sikeres Csang’o holdszonda program tapasztalataival felvértezve a 2010-es évek elején tovább lépett és belefogott a Mars kutatásába. Elsőként a Kínai Űrügynökség részt vett az orosz Roszkozmosz űrügynökség Phobos-Grunt programjában. A Phobos-Grunt egy Zenit-2SB41 hordozórakéta segítségével indult a Mars felé 2011-ben. Az orosz űrszonda az együttműködés keretében magával vitte a Jinghuo 1 nevű kínai űrszondát is, amely a tervek szerint a bolygó körüli pályáról vizsgálta volna a Mars légkörét, ionoszféráját és mágneses mezejét. A két űrszonda sikeresen elérte az alacsony Föld körüli parkoló pályát, azonban a hordozórakéta utolsó, Fregat nevű gyorsító fokozata egy hiba miatt nem tudta elvégezni a Mars eléréséhez szükséges két gyorsító manőver egyikét sem, így az űrszondák a parkoló pályán ragadtak, majd a légkör fékező hatásának köszönhetően 2012-ben visszazuhantak a Földre. A folytatásban Kína teljesen önállóan folytatta marskutatási programját. A Tienven programot 2016-ban jelentette be a Kínai Űrügynökség. A Tienven név utálás Csü Jüan (Élt K.e. 343 és 278 között) - az egyik leghíresebb kínai költő - azonos című művére, a jelentése mennyeknek föltett kérdések, a végső igazságok keresése. A program első repülése, a Tienven 1 egyedülálló kettős céllal indult; keringőegysége Mars körüli pályáról vizsgálja majd a bolygót, leszállóegysége pedig a felszínre juttat egy rovert. Erre az összeállításra - keringőegység, leszállóegység és rover együtt - korábban egy misszió keretén belül sem került még sor. A Tienven 1-nek ezen kívül még egy fontos feladata van, tesztútként egy későbbi küldetés számára kell kikövezni az utat. Kína a 2020-as évek vége felé marsi kőzetek Földre történő vissza hozatalát tervezi, ehhez a programhoz pedig a Tienven 1 repülése az első lépés.
Szerkezeti szempontból a Tienven 1 űrszonda két fő részre bontható; a keringőegységre és a leszállóegységre. A keringőegység alapja egy hatszög alapú hasáb. A hasáb oldalain egymással szemben két kinyitható napelem szárny került elhelyezésre. Ezek szolgáltatják a keringőegység energiáját, amelyet a hasáb belsejében elhelyezett akkumulátorok tárolnak. A hasáb oldalán helyezkednek el a kommunikációs antenna és a Mars vizsgálatát végző műszerek. A hasáb tetejéhez kapcsolódik a leszállóegység, alján pedig a pályamódosítási manővereket és a marsi fékezést végrehajtó hajtómű található. A keringő egység hét darab tudományos műszerrel van fölszerelve; egy közepes- és nagyfelbontású kamerával, egy felszínt vizsgáló radarral, egy ásványtani spektrofotométerrel, egy magnetométer, egy ion- és semleges részecske analizátorral és egy töltött részecske analizátorral. A műszerek munkáját egy irányító egység felügyeli, ami egy busz rendszeren keresztül energiával és parancsokkal látja el a műszereket, figyeli a hőmérsékletszabályozást, begyűjti a műszerek adatait és feldolgozza azokat. Az irányító egység folyamatosan figyeli a műszereket, hiba esetén képes a probléma feltárására, elszigetelésére, a rendszer visszaállítására vagy újrakonfigurálására.
A közepes felbontású kamera (Moderate Resolution Imaging Camera, MoRIC) feladata a marsi topográfia és geomorfológia feltérképezése. A MoRIC egy nagylátószögű kamera, amely kétdimenziós és háromdimenziós képeket is képes készíteni, 4096 x 3072 pixel felbontással rendelkezik és a 430-690 nm hullámhossz tartományban képes érzékelni. A nagyfelbontású kamera (High-Resolution Imaging Camera, HiRIC) szintén a marsi topográfia és geomorfológia felderítésében vesz részt. A műszer TDI-CCD érzékelővel rendelkezik. Működése során vonal letapogatással színes, illetve spektrális (színképvonalas) képeket készít. A rover landolása előtt részt vesz a leszállási zóna felderítésében. A felszínt vizsgáló radar (Mars Orbiter Scientific Investigation Radar, MOSIR) feladata a marsi topográfia és geomorfológia feltérképezése, a felszín alatt előforduló vízjég felderítése, a talaj összetételének meghatározása, valamint a marsi ionoszféra és bolygóközi környezet feltérképezése. A radar frekvencia modulációval dolgozik, alacsonyabb frekvenciájú (10-20 MHz) és nagyobb frekvenciájú (30-50 MHz) rádiójeleket bocsát a felszínre, a visszaverődő jeleket pedig széles dipolus antennáival észleli. Képes HH, azaz vízszintes adás - vízszintes vétel és HV, azaz vízszintes adás - függőleges vétel polarizációs módban dolgozni. A Marsig tartó repülés során a MOSIR VLF vevője képes érzékelni a bolygóközi alacsony-frekvenciás elektromágneses hullámokat is. Az ásványtani spektrométer (Mars Mineralogical Spectrometer, MMS) a Mars felszínének ásványi és kémiai összetételét képes meghatározni. A műszer tulajdonképpen egy három darab tükörrel rendelkező teleszkóp, amely képes spektroszkópikus szenzorjaival a különböző elemek által kibocsátott fény színképelemzésére. Felbontása térben 512 pixel, spektrális dimenzióban 576 színcsatorna. A magnetométer (Mars Orbiter Magnetometer, MOMAG) feladata a marsi ionoszféra és bolygóközi környezet feltérképezése, illetve a marsi ionoszféra és a napszél kölcsönhatásának vizsgálata. Egy rúdon van elhelyezve és két fluxgate típusú szenzorból áll, ez a felépítés segít kiszűrni az űrszonda által generált mágneses indukció zavaró hatását. A MOMAG méréstartománya +-2000 nT, felbontása 0,01 nT. Az ion- és semleges részecske analizátor (Mars Ion and Neutral Particle Analyzer, MINPA) feladata az alacsony töltésű és a töltés nélküli részecskék detektálása a marsi ionoszférában és bolygóközi környezetében, illetve annak a kérdésnek a meghatározása, hogy töltés nélküli részecskék gyorsító hatása milyen hatással van a légkör megszökésére. Ionizációs tányérjával képes ionizálni a töltés nélküli részecskéket. A töltött részecske analizátor (Mars Energetic Particles Analyzer, MEPA) elektronok, protonok, alfa-részecskék, nehéz ionok detektálására képes, emellett méri az energiaspektrum, a részecske összetétel és fluxus változását a Marshoz közeli- és a bolygóközi térben, valamint feltérképezi töltött részecske sugárzás térbeli összetételét. Egy teleszkópból és részecske detektorokból áll, 0,1 - 12 MeV energiájú elektronokat, 2 - 100 MeV energiájú protonokat és 25 - 300 MeV energiájú nehéz ionokat képes érzékelni.
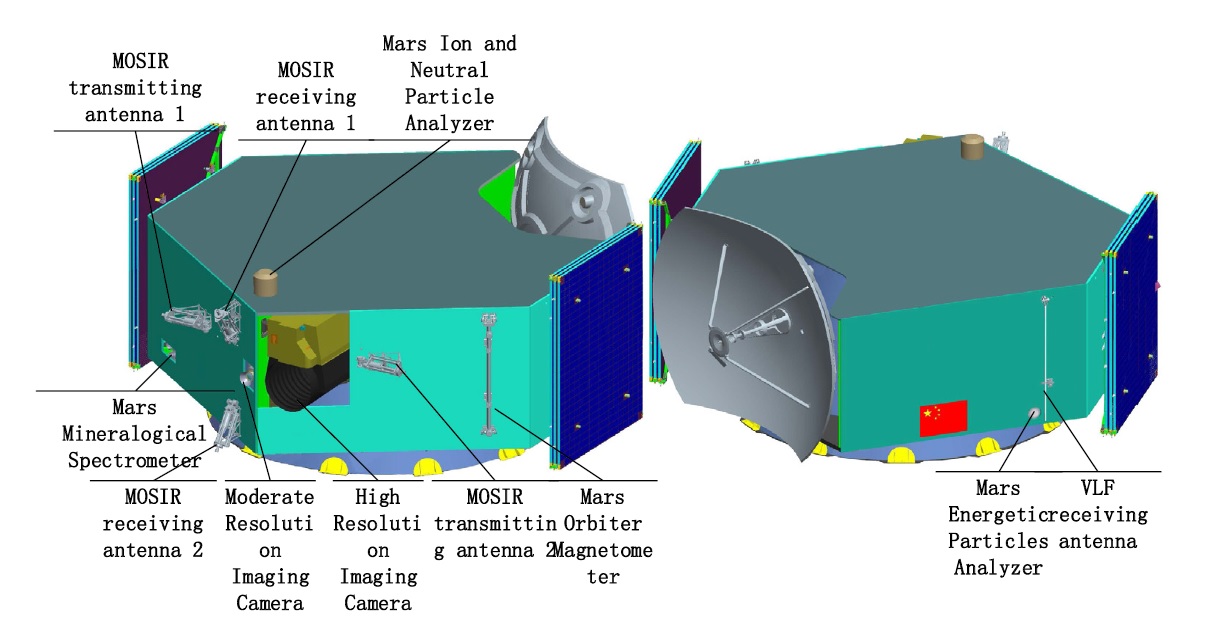
A Tienven 1 keringőegységén elhelyezett műszerek.
