Kerekeken a Naprendszerben 2. rész
A Lunar Roving Vehicle
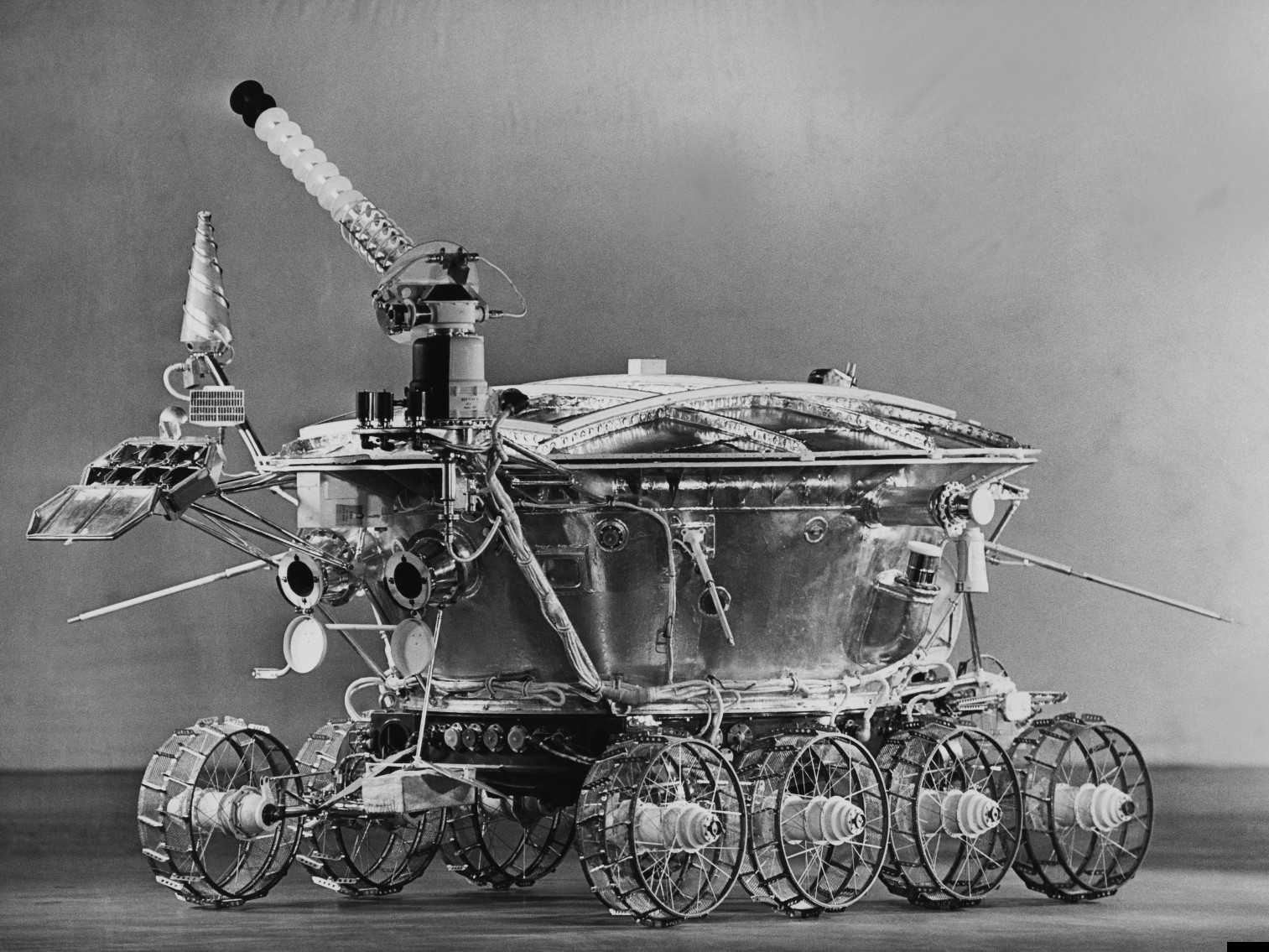
A Lunohod 1 után majdnem egy évvel megérkezett a Holdra az LRV, azaz a Lunar Roving Vehicle első példánya. A rover különbözött a szovjet társától, nem a Földről kiadott parancsok alapján irányították, hanem az Apollo program űrhajósai vezették és funkcióját tekintve közvetlen célja nem a tudományos kutatás volt, hanem hogy biztonságosan eljuttassa az űrhajósokat az egyik pontból a másikba. Ennek ellenére az LRV rendkívüli mértékben tágította ki az űrhajósok mozgásterét és a tudományos kutatást a Holdon. Kifejlesztésének története és rendkívüli műszaki megoldásai miatt megérdemli, hogy részletesebben bemutatásra kerüljön a sorozatban.