Forrás: Scientific objectives and payloads of Tianwen-1, China’s first Mars exploration mission
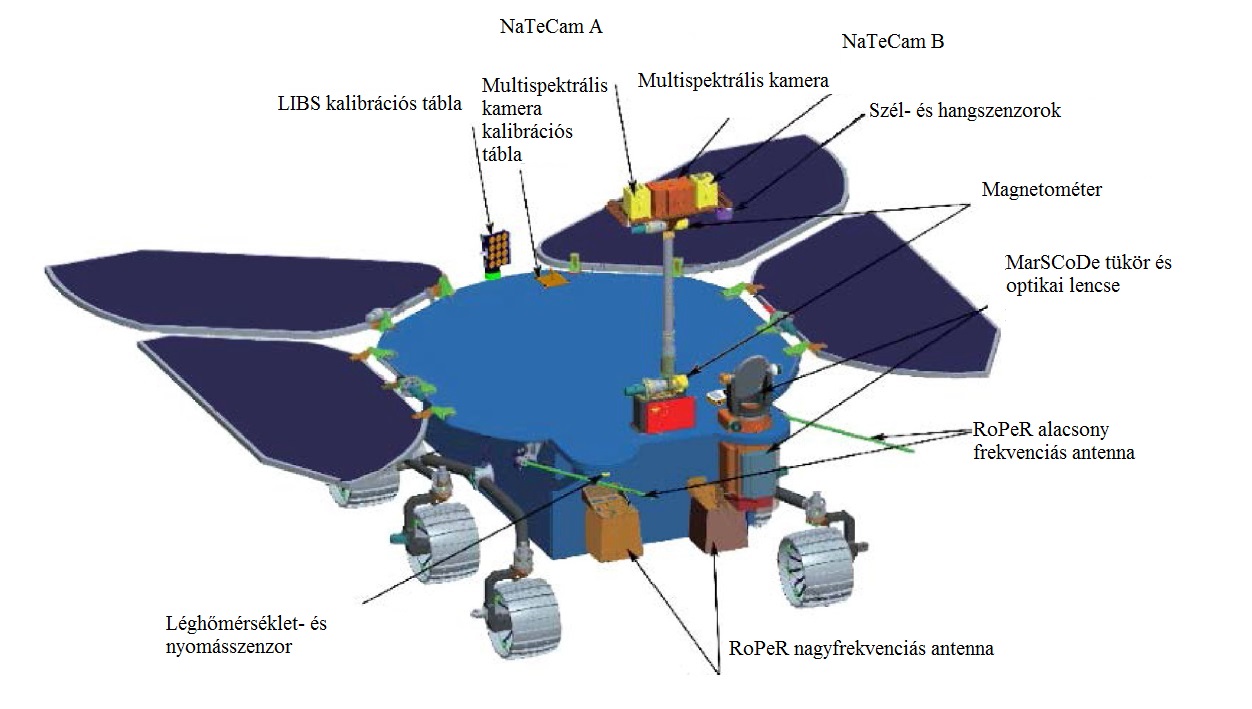
A roveren elhelyezett műszerek.
Forrás: Scientific objectives and payloads of Tianwen-1, China’s first Mars exploration mission
A leszállóegység az áramvonalas burkolatból, a hő pajzsból, a leszállófokozatból állt, a rover leszállófokozat tetején kapott helyet. A Tienven 1 roverének megtervezéséhez a Holdon már bizonyított Jütu roverek biztosították az alapokat. A rover felépítése hasonlít a kínai holdjárókéhoz, de méretét tekintve nagyobb azoknál. A 1230 mm hosszú, 830 mm széles, 540 mm magas és 240 kg tömegű rover testét egy téglalap alapú hasáb alkotja, amelyhez két oldalt csatlakozik a hat darab kereket tartalmazó rocker-bogie típusú felfüggesztés. A rover testében helyezték el az akkumulátorokat, a rover vezérlését és kommunikációs berendezéseit. A felfüggesztés egy kiegyenlítő műből, az ehhez kapcsolódó első kerékpárt magába foglaló jobb- és baloldali elülső felfüggesztő karokból és a középső-, valamint a hátsó kerékpárt tartalmazó jobb- és baloldali hátsó felfüggesztő karokból áll. A rocker-bogie típusú felfüggesztés azonos szinten tartja a kerekekre eső terhelés mértékét és minimalizálja a rover dőlését. Mindegyik kerék önálló meghajtással és független kormányzó mechanizmussal rendelkezik, így a rover mind a hat kerekét párhuzamosan kitérítve képes rák módjára oldalazó mozgást is végezni. Ha egy kerék elásná magát a laza talajban a beépített kerékemelő szerkezet segítségével ki lehet szabadítani. Ha az össze kerék érintett, akkor felfüggesztés összehúzásával lehet orvosolni a problémát. A felfüggesztés képes megemelni a jármű testét is, ha egy az akadálynak ütközne. A rover testének tetején van elhelyezve a négy darab kinyitható napelem, a kommunikáció antennái és egy kamera állvány. A Marson az átlagos Napból származó energia csak 43 % a földinek. Emellett a légkörben lévő portartalom tovább csökkenti az előállítható energia mennyiségét. Ezért a rover napelemeire különleges portaszító bevonatot vittek fel, ami javítja a poreltávolítás hatékonyságát. Továbbá a rover a megvilágítási viszonyokhoz igazodva használja az aktív és nyugalmi/alvó üzemmódokat. Egy porvihar esetén a rover alvó üzemmódba kapcsol, hogy ne merüljenek le az akkumulátorok és így várja ki a vihar elvonulását. A rover képes közvetlenül is kommunikálni a Földel, amikor a bolygó nincs takarásban, illetve a keringőegység, mint átjátszó állomás is képes továbbítani a rover jeleit. A roveren belüli megfelelő hőmérséklet fenntartásához többféle megoldást alkalmaztak a kínai mérnökök. A rovert felszerelték egy napkollektorral, ami napközben hőt gyűjt össze, amit aztán az éjszakai periódus alatt a belső rendszerek melegítésére használnak fel. Emellett éjszaka aktív hőmérsékletszabályozás működik a roveren belül, a passzív hőmérsékletszabályozásról pedig egy aerogél és szén-dioxid szigetelőréteg gondoskodik.
A rover mozgásakor két üzemmód közül választhat: autonóm veszélyelkerülő és vak mozgás üzemmód. Előbbi során a veszélyelkerülő szoftver azonosítja a felmerülő akadályokat és ezek alapján módosítja rover útvonalát A és B pont között. Utóbbi esetén előzetesen készült 3D térkép és vizuális pozícionálás alapján kerül meghatározásra az útvonal. A Csuzsung egyik kerekére egy kínai “中”szó jele került, amit a kerék a forgása közben belerajzol a talajba. A jeleket a keringőegység által lefotózva pontos kerékcsúszási adatokat kapnak. A rover műszereit szintén egy irányító egység vezérli, amelynek felépítése és működés azonos a keringőegységben lévő társáéval. A rovert hat darab tudományos műszerrel; egy navigációs- és domborzati kamerával, egy multi spektrális kamerával, egy talajradarral, egy felszín összetétel detektorral, egy magnetométerrel és egy időjárás vizsgáló állomással látták el. A navigációs- és domborzati kamera (Navigation and Terrain Camera, NaTeCam) feladata a felszíni topográfia és geológiai szerkezet tanulmányozása, illetve a rover mozgása során a navigálás. Látható fény tartományban 0,5 m és végtelen közötti fókusztávolságban dolgozik, felbontás 2048 x 2048 pixel. A kamera állvány tetejére szerelt két azonos kamera három dimenziós képek készítését teszi lehetővé. A multi spektrális kamera (Multispectral Camera, MSCam) szintén a kamera állványon van elhelyezve, a rover körüli környezetről készít multi spektrális képeket és az elemek eloszlását vizsgálja a felszínen. Cserélhető szűrőkkel rendelkezik, fókusztávolsága 1,5 m-től a végtelenig terjed, felbontása 2048 x 2048 pixel. A talajradar (Mars Rover Penetrating Radar, RoPeR) feladata a talaj összetételének meghatározása és a vízjég után kutatás. 55 MHz-es alacsonyabb frekvenciájú és 1300 MHz-es nagyfrekvenciájú rádiójeleket sugároz a talajba. Az alacsonyabb frekvenciájú hullámok mélyebbre hatolnak, mint a magasabb frekvenciájúak, így a műszer különböző mélységek vizsgálatára alkalmas. Az alacsony frekvenciás modulációval 100 méter mélységig képes vizsgálni a talajt, 1 méteres függőleges felbontással dolgozik, a visszaverődő jeleket pedig két monopólusú antennával érzékeli. A nagyfrekvenciás modulációval 10 méter mélységig képes feltárni talajt centiméteres felbontással, a visszaverődő jelek fogadása pedig Vivaldi antennákkal történik. A rover radarját a Csinghaj tartományban lévő Csajtam medence sivatagában tesztelték, ahol az sikeresen talált víz zárványokat. A felszín összetétel detektor (Mars Surface Composition Detector, MarSCoDe) a felszínen lévő kőzetek kémiai összetételét képes meghatározni. Aktív spektrális lézeres lebontó spektrográfja az ultraviola tartománytól közel infravörös tartományig képes színképelemezni a lézer által plazmává elgőzölögtetett mintát. A műszer passzív spektrofotométerre közel infravörös tartománytól rövid hullámhosszú infravörösig képes érzékelni a minta által kibocsátott fényt. A magnetométer (Mars Rover Magnetometer, RoMAG) a MOMAG műszerrel együtt a Mars mágneses mezejét és az ionoszférában létrejövő elektromágneses jelenségeket vizsgálja. Fluxgate típusú magnetométer, amely a kameraállványon van elhelyezve. Két szenzorral rendelkezik, méréshatára +-2000 nTesla, felbontás 0.01 nTesla. Az időjárás vizsgáló állomás (Mars Climate Station, MCS) a Mars felszíni időjárását vizsgáló mérőrendszer. A felszíni hőmérsékletet, nyomást, szélsebességet és irányt, valamint a felszínen érzékelhető hangokat méri. MEMS kapacitív nyomásmérőből, MEMS film alapú szélsebességmérőből, Fabry-Perot típusú interferométerből, akusztikus szenzorokból és termo metrikus szenzorokból áll. Méréshatárai; -130 +70 °C 0,1 °C-os felbontással, 1-2000 Pa 0,1 Pa felbontással, 0-70 m/s 0,2 -0,5 m/s-os felbontással, 0-360° 5°-os felbontással, 20 Hz-20 kHz. A rover tudományos műszerei közül NaTeCam, a MSCam és MarSCoDe akkor működik, amikor a rover áll, míg a RoPeR mozgás közben, a Romag és az MCS pedig mindkét üzemmódban használható.