Az ötvenes évek végén Szergej Koroljov a szovjet, és Wernher von Braun az amerikai űrkutatás motorjai mindketten úgy gondolták, hogy egy leendő Hold-expedíció során az űrhajósok és a felszerelésük felszínen való mozgatását leghatékonyabban lánctalpakon gördülő, vagy kerekeken guruló, túlnyomásos kabinnal rendelkező járművekkel oldhatnák majd meg. Ekkor a Föld körüli randevú koncepciója volt a legelfogadottabb terv a Hold eléréséhez. A terv arról szólt, hogy több közepes teherbírású hordozórakéta segítségével Föld körüli pályára juttatnak űrhajórészeket, amelyből egy űrhajószerelvényt szerelnek össze. Ez fog majd elrepülni a Holdig és landolni a felszínén. A Holdhoz induló űrhajószerelvény elég nagy lenne ahhoz, hogy több tonnás, zárt, túlnyomásos fülkével rendelkező holdi járműveket is magával vigyen. Ezekre szükség is lenne, ugyanis az egyenetlen terep miatt egy nagyméretű leszálló űrhajóval nem biztos, hogy pontosan a kijelölt célpont közelében tudnának leszállni. A felszíni járművek azonban megfelelő mozgásszabadságot adnának az expedíciónak. Később 1962-ben, az Apollo-program beindulásakor a Föld körüli űrrandevú ötlete átadta a helyét a Hold körüli űrrandevúnak. Ahelyett hogy több hordozórakétával indítanák egy nagyobb űrjármű elemeit és a Föld körül szerelnék össze őket, a holdűrhajót és a holdkompot egyetlen hatalmas hordozórakéta jutatja majd el a Holdig. A legfontosabb problémává a súlytakarékosság vált, mert bármennyire is erős volt a tervekben szereplő Saturn V, mindössze 48,6 tonnát tudott a Hold felé indítani. Ebbe a tömegbe pedig bele kellett férnie a parancsnoki űrhajónak, a holdkompnak, a felszerelésnek és az űrhajósoknak is. Mindezek mellett szinte alig maradt hely egy felszíni jármű számra.
Az űrhajósokat és felszerelést szállító járművek ötlete mellett párhuzamosan megjelent a felderítő automata járművek ötlete is. A JPL, azaz a pasadena-i Sugárhajtás Kutatóintézet 1961-ben kezdett foglalkozni egy olyan űrszonda ötletével, amely pontos leszállást tudna végrehajtani a Holdon. A Prospector nevű űrszonda a tervek szerint a Hold látható oldalának bármely kijelölt pontjához viszonyított 1 km-es sugarú körön belül tudott volna landolni. A leszálló egységre terveztek egy 680 kg-os rovert is, amely távvezérelve tudná felfedezni a Hold felszínt. A program ötlete egybeesett az Apollo program bejelentésével, a NASA vezetése ezért találkozott a JPL képviselőivel, hogy megállapítsák a Prospector program előnyeit és lehetséges felhasználását az Apollo támogatójaként. A NASA vezetését a tervből egyedül a pontos leszállás kivitelezése érdekelte, a rovert túl bonyolultnak és nehéznek találtak. 1961-ben minden erőforrást az holdra szállás emberekkel történő megvalósításához irányítottak át és a NASA számára egyáltalán nem hiányzott egy házon belüli konkurencia az Apollo-programnak, ezért a Prospector-t és roverjét hamarosan törölték. A holdfelszíni járművek fejlesztését azonban továbbra is fontosnak tartották, így számos terv született velük kapcsolatban.
Az egyik legelső próbálkozásként a Bendix Corporation 1961-es tanulmányaiban három-, illetve négykerekű konstrukciókat vizsgált. A háromkerekű jármű távvezérlésű automata lett volna 800 km-es hatótávolsággal, a négykerekű változat pedig 3 személyt szállíthatott volna 14 napig és 400 km hatótávolságig. 1963-ban már hivatalos pályázatot írt ki a NASA Lunar Logistic System néven holdfelszíni járművek tervezésére. Az űrügynökség szponzorálta a tervek létrehozását. A pályázatra a Northrop, a Grumman és a Boeing repülőgépgyárak jelentkeztek. A Northrop számos tervet megvizsgált automata és kézi irányítású roverekkel kapcsolatosan, amelyek tudományos kutatást tudtak volna végezni, illetve felszereléseket és az űrhajósokat tudták volna szállítani. A Northrop rovere zárt kabinú négytengelyű jármű volt. Több kabin kialakítást is vizsgáltak, mindegyik nagyjából 3 tonnás járművet eredményezett volna, ami 14 napig tud tevékenykedni a felszínen, 400 km hatótávval. A Grumman Project 344 néven különböző rover konstrukciókat vizsgált automata illetve kézi vezérléssel, 1, 2 és 3 személyes kivitelben. A Boeing LES Lunar Exploration Systems nevű zárt kabinú roverje két személyt tudott volna szállítani nyolc napig 480 km hatótávval. A kabin 5 köbméter térfogatú, a jármű pedig nagyjából három tonna tömegű lett volna. A Marshall Űrközpont 1964-es kiírása egy olyan Hold felszínén mozogni képes jármű kifejlesztésére vonatkozott, amelynek zárt túlnyomásos fülkéjében az űrhajósok szkafander nélkül tudják felfedezni az égitestet. A MOLAB (Moving Laboratory) kiírásra a Boeing Company, a Bendix Corporation, a Brown Engineering Company, a Grumman Corporation és a General Motors Company jelentkezett. A Boeing 1965-ös terve, az LSSM, egy négykerekű, 200 km hatótávú, kétszemélyes konstrukciót tartalmazott, ami 14 napig tudott volna a felszínen közlekedni. Első és hátsókerék kormányzással rendelkezett, energiáját radioizotópos termoelemek biztosították, tömege pedig nagyjából 2 tonna lett volna. A Grumman egy egytengelyű túlnyomásos vontatóból és a hozzá kapcsolt egytengelyű utánfutóból álló járművet tervezett.
A General Motors-on belül már az ötvenes évek óta működött egy Defense Research Laboratories nevű kísérleti részleg, amely a hadsereg különleges járműprojektjeiben vett részt. A részleg vezetője a lengyel származású Miecyslaw Bekker volt, aki több műszaki tanulmányt is írt a szárazföldi kerekes járművek mozgási tulajdonságairól. Bekker csapatában több magyar mérnök, köztük Pavlics Ferenc is dolgozott. Pavlics 1928-ban Balozsameggyesen született és 1950-ben diplomázott a BME-n, mint gépészmérnök. 1956-ban a forradalmat követő zűrzavarban feleségével együtt elhagyta az országot és előbb Ausztriába, majd onnan pedig az Egyesült Államokba emigrált. Bekker egy New Jersey melletti menekül táborban találkozott Pavliccsal, ahová pont tehetséges kelet-európai mérnökök interjúztatása miatt utazott. A hatvanas évek közepén a MOLAB kiírás miatt a GM DRL részlege már 1200 fősre duzzadt és 1966-ban létrehozták a saját prototípusukat, egy kéttengelyű, négykerekű lapos járművet, amely zárt túlnyomásos fülkével és légzsilippel rendelkezett. 33,6 km/h maximális sebességre volt képes és a meredek lejtőkön is fel tudott mászni. Az elkészült járművet az Egyesült Államok Geológiai szervezete élesben is tesztelhette az arizonai Flagstaff-ban és felhasználták az űrhajósok geológiai kiképzése során is. A Bendix hatalmas majdnem két méter átmérőjű kerekekkel tervezett egy négykerekű konstrukciót, a Mobility Test Article-t, ami alvázként funkcionált volna egy leendő holdjárműben. Kerekei két koncentrikus fém hengerpalástból álltak, amelyet henger alakú rugalmas tagok kapcsoltak össze. A rugalmas hengerek belapultak a talaj felöli oldalon így gumiabroncshoz hasonló rugalmasságot és tapadási felületet biztosítottak a járműnek.

A Bendix Mobility Test Article nevű prototípusát tesztelik a próbaterepen. Jól látszanak a különleges kialakítású kerekek.