A rover teszteléséhez a Kínai Űrtechnológia Akadémia pekingi központjában felépített tesztpályát alakították át homok és kövek segítségével a marsi környezethez hasonlóvá. A pályát eredetileg a Jütu holdjárók teszteléséhez építették korábban, most itt tesztelték a rover mozgását, különböző üzemmódjait és reagálását a veszélyes helyzetekre. 2018-ban felállították a repüléshez szükséges irányító csapatot a Pekingi Űrrepülés Irányító Központban. Szintén ezen év októberében megkezdték a GRAS-4 nevű mélyűri kommunikációs antenna építését az észak-kínai Tiencsin-ben. A 70 m átmérőjű antenna 1328 darab nagy pontossággal elkészített panelből áll, amelyeknek teljes felülete összesen 4560 m2. A teljes szerkezet 2700 tonna és 72 méter magas, üzemeltetését a Kínai Nemzeti Csillagászati Obszervatórium végzi. A tiencsin-i antenna mellett Hszincsiang-Ujgur Autonóm Területen lévő kashgar-i és Hejlungcsiang Provinciában található Csiamusze-ben lévő követőállomások vesznek részt a Tienven 1-gyel és a roverral történő kommunikációban. A Tienven 1 űrszonda főtervezője a Kínai Űrtechnológiai Akadémián Szun Cöcsou, helyettese pedig Zsao Vej volt. Az űrszondához köthető földi alkalmazások rendszerét Liu Csiencsün vezette csoport tervezte. A programhoz Kína külföldi partnereket is bevont: az űrszonda követéséhez igénybe vették az argentin CONAE Las Lajas követőállomást, amely a Csang’o 4 holdszonda küldetése során már részt vett hasonló feladatban. Az ESA Estrack követőhálózatának állomásai, a Francia Guyana-n lévő Kourou, az ausztráliai New Norcia és a spanyol Cebreros szintén segítettek a Tienven 1 helyzetének precíz meghatározásában. A Marsnál keringő Mars Express Orbiter tartalék átjátszó állomásként vesz részt a programban. A toulouse-i IRAP kutatóintézet a roveren elhelyezett lézer indukciós spektroszkóp (Laser Induced Breakdown Spectroscopy - LIBS), míg az osztrák Austrian Research Promotion Agency a magnetométer kalibrációját végezte el.
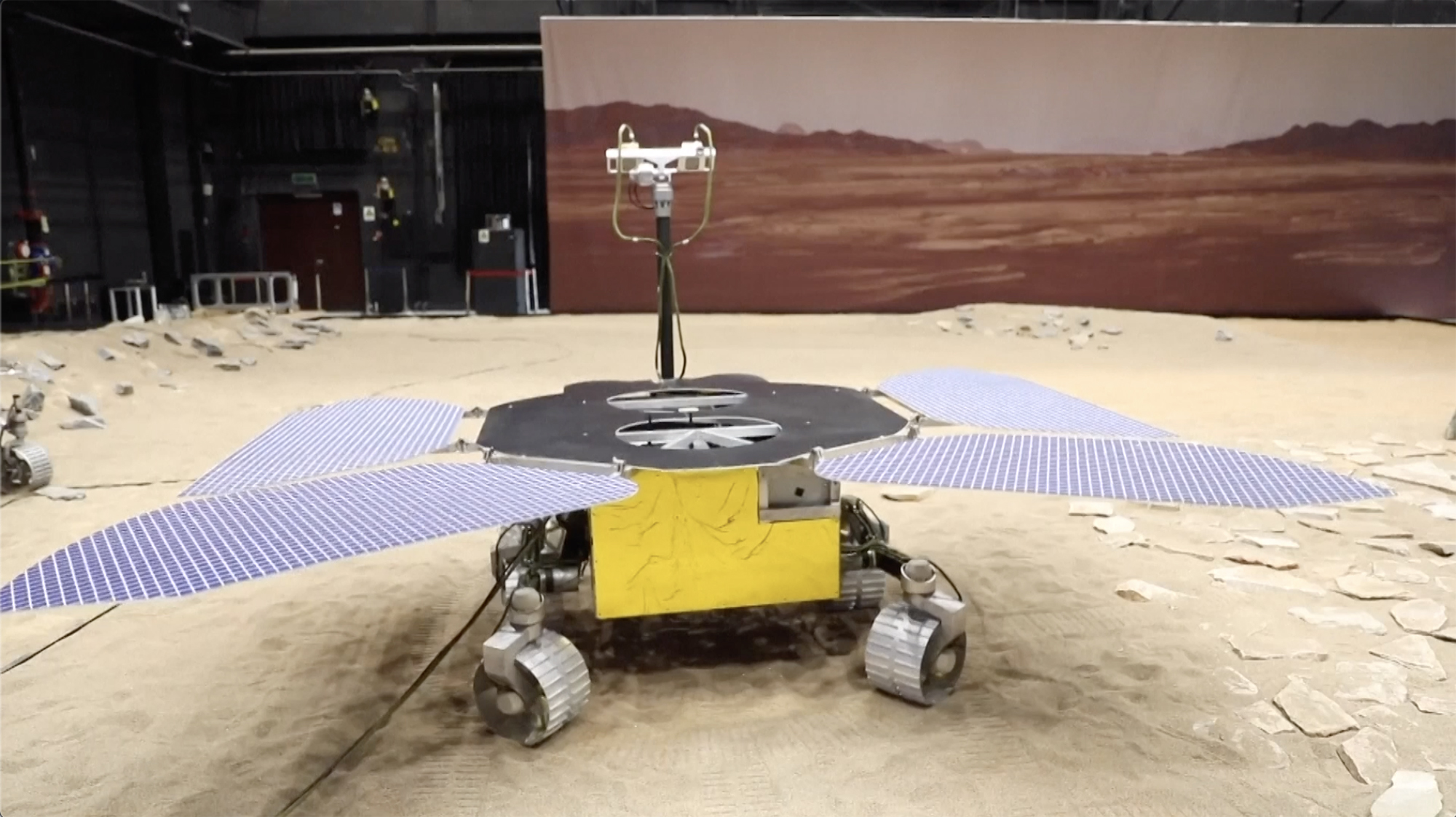
A Jütu holdjárók teszteléséhez felépült pályán vizsgálják a leendő marsjáró mozgását, különböző üzemmódjainak működését és reagálását a
veszélyes helyzetekre. A Kínai Űrtechnológia Akadémia pekingi központjában felépített tesztpályát homok és kövek
segítségével alakították át a marsi környezethez hasonlóvá.
Forrás: CNSA/CCTV

A CZ-5 hordozórakéta magasba emeli a Tienven 1-et 2020. július 23-án.
Forrás: BBC
Az egyelőre még névtelen rover elnevezéshez a Kínai Űrügynökség összeállított egy listát, amely tíz legendás kínai állat és mitológiai lény nevét tartalmazza: Hongyi, Csuzsung, Csilin, Csetu, Csiuszo, Csujmeng, Nöcsa, Fenghuolun és Hszinghuo. A neveket szavazásra bocsátották és az eredmény alapján fogják majd a rovert elnevezni, mikor az már a Marshoz ért. A Tienven 1 programja szerint az űrszonda 2020 nyarán indul és hét hónapos utazás után 2021 februárjában éri el a Marsot, ahol ellipszis alakú pályára áll a bolygó körül. Erről a pályáról több hónapig tanulmányozzák majd a rover leszállóhelyéül kiválasztott térséget, ezután a rover 2021 nyarának elején landol a bolygó felszínén. Amikor eljön a leszállás ideje az leszállóegység körülbelül 20 000 km/h sebességgel lép be a légkörbe. A hő pajzs megóvja az egységet a ritkás marsi légkörön való áthaladás során, majd leválik. Az áramvonalas burkolat tetején lévő szuperszonikus ejtőernyők lelassítják a zuhanást, majd a burkolat is leválik és a leszállóegység hajtóműve veszi át a fékezés szerepét. A hajtómű egészen a felszínig működik folyamatosan, ahol a leszállóegység a négy kinyitható lökéscsillapító lábával finoman landol. A rover a leszállást követően egy rámpapár segítségével gördül majd le a leszállóegység tetejéről. A teljes leszállás a tervek szerint körülbelül 7 percig tart majd. A leszállóegység és a rover számára két olyan területet választottak ki elsődleges- és tartalék leszállóhelynek, ahol a lejtők szöge, a sziklák sűrűsége és a hőmérsékleti viszonyok megfelelnek a biztonságos landolás és a Földdel való kommunikáció követelményeinek. A két 150 x 60 km-es terület közül az elsődleges leszállóhely az Utopia Planitia déli, a tartalék az Elysium Mons nyugati részén helyezkedett el. Az Utopia Planitia a Mars északi féltekéjén elterülő hatalmas területű becsapódási kráter, amelynek átmérője nagyjából 3300 km, ezzel ez a terülte a Mars és egyben a Naprendszer legnagyobb ilyen képződménye. Korábban itt landolt a Viking-2 űrszonda leszálló egysége. A terület elég sima, nincsenek meredek lejtői, lapos homokból álló dombok alkotják a felszínt. Feltételezések szerint az Utopia Planitia lankás felszínét valaha egy óceán borította, így előfordulhatnak üledékes kőzetek a felszínén. Illetve a Mars Reconnaissance Orbiter űrszonda mérései alapján az Utopia Planitia-n a felszín alatt találhatók vizet tartalmazó rejtett zárványok. A Marsot elérve a Tienven 1 keringőegysége egy 265 x 12 000 km magasságú ellipszis alakú pályára áll és megvizsgálja a bolygó elektromágneses és gravitációs mezőit, valamint a felszín ásványi- és kémiai összetételét, a kamerái által elkészített felvételekből pedig összeállítja a Mars geológiai és morfológiai térképét. A rover eközben meghatározza a felszín anyagösszetételét és víz-jég tartalmát, valamint megvizsgálja a talajszinti légkört és időjárást. A keringőegység élettartamát egy marsi évre, azaz nagyjából két földi esztendőre, a roverét pedig 90 solra tervezték.