Forrás: Lunar Driving Simulator History
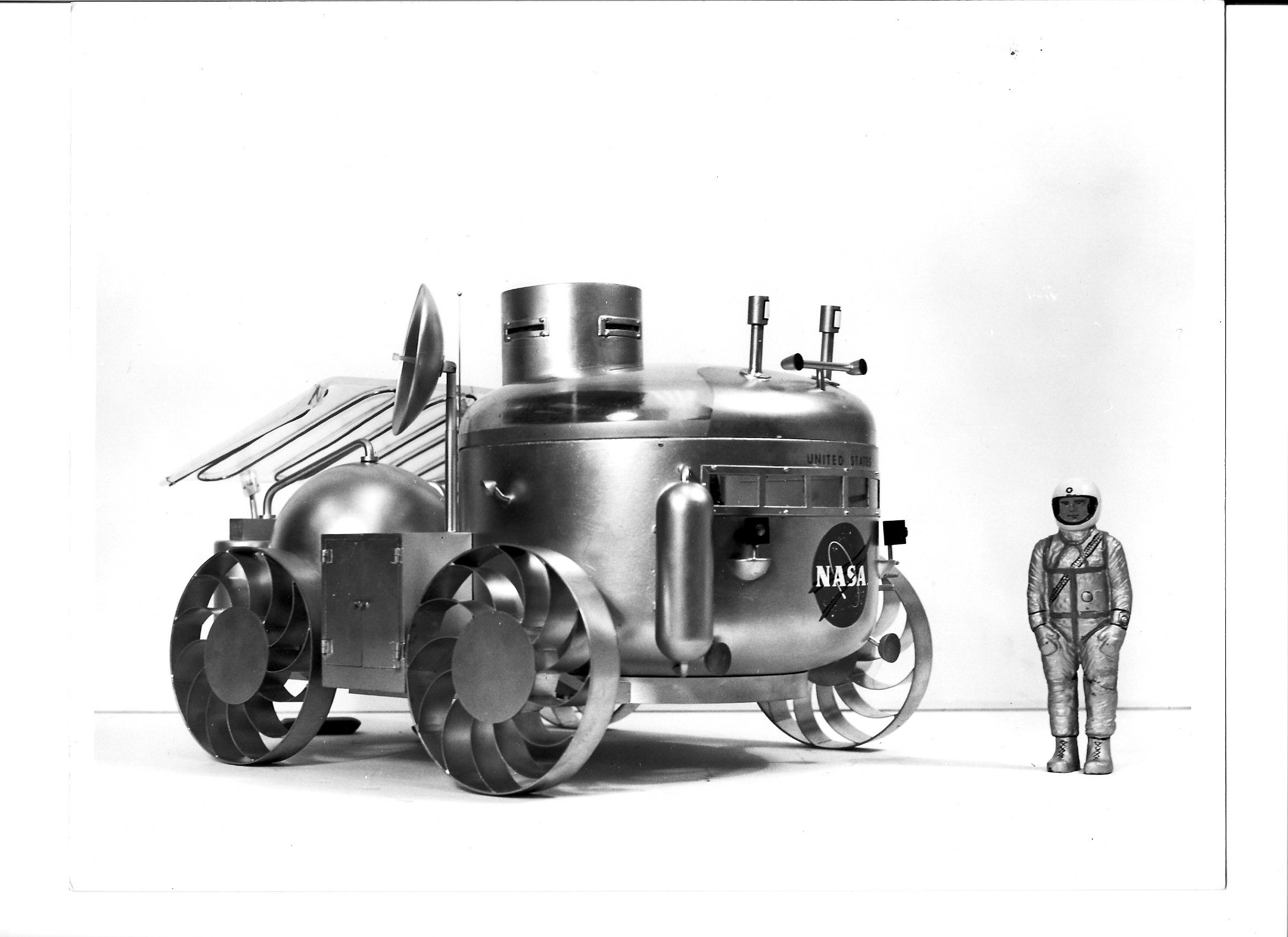
A Marshall Űrközpont prototípusa 1963-64 környékéről. A jármű egy Saturn V hordozórakétával jutott volna el a Holdra.