A Tienven 1 hordozórakétájául a Hosszú Menetelés (Csang Cseng) rakétacsalád jelenleg legerősebb tagját a CZ-5-öt választották ki. A kétfokozatú, négy oldalsó gyorsító rakétával rendelkező hordozó 2016. november 3-án repült először, 25 000 kg-ot képes alacsony magasságú Föld körüli és 14 000 kg-ot geostacionárius transzfer pályára állítani. A Tienven 1 felbocsátása a legújabb CZ-5B változat szűzfelszállása is volt egyben. Az összeszerelt hordozórakéta-űrszonda párost 2020. július 17-én gördítették ki az indítóálláshoz. Két órába telt, amíg függőleges állapotban lévő rakéta eljutott az indítópadig. A CZ-5 Y4 volt az első kínai hordozórakéta, amivel a Mars felé indított űreszközt a távol-keleti ország. A Tienven 1 2020. július 23-án pekingi idő szerint 12:41-kor indult a Hajnan szigetén található Vencsang Űrközpontból. 36 perccel a felbocsátást követően az utolsó fokozat begyújtásával sikeresen Mars irányú pályára állították az űrszondát. A Tienven 1-nek hét hónapra volt szüksége ahhoz, hogy átszelje a Föld és a Mars közötti űrt. Július 27-én, amikor a távolodó szonda mintegy 120 000 kilométerre járt a bolygónktól, lefotózta a Földet és a Holdat. Augusztus 19-én már 8,23 millió kilométere volt a Földtől, ekkor elkezdték tesztelni a fedélzeti műszereket, a magnetométert, az ásványtani spektrométert, a közepes- és nagyfelbontású kamerákat. A tesztek során a műszerek tökéletesen működtek. A repülés során négy alkalommal korrigálták a szonda pályáját. Először augusztus elsején 23 órakor gyújtották be a hajtóművet 20 másodpercig, ekkor az űrszonda 3 millió km-re volt a Földtől. Szeptember 20-án hajtották végre a második pályakorrekciót, valamint ellenőrizték az űrszonda berendezéseit, amelyek közül mindegyik egészségesnek bizonyult. 24 millió kilométerre a Földtől az űrszondáról levált egy széles látószögű kamera, amely távolodása közben másodpercenként egy-egy képet készített magáról az űrszondáról illetve az űrről, majd továbbított azokat a Tienven 1-nek. Október 9-én újabb sikeres pályamódosítási manővert hajtott végre az űrszonda, amikor világidő szerint 15:00-kor a hajtómű 480 másodpercig tartó begyújtásával a pályájának inklinációját 1 °-ról 1,8 °-re növelték. Február 5-én került sor a negyedik pályakorrekcióra, ekkor a Tienven 1 mindössze 2,2 millió km-re volt a Marstól. Ezen a napon tesztelték a nagyfelbontású kamerát és felvételeket készítettek a Marsról, amelyeken a Schiaparelli-kráter és a Valles Marineris kanyon-rendszer jól megfigyelhető. Végül az űrszonda 470 millió km megtétele után egy 14 percig tartó fékezéssel 2021. február 10-én pekingi idő szerint este nyolc óra körül sikeresen Mars körüli pályára állt. A kínai űrkutatást jellemző zártság miatt a Tienven 1 megérkezése a Marshoz élő adásban nem lett közvetítve, csak a sikeres érkezés után jelentették azt be. Ennek ellenére lelkes és tehetséges rádióamatőrök belehallgattak az űrszonda és az irányító központ kommunikációjába és előbb tudtak a sikeres fékezésről, mint azt a kínai hatóságok a világ tudtára adták. Az űrszonda erősen elnyújtott 400 x 180 000 km magasságú ellipszis pályáját február 23-án pekingi idő szerint 6:29-kor megváltoztatták egy alacsonyabb 280 x 59 000 km magasságú pályára, amelyről az Utopia Planitia jobban megfigyelhető. A Tienven 1 Mars körüli pályára állásával Kína a hatodik nemzet lett a Szovjetunió, az Egyesült Államok, az Európai Űrügynökség, India és az Egyesült Arab Emirátusok után, amely képes volt önerőből az általa alkotott űreszközzel elérni a vörös bolygót.

A Tienven 1 2021. július 27-én készítette ezt a képet a Föld - Hold párosról, ekkor már mintegy 120 000 kilométerre távolodott el a bolygónktól.
Forrás: CNSA
A távolodó kamera által készített fényképek egyike a Mars felé tartó Tienven 1-ről.
Forrás: CNSA
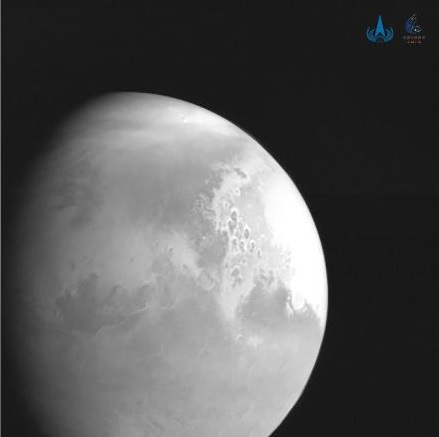
Az első szürkeárnyalatos fotó a Marsról, amelyet a közeledő Tienven 1 nagyjából 2,2 millió km távolságból készített.
Forrás: CNSA
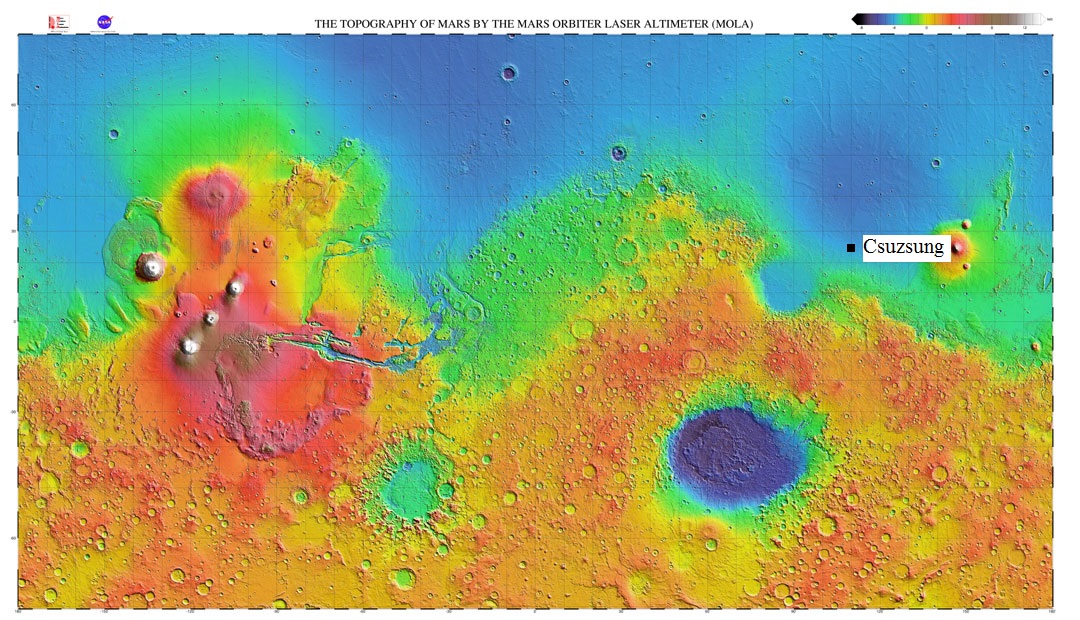
A leszállóegység és a rover leszállási helye a Mars magasság szerint szinezett térképén.
Forrás: NASA
A Kínai Űrügynökség 2021. április 24-én megrendezett hatodik kínai űrnapon jelentette be a marsrover hivatalos nevét. A Tienven 1 roverjének egy ősi kínai tűzisten után a Csuzsung nevet adták. Ez a név kapta a tíz jelölt közül a legtöbb szavazatot és a kínai űrhivatal is rábólintott a döntésre. Ezt követően a következő nagy lépésre május közepéig kellett várni. Az elsődleges leszállási zóna közel van egy hegyvidék-alföld határterülethez, amelyről a szakemberek azt feltételezik, hogy egy ősi óceán partvonala. A Csuzsung landolása előtt a Tienven 1 keringőegysége három hónapig vizsgálta a területet a HiRIC kamerával 350 km magasságból. A felvételekből összeállított térképek alapján a leszállási zónát egy 58 x 22 km nagyságú ellipszis alakú területre redukálták. Május 14-én a Tienven 1-től elválva a leszállóegység és a Csuzsung rover nagyjából 4 km/s-mal belépett a Mars légkörébe. A légkör sűrűbbé válása miatt a hő pajzzsal előrefelé száguldó leszállóegység körül egy felforrósodott plazmaburok alakult ki, majd a súrlódási szakaszt elhagyva kinyílt az ejtőernyő. Az ejtőernyős fékezés során lézeres távmérőt használtak a magasság és mikrohullámú szenzorokat a sebesség pontos megállapításához, a minél pontosabb leszállás elősegítése érdekében. Végül a leszállás utolsó szakaszában fékezőhajtóművek lassították le az űreszközöket. A fékezőrakétás szakaszban beindul a veszélyelkerülő rendszer programja, amely optikai eszközökkel és lidar rendszerrel pásztázta végig a leszállóegység alatti területet, akadályokat és elkerülendő területeket keresve. Május 14-én 23:11-kor (világidő) a leszállóegység a Csuzsung roverrel sima leszállást hajtott végre a Mars Utopia Planitia nevű területének déli részén, az északi szélesség 25,06 °, keleti hosszúság 109,9 ° koordinátájú pontban. Kína ezzel a harmadik olyan nemzetté vált a Szovjetunió és az Egyesült Államok után, amely sikeres sima leszállást hajtott végre a vörös bolygón. 17 percbe telt, amíg a sikeres leszállás igazolása megérkezett a pekingi irányító központba. A feltérképezés alapján a kínai szakemberek öt geomorfológiai képződmény fajtát azonosítottak a leszállóhely környezetében; földsánccal körülvett kráterek, földkúpok, gerincek, teknők és rézsútos fodrozódások. Két különböző földsánccal körülvett kráter található a leszállóhely északi és déli szélén. Az északi kb. 9 km átmérőjű becsapódási kráter mélysége nagyjából 1,2 km. A földkúpok az Utopia Planitia legjellemzőbb és legellentmondásosabb képződményei. Léteznek különálló földkúpok és csoportosak is. Legvalószínűbb magyarázat az, hogy ezek a képződmények salak kúpok, vagy pingók, azaz föld takarta jégből álló halmok, egyenlőre azonban nem tudni pontosan, hogy miből állnak. A gerincek hosszúsága, amiket valószínűleg vulkanizmus vagy tektonikusmozgás hozott létre, 0,59 és 12,6 km között változik. A teknők hossza 1,2 és 10 km, mélységűk pedig 1 és 20 m közé esik. A rézsútos fodrozódások jellemzőek a területre, legtöbbjük kelet-nyugati irányú, ami azt feltételezi, hogy korábban észak-déli volt az uralkodó szélirány.
Leszállás után a Csuzsung néhány solon keresztül még a leszállóegység tetején maradt, a saját rendszereit ellenőrizte és a leszállóhely környezetét tanulmányozta, valamint sor került a hat fedélzeti műszer bekapcsolására és tesztelésre is. Eközben a Tienven 1 pályáját 48 órás keringési periódusú, nagyobb magasságú pályáról 8,2 órás periódus, alacsonyabbra csökkentették az adatkapcsolat javítása érdekében. Május 19-én a Kínai Űrügynökség megjelentette az első fotókat, amiket a rover készített. A Csuzsung pekingi idő szerint május 22-én délelőtt 10:40-kor gördült le először a leszállóegység platformjáról és megkezdte 90 solig tartó fő kutatási programját. Az energiahatékonyság érdekében a rover általában stand-by üzemmódban van, ami a vezérlő számítógépet folyamatosan, a műszereket pedig csak időszakosan tartja bekapcsolva. Egy sol alatt a fő munkaperiódus helyi idő szerint 11 és 15 óra között van, amikor a külső hőmérséklet a legmagasabb és nincs szükség belső fűtésre. A Tienven 1 keringőegysége naponta egyszer halad el a Csuzsung pozíciója fölött, ekkor kerülnek továbbításra az adatok. Minden sol reggelén a keringőegység megkapja a rover feladatainak listáját, amelyet délben továbbít a rovernek végrehajtásra. A nap végén a Csuzsung telemetriai adatcsomagot állít össze az irányító központ számára. Naponta marsi idő szerinti 4:30-tól 16:00-ig látható a Föld a marsi horizonton, a rover az X-sávú omnidirekcionális antennája segítségével 7,8 bit/s sebességgel tudja venni a földi jeleket. Június 11-én a rover 10 méterre távolodott a leszállás helyétől, kioldott egy hasán lévő kamerát, majd a leszállóegység mellé hajtott a kamera pedig fényképeket készített a két űreszközről. A vezeték nélküli kamera ezután elküldte a fényképeket a rovernek, amely a Tienven 1-en keresztül továbbította azokat a Földre. A Tienven 1 szintén lefotózta űreszköz társait a Mars felszínén. Felvételein láthatóak a hő pajzs és az ejtőernyők maradványai is. Korábban már a NASA MRO űrszondájának HiRISE kamerája szintén lefotózta a bolygó felszínén tevékenykedő kínai rovert. Június közepén a Csuzsung elindult dél felé a hegyvidék-alföld határterülethez, hogy az egykori esetleges óceán nyomai után kutasson. Ezek lehetnek az alacsony permittivitás, amely alacsony sűrűségű üledékes kőzeteket, vagy nagytömegű földalatti jeget jelezhet, nagy kén és klór tartalom, ami pedig sók és szulfátok jelenlétét jelezheti.
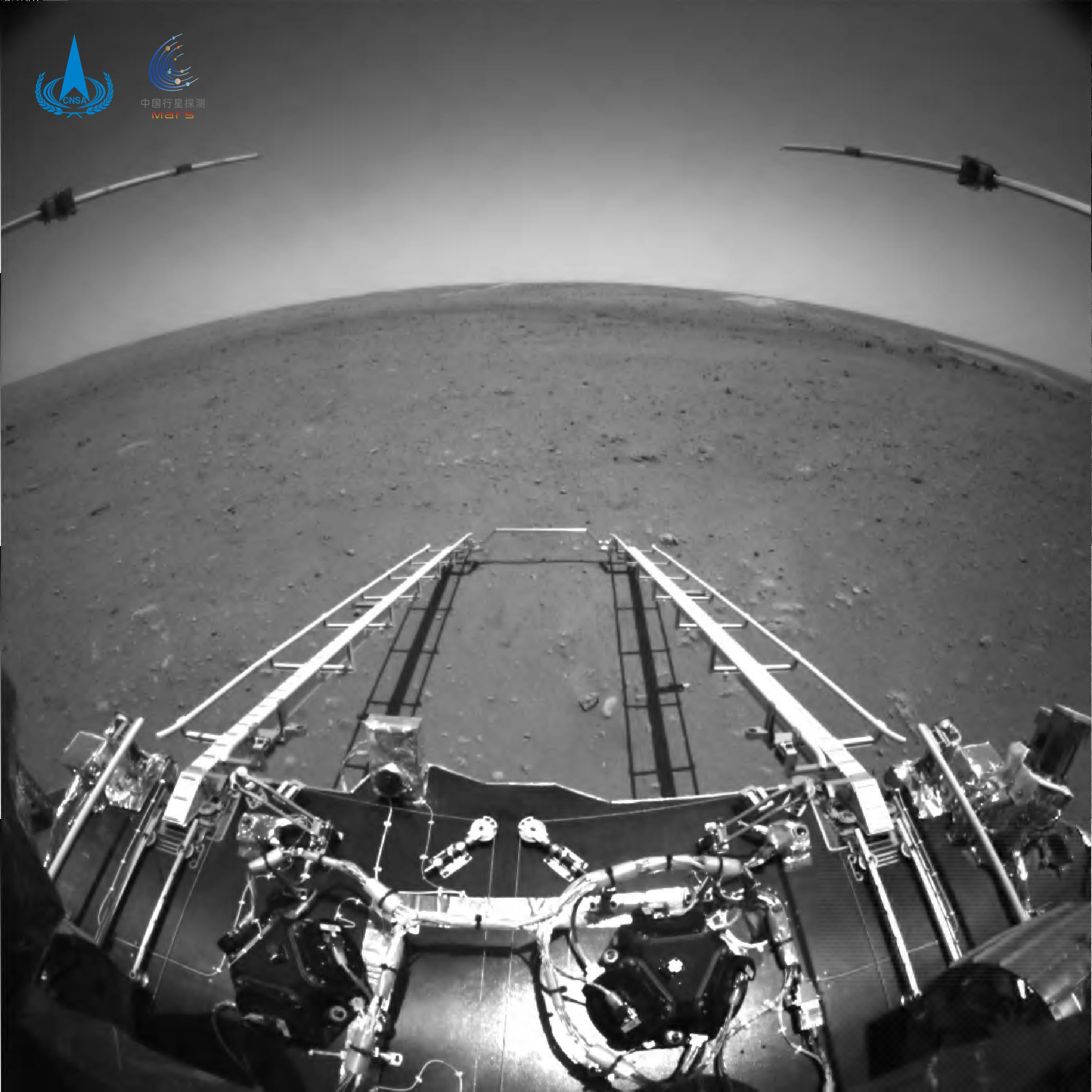
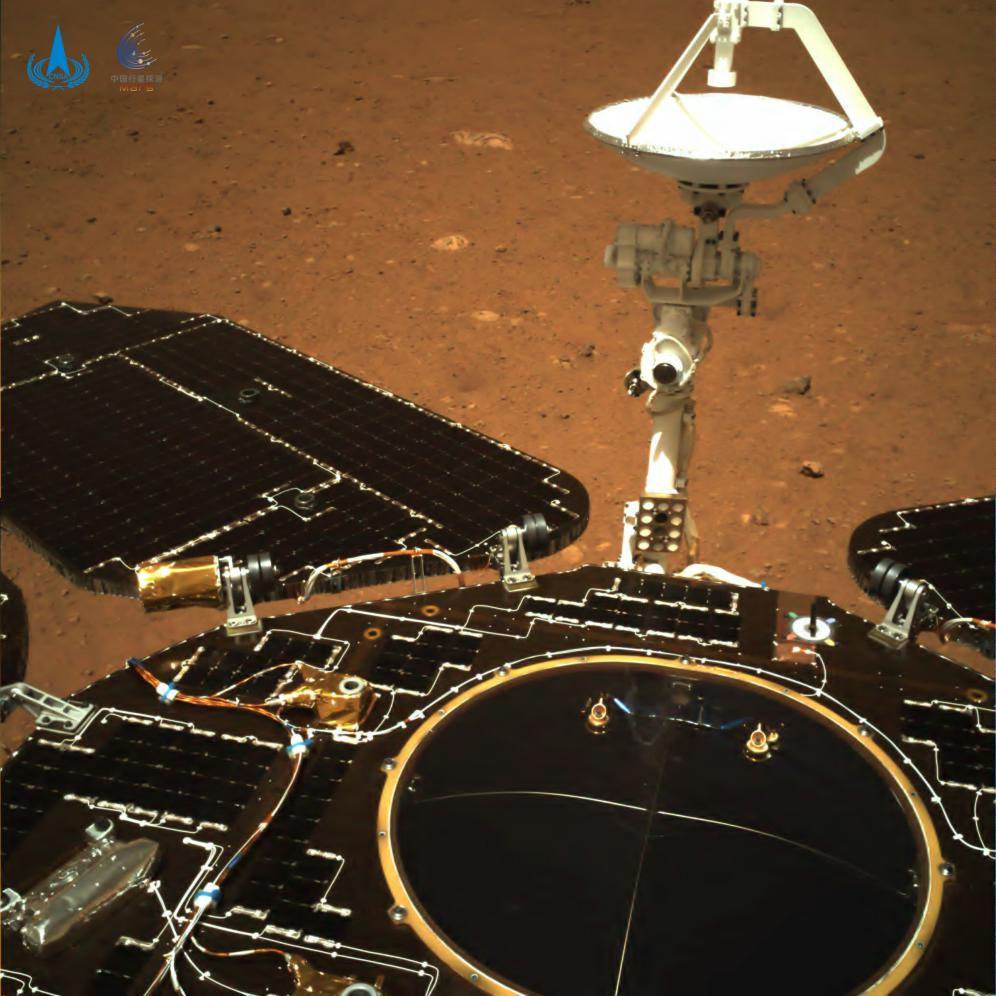
A Csuzsung navigációs kamerája 2021. május 19-én rögzítette ezt a felvételt, amelyen a rover még a leszállóegység tetején látható.