Forrás: Lunar Driving Simulator History
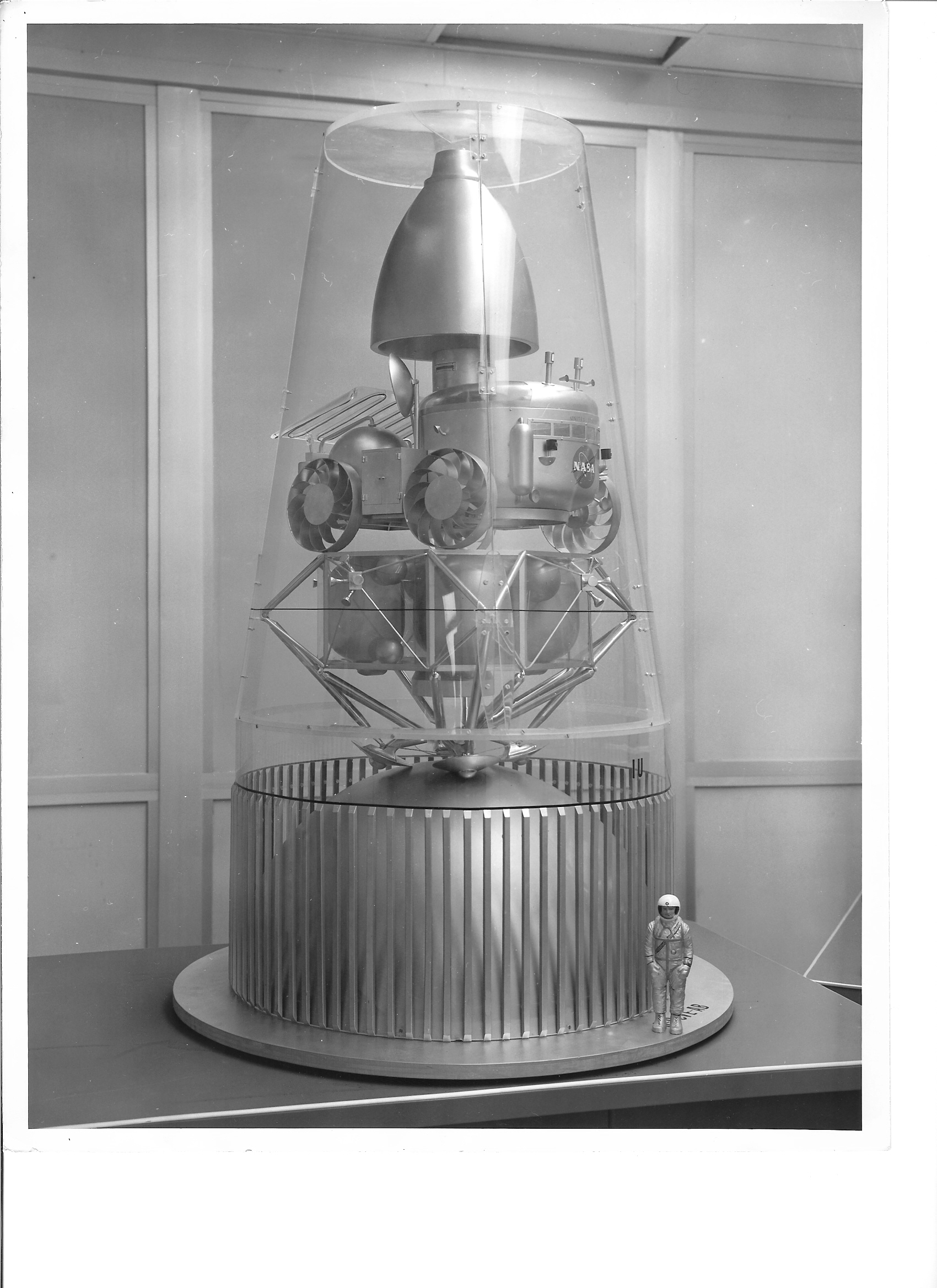
A Marshall Űrközpont prototípusának elhelyezkedése az Saturn V hordozórakéta S-IVB fokozatában. A jármű a
holdkomp alsó fokozatátból kialakított egység segítségével landolt volna a felszínen. A jármű feletti harang az Apollo
űrhajó hajtóművéhez tartozik.