A jármű elött a rámpa helyezkedik el, két oldalt pedig a talajradar antennái lógnak bele a képbe.
Forrás: CNSA
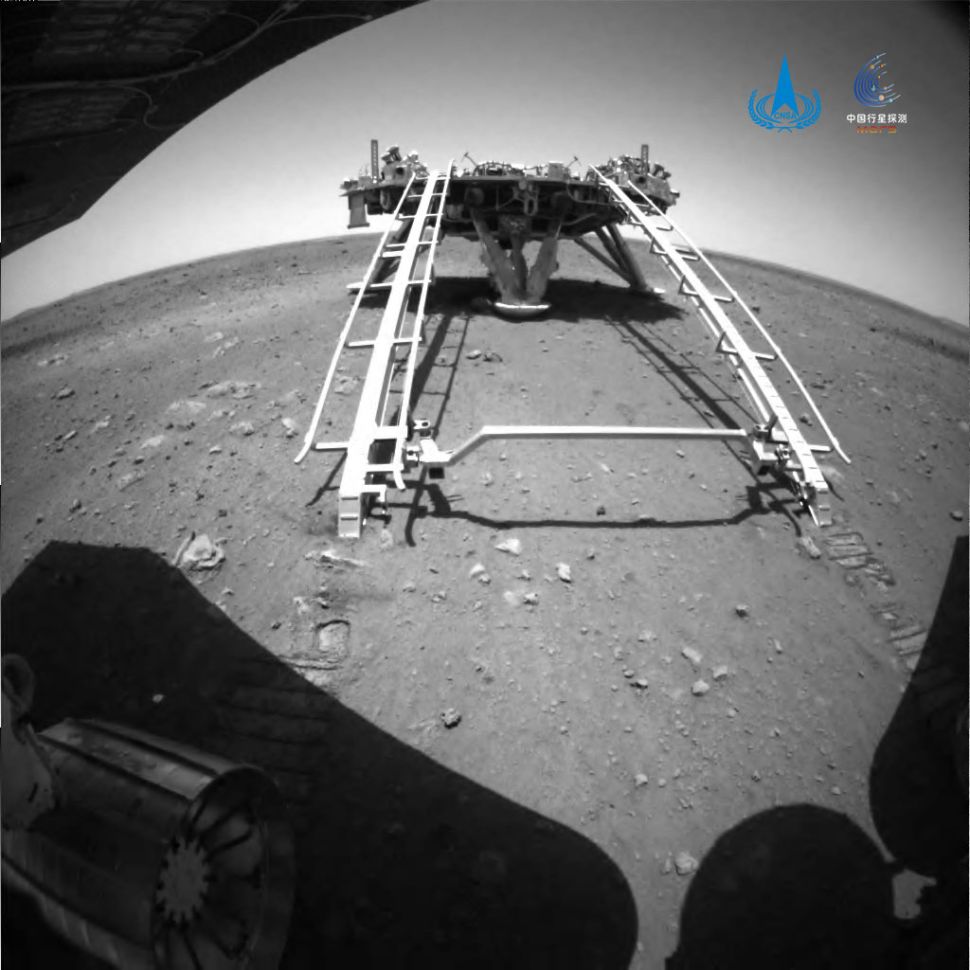
A Csuzsung már a Mars felszínén állva a veszélyelkerülő kamerája segítségével visszanéz a leszállóegységre 2021. május 21-én.
Forrás: CNSA
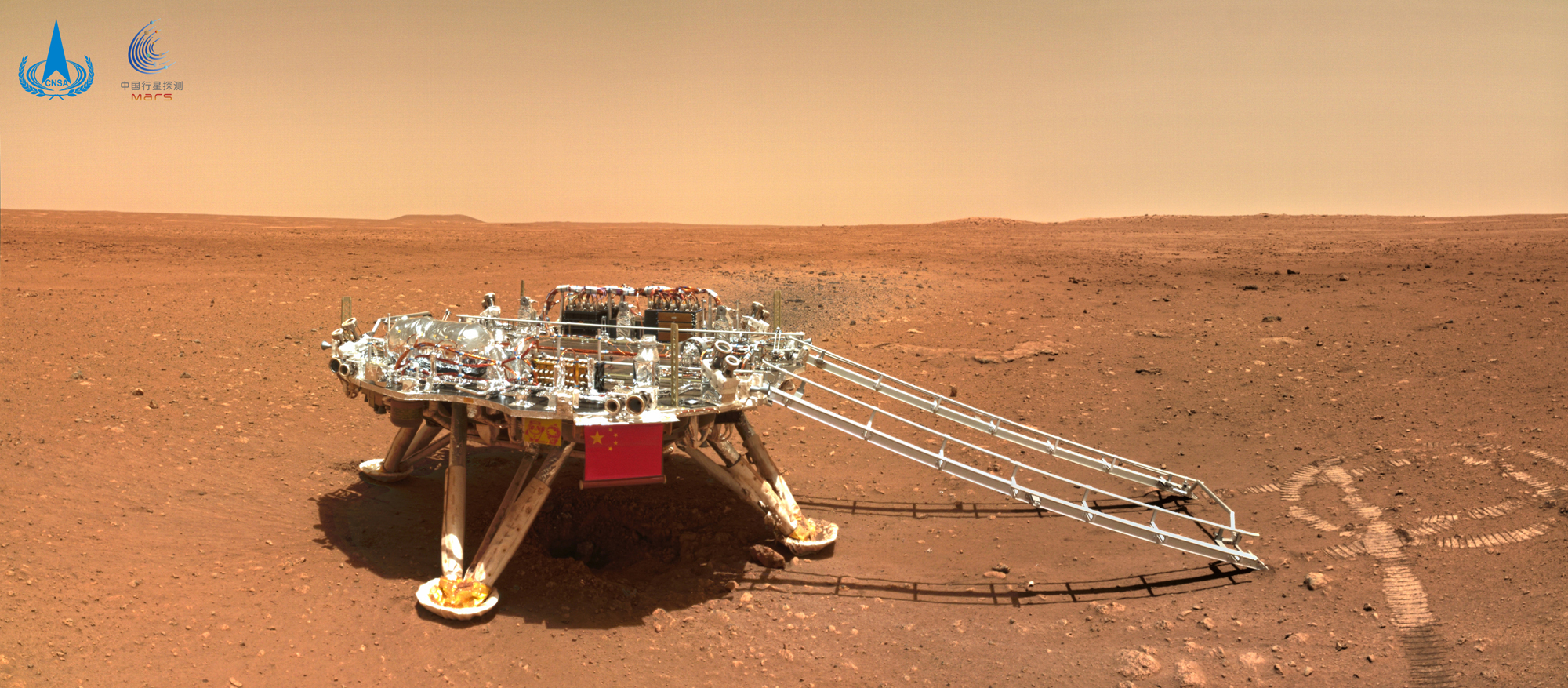
A Csuzsung fotója a leszállóegységről.
Forrás: CNSA
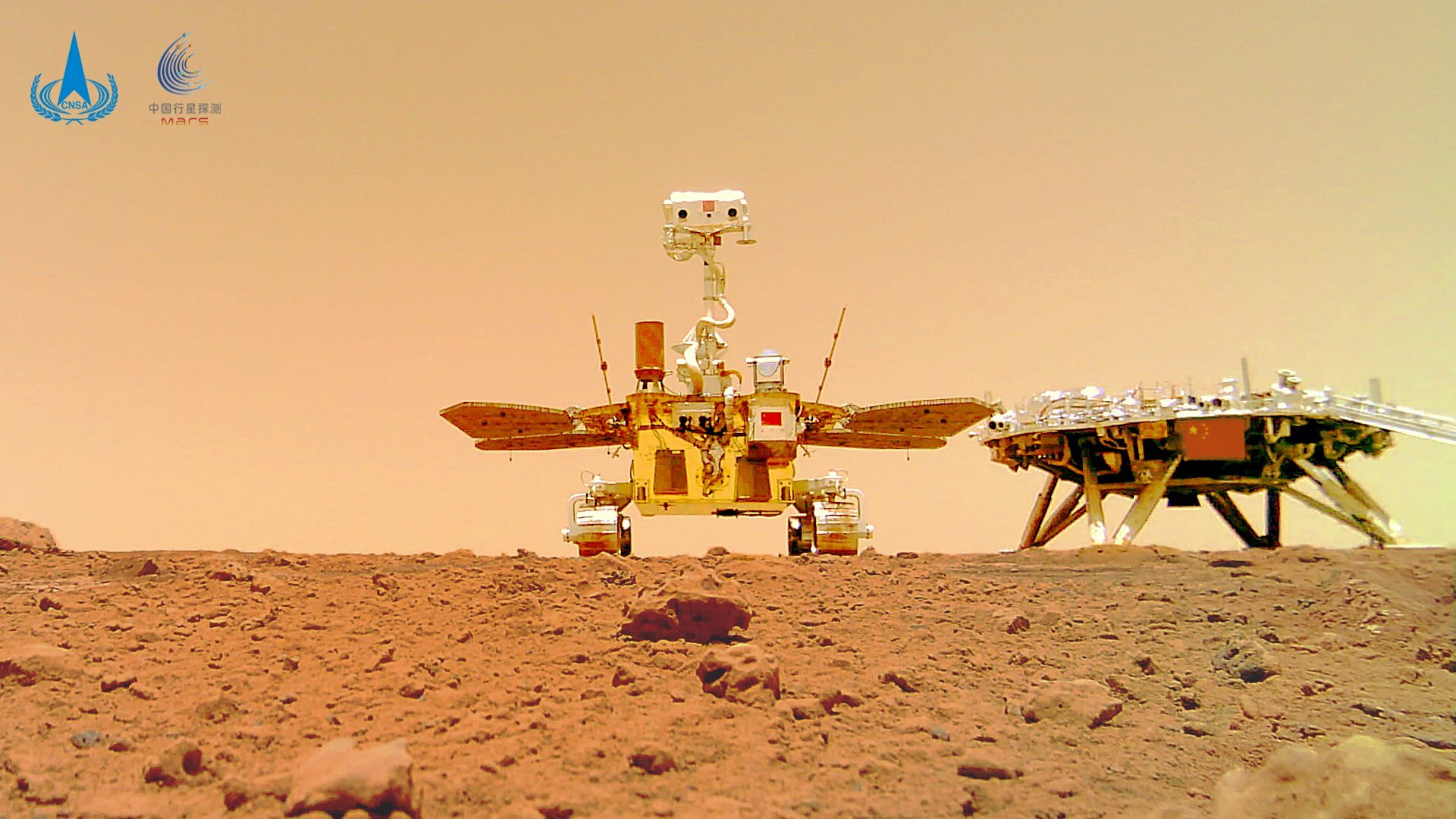
A kihelyezett vezeték nélküli kamera fényképe a Csuzsung-ról és a leszállóegységről.
Forrás: CNSA
Részlet a Csuzsung napelemekkel borított tetejéről. A hatékonyság növelése érdekében a napelemek különleges portaszító bevonatot kaptak.
Forrás: CNSA
Június 27-én a kínai űrhivatal kiadott két videót, egyik a Csuzsung leszállóégségről való legördülését, a másik pedig a Mars felszínén való haladását örökítette meg. A videókon a jármű hangja és a környezet hangjait is rögzítették. Az 50. solon a leszállóhelytől nagyjából 200 méterre a rover elérte az első homokdűnét, egy kb. 50 m hosszú, 8 m széles és 0,6 m magas rézsútos fodrozódást. A fodrozódás felszínét két fajta eltérő színű homok borította. Ahogy a Csuzsung tovább haladt dél felé a talaj folyamatosan emelkedett. Július 12-én a jármű elérte a leszállóegység ejtőernyőjét és hő pajzsát, amelyek nem messze a leszállóegységtől csapódtak a Mars felszínébe. A Csuzsung a veszélyelkerülő kameráival lefotózta a saját nyomait és színes fényképeket készített az ejtőernyőről és a hő pajzsról. Ekkor a rover nagyjából 350 méterre volt a leszállóhelytől és 30 méterre a hő pajzstól. A Csuzsung a 60. soljáig körülbelül 450 méternyi távolságot tett meg a vörös bolygó felszínén és 7 Gbit adatot továbbított a Tienven 1 felé. Július végén a rover már 585 méternél járt és szél által képzett homokdűnéket tanulmányozott. Augusztus 5-én a Csuzsung teljesítette a 90 solig szóló elsődleges tudományos programját, ezalatt 889 métert tett meg. Ekkor egy olyan területet vizsgált, ami leginkább egy ősi tengerpart alatti területnek tűnt az Utopia Planitia déli régiójában. Eddig a Csuzsung tökéletesen működött és nagyjából 10 gigabyte tudományos anyagot továbbított a Földre. Augusztus 30-án a Kínai Népi Bank limitált darabszámban arany és ezüst emlékérméket helyezett forgalomba a Csuzsung elsődleges missziójának sikeres befejezését megünnepelendő. Szeptember 5-ig a rover 1064 métert tett meg, miközben folyamatosan dél felé haladt. Szeptember közepétől október végéig a Csuzsung és a Tienven 1 is védett módba töltötte azt az időszakot, amíg a Föld és a Mars a Napnak pontosan átellenes oldalán tartózkodott. A Nap zavaró hatása miatt ezen időszak alatt a kommunikáció nem volt biztonságos az űreszközökkel. Közvetlenül a Föld - Nap - Mars együttállás miatti szünet előtt a rover számos panorámaképet készített a környezetéről. A szünet alatt mindkét űreszköz folyamatosan figyelte a belső állapotát, öndiagnosztikát futattak, ha pedig szükséges volt hibaelhárítást végzett. A szünetig a Csuzsung összesen 1182 métert tett meg. Október 21-én sikerült újra felvenni a kapcsolatot a két űreszközzel.
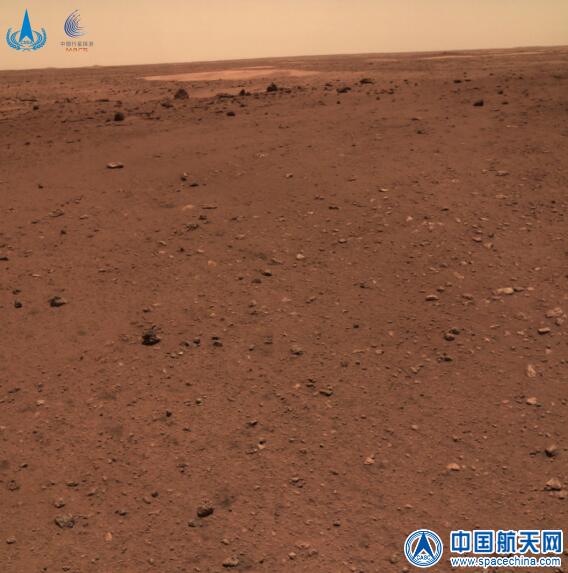
Látkép az Utopia Planitia síkságáról 2021 júniusából.
Forrás: CNSA
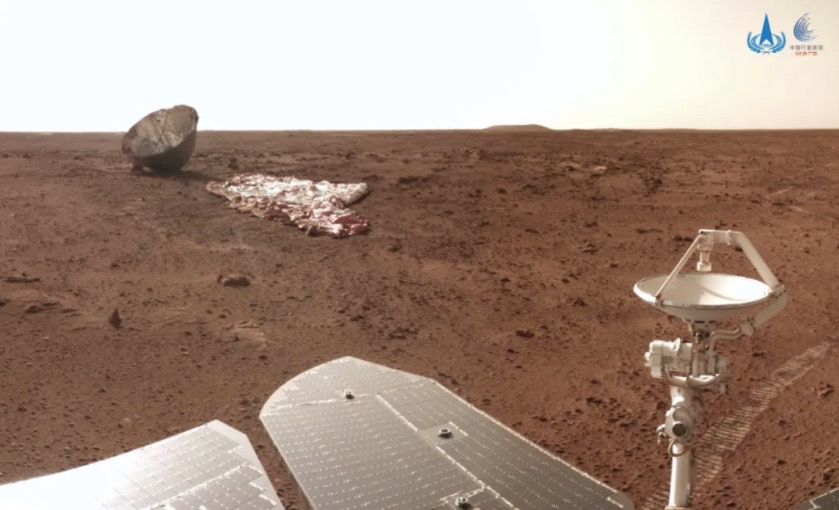
A Csuzsung 2021. július 12-én megtalálta a saját ejtőernyőinek és az áramvonalas burkolatnak a maradványait a Mars felszínén.
Forrás: CNSA

Panoráma az Utopia Planitia-ról 2021 augusztus végéről. (Külön lapon megnyitva a kép tovább nagyítható.)
Forrás: CNSA
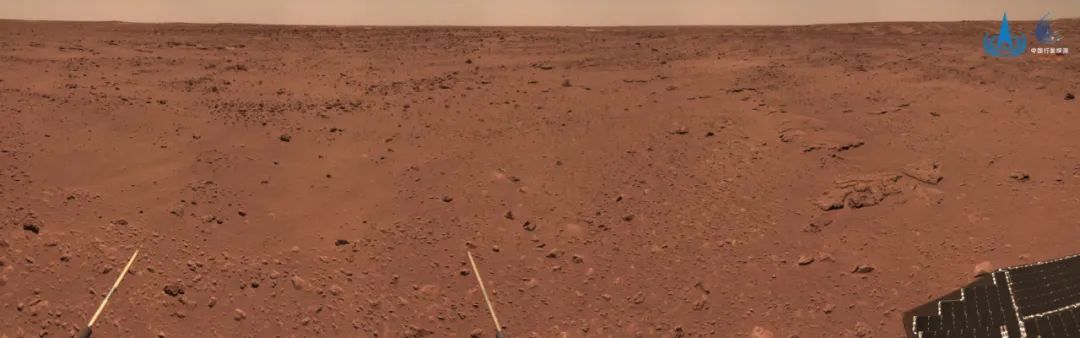
A Föld - Nap - Mars együttállási szünet után készült egyik panorámafotó az Utopia Planitia-ról.
Forrás: CNSA
November elején a Csuzsung már 1253 méternél járt. Ettől a hónaptól kezdve változás állt be a Tienven 1 programjában. Mivel a Csuzsung teljesítette az elsődleges tudományos küldetését, ezért a keringő űrszondát 265 x 12 000 km magas pályára helyezték át annak érdekében, hogy végrehajthassa a saját megfigyelési programját. A Csuzsung adatátvitelét Tienven 1 mellett a 2003 óta mars körül keringő ESA Mars Express űrszonda is segíti . A kapcsolat azonban ez esetben egyirányú, ugyanis a Mars Express csak fogadni tud adatokat a kínai rovertől, parancsokat nem képes továbbítani neki. A Mars Express-szel való kommunikációt egy öt tesztből álló tesztsorozattal vizsgálták, amelyből egyedül a negyedik teszt járt sikerrel. November 20-án egy kísérleti adatküldés során a Csuzsung felett 4000 km magasan elrepülő Mars Express sikeresen vette a rover 233 kilobyte-os adatcsomagját és továbbította azt az ESA fogadóállomásain keresztül a Kínai Űrügynökségnek. Az ESA és a CNSA közösen további vizsgálatokat és teszteket végeztek, amelyek során vizsgálták, hogy mennyire látható a keringő űrszonda a Csuzsung számára és hogy mekkora a legideálisabb bit arány és küldési idő. A Csuzsung a 2021-es év végéig 196. sol alatt 1297 méter tett meg.