Forrás: Lunar Driving Simulator History
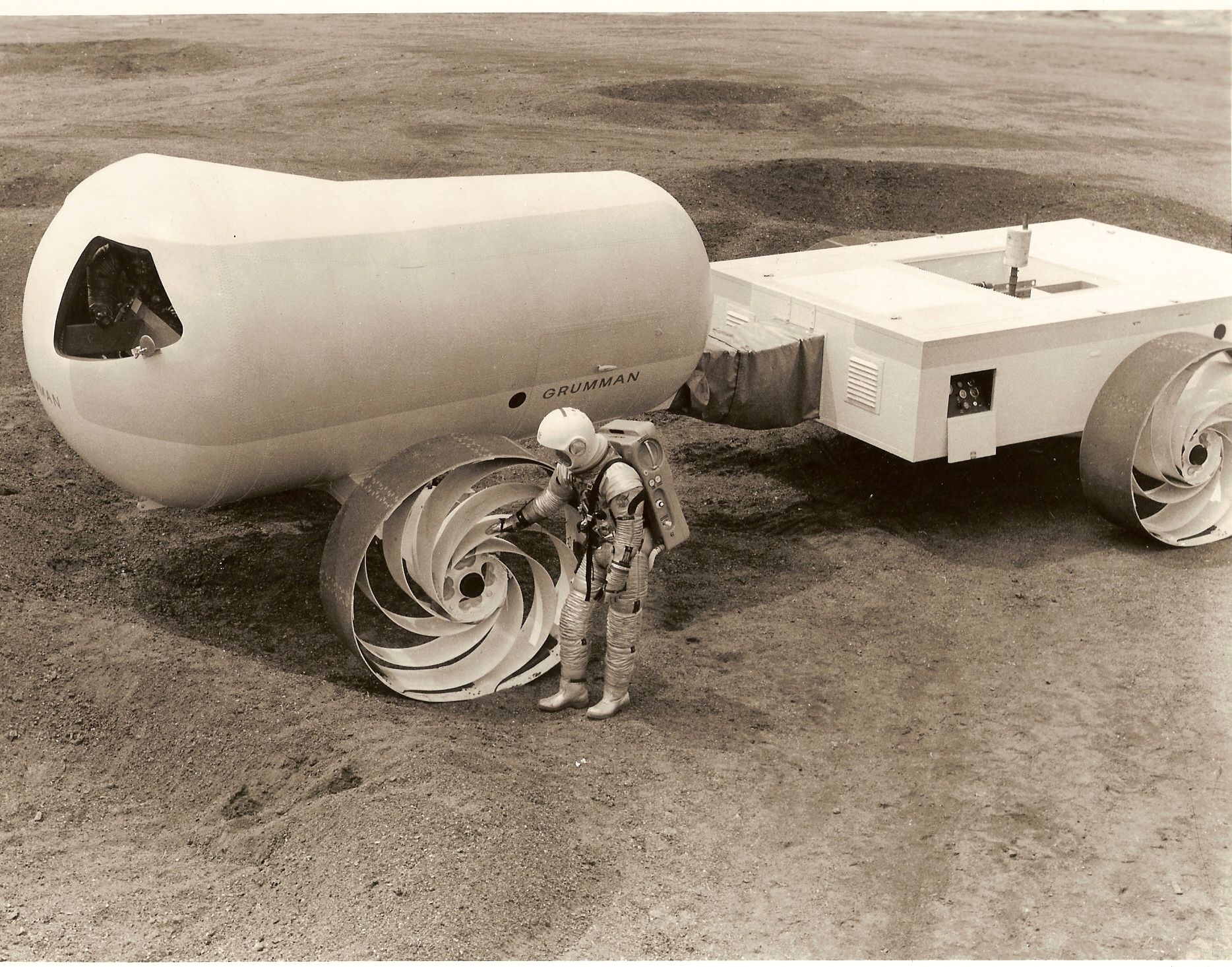
A Grumman csuklós koncepciója.
Forrás: Lunar Driving Simulator History
A Bendix később több változatát is vizsgálta egy Apollo program keretében felépítendő holdbázishoz szükséges rovernek. A nagyjából három tonnás, négykerekű jármű 14 napig tudott volna működni 400 km hatótávolsággal. A jármű kabinja túlnyomásos volt légzsilippel ellátva. A Marshall Űrközpont is létrehozott egy saját járművet, amely a Grumman terveihez hasonlóan kis kétszemélyes fülkével ellátott egytengelyű vontatóból és egytengelyű utánfutóból állt. A jármű elfért a Saturn V utolsó fokozatának, az S-IVB-nek a tetején, abban a tárolótérben, ahol eredetileg a holdkomp kapott helyet. Automatikusan tudott volna landolni a Holdon a holdkomp leszállófokozatának tetején. A Brown Engineering egy könnyű járművet alkotott két tengellyel, négy kerékkel és könnyűszerkezetes csövekből álló alvázzal. 1965-re készült el és a Marshall Űrközpont mozgási kísérleteiben használták fel. 1967-ben a Légierő KC-135 szállítógépének fedélzetén tesztelték alacsony gravitációt létrehozva a repülés során. A tesztek hatására az üléseket és a kapaszkodókat áttervezték, hogy az űrhajósok könnyebben tudjanak ki- illetve beszállni a járműbe. A járművet távvezérelt üzemmódban is vizsgálták, amely során értékes tapasztalatokhoz jutottak a járművet vezérlő botkormánnyal, a jármű gyorsulásával, valamint súlypontjának elhelyezésével kapcsolatban. Azokat a járműveket, amelyek megérték a prototípus fázist az Amerikai Hadsereg Yuma Proving ground nevű tesztállomásán vizsgálták éles körülmények között. Ez a terület felszíni viszonyait tekintve hasonló felépítésű a Hold felszínéhez, egyaránt rendelkezik finom homokborítású és sziklákkal teleszórt területekkel is.