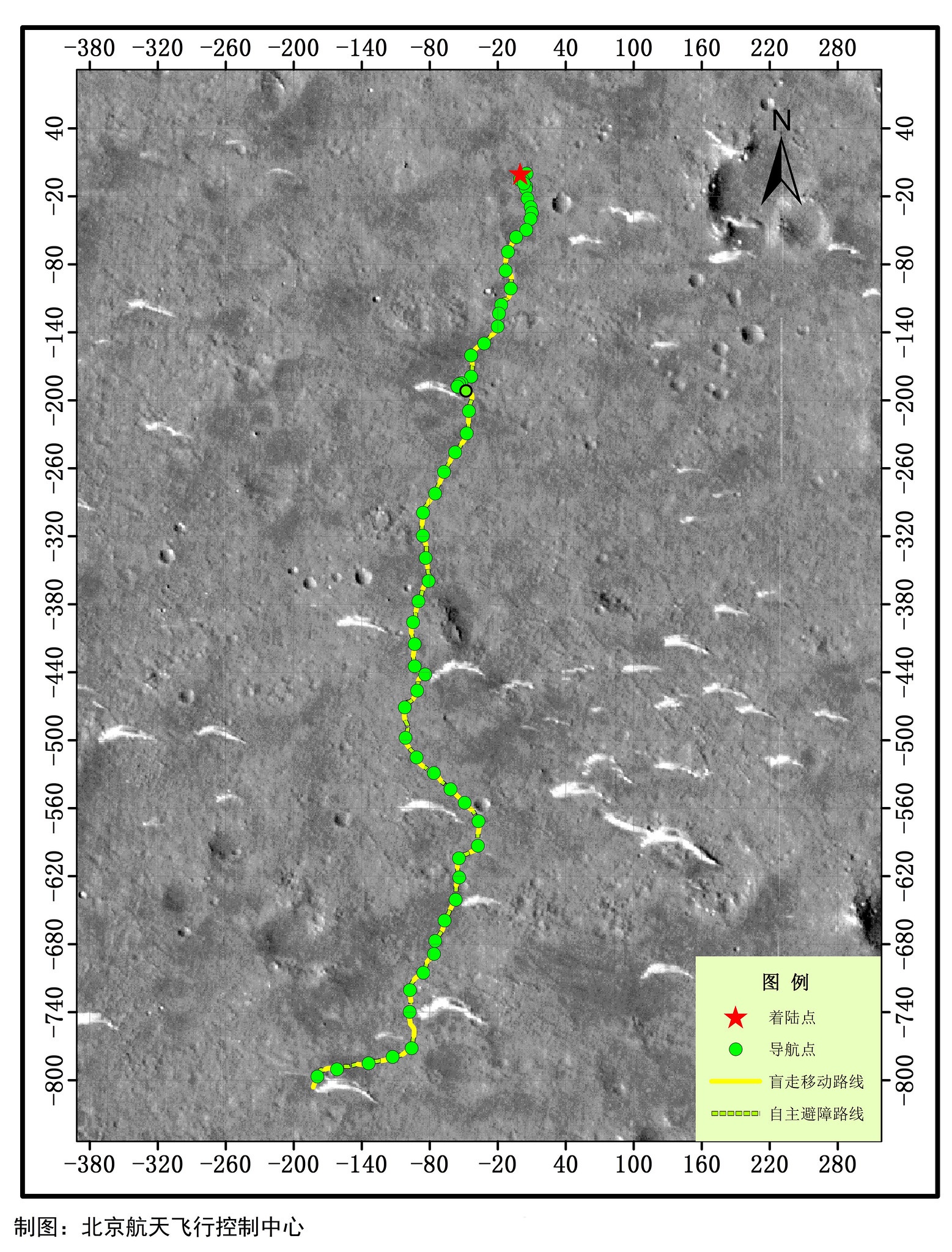
A Csuzsung útvonala az Utopia Planitia-n 2021 augusztusáig. Az oldalsó skálák méterben vannak megadva.
Forrás: CNSA
A Csuzsung és a Tienven 1 eddig eredményei alapján a sikerült jobban megismerni az Utopia Planitia jellemzőit. A leszállási zóna egy mélyföldön fekszik, aminek kora nagyjából 3,32 - 3,36 milliárd év. Dél felé az átlagos emelkedés 2,3 °. A talaj kohéziója magas, a por hozzátapad a kerekek felületéhez. A lapos leszállóhelyet kisméretű kráterek szakítják meg, amelyek átmérője 1,1 és 287,6 m között változik, de 79 %-uk átmérője 10 m alatt van. A krátereket sötét sziklák veszik körül, amik valószínűleg kidobott anyag lehet. A 200 méternél nagyobb kráterek mállott törött peremmel rendelkeznek. A legtöbb szikla finomtextúrájú szerkezettel és kis legömbölyítettséggel rendelkezik. Számos szikla lepattogzott felülettel rendelkezik, amik valószínűleg hideg környezetben sóoldat hatására meginduló oldódási folyamat során keletkeztek. A fodrozódások világos tónusúak, félhold alakúak, alakjuk alapján északnyugati-délkeleti helyi szélirányt mutatnak. A Csuzsung 2022-ben is folytatja munkáját a Marson. További eredményeiről a sorozat egy későbbi részében lesz majd szó.
- China Mars mission: Tianwen-1 spacecraft enters into orbit
- Tianwen-1 and Zhurong, China's Mars orbiter and rover
- Tianwen-1: China's first Mars mission
- The facts on Tianwen-1: Mars orbiter and rover
- China’s Tianwen-1 mission is now orbiting Mars ahead of landing
- Tianwen-1, China's mission to Mars, has entered orbit
- NASA's Perseverance, China's Tianwen-1 and UAE's Hope arrive at Mars this month
- We Just Got The First Photo of Mars From China's Tianwen 1 Probe, And It's Breathtaking
- China launches ambitious Tianwen-1 Mars rover mission
- 3 rovers will head to Mars in 2020. Here’s what you need to know about their chemical missions
- Scientific objectives and payloads of Tianwen-1, China’s first Mars exploration mission
- GROUND PENETRATING RADAR DE TECTION ON POLYGONAL TERRAINS IN THE QAIDAM BASIN: POSSIBLE IMPLICATION FOR LIFE SEARCH ON MARS.
- China launches next-generation space capsule on Long March 5B rocket test flight
- China's Tianwen-1 Mars probe snaps epic deep-space selfie (photos)
- China chooses landing site for its Tianwen-1 Mars rover
- China's Tianwen-1 Mars probe captures epic video of Red Planet during orbital arrival
- China's Tianwen-1 spacecraft will reach Mars orbit on February 10
- Mars ahead! China's Tianwen-1 mission snaps 1st photo of Red Planet.
- Huge antenna ready to support China's Tianwen-1 Mars mission
- Tour China's 'Mars yard' for its Tianwen-1 rover mission (video)
- China's Tianwen-1 Mars rover mission gets a boost from international partners
- China's Tianwen-1 Mars mission rolls out to launch pad (photos, video)
- China's 1st Mars rover will get one of these 10 names, and you can vote to select the winner
- China's Mars mission tests instruments on its way to the Red Planet
- On its way to Mars, Chinese spacecraft spots Earth and moon, aces steering maneuver
- China's Tianwen-1 lowers its orbit around Mars to prepare for rover landing
- Here's what we know about planetary protection on China's Tianwen-1 Mars mission
- China's first Mars mission, Tianwen-1, successfully enters orbit around Red Planet
- Meet 'Zhurong': China names Tianwen-1 Mars rover ahead of mid-May landing attempt
- China to attempt its first Mars rover landing today
- China's Mars rover landing: How Zhurong will attempt to touch down on the Red Planet
- China's 1st Mars rover 'Zhurong' lands on the Red Planet
- China's newly landed Mars rover Zhurong likely to roll into action this weekend
- Behold! China unveils 1st Mars photos from Zhurong rover
- China's Zhurong Mars rover rolls onto the Martian surface (photos)
- China's Mars rover Zhurong spotted from space by NASA orbiter (photos)
- China's Mars rover Zhurong just snapped an epic self-portrait on the Red Planet (photos)
- NASA spacecraft spots China's Mars rover Zhurong heading south on Red Planet (photo)
- Hear the 1st sounds from China's Mars rover Zhurong and watch it drive in new video
- On its first try, China's Zhurong rover hit a Mars milestone that took NASA decades
- China's Mars rover Zhurong just found its parachute and backshell (video)
- China's Zhurong Mars rover scopes out dunes on journey south
- China's Mars rover Zhurong completes primary mission, gets life extension
- China celebrates its first Mars mission on new gold and silver coins
- China's Zhurong Mars rover returns panorama ahead of planetary blackout
- China's Tianwen-1 Mars mission is going offline for a while
- At Mars, China's Tianwen 1 orbiter and Zhurong rover are back in action after a radio blackout
- Europe's Mars orbiter relays data from Chinese rover back to Earth
- China's Tianwen-1 sends back its first picture of Mars
- Localization and Surface Characterization by Zhurong Mars Rover at Utopia Planitia
- Slip Estimation for Mars Rover Zhurong Based on Data Drive
- Geomorphic contexts and science focus of the Zhurong landing site on Mars
- Zhurong: Features and mission of China’s first Mars rover
Kapcsolódó írások
Kerekeken a Naprendszerben 1.
A Lunohod holdjárók