Az automata felderítők frontján a Surveyor program keretében szintén felmerült egy automata rover Holdra juttatása. A Surveyor szondák eredeti feladata a Holdra történő sima leszállás végrehajtása és a felszín tulajdonságainak megvizsgálása volt a hatvanas évek közepén. A programban gyűjtött adatokat később az Apollo programban végzett leszállások kivitelezéséhez használták fel. Felmerült annak az ötlete, hogy az űrszondák magukkal vihetnének egy kisméretű nukleáris generátorral hajtott automata rovert is, ami alkalmas lenne egy nagyobb terület feltárására. Mivel azonban a program folyamatos csúszásokat szenvedett és minél hamarabb szükség lett volna arra a tapasztaltra, amit a leszállóegységek a landolásuk során összegyűjtenek, 1965-ben törölték a rover tervezetet, hogy magukra a leszállóegységekre koncentrálhassanak. 1968-ban egy újabb pályázati kiírás jelent meg, ezúttal olyan holdfelszíni járművek kifejlesztésére vonatkozóan, amelyek kettős üzemmódban, kézi irányítással és távvezérelve is képesek működni. A kiírásban ismét a Grumman, a Boeing-GM és a Bendix vett részt. Ezeket a járműveket az expedíciójuk alatt az űrhajósok vezetnék a felszínen, az expedíció végeztével pedig a Földről irányítva tudnák felfedezni a Hold felszínét. A Grumman járműve három egytengelyű részből állt, amelyeket rugalmas tagok kapcsoltak egymáshoz. A járműből egy méretarányosan kicsinyített tesztpéldány készült el, amit a gyakorlóterepen teszteltek. A Bendix is hasonló háromtengelyű járművet vizsgált. A GM háromtengelyűének első két tengelyét merev alváz kötötte össze, a harmadik tengely pedig utánfutóként egy rúd segítségével kapcsolódott a járműhez. Elkészült belőle egy tesztpéldány, amelynek mozgását tesztelték gyakorlóterepen. A Marshall Űrközpont is elkészített egy távirányítású kéttengelyű járművet Remote Controlled Dual Mode Test Article néven, ami sztereo kamerákkal volt felszerelve.
A Lunar Logistic System, a MOLAB és a duális üzemmódú járművek pályázatokban megszületett prototípusok a földi tesztkörülmények között jól vizsgáztak, de a súlykorlátozás miatt nem juthattak el a célpontjukhoz. Kivétel nélkül mindegyikük tömege meghaladta a Saturn V teljesítőképességét. Hamarosan azonban felmerült az igény egy olyan kisméretű, könnyű felszíni járműre, amely már beleférne a hardver adta keretek közé és aktívan tudná segíteni az asztronauták munkáját. 1967-re az Apollo repülések menetrendje egyre inkább kezdett kikristályosodni. Az egyes repüléseket az ábécé nagybetűivel jelölték. Az első holdra szállás, a G út során úgy tervezték, hogy az űrhajósok egy űrsétát tesznek majd. A későbbi küldetések, a H utak során ezt kettőre, majd a J utak esetében háromra tervezték növelni. Az űrhajósokra pedig egyre nagyobb távolság megtétele várt. Természetesen ekkor még nem volt pontos információ arról, hogy mennyire nehéz mozogni a felszínen, illetve mekkora távolságot lehet a kifáradás elkerülésével megtenni. Azt azonban mindenki sejtette, hogy az egyre növekedő távolság előbb utóbb eléri az emberi teljesítőképesség határát és nagy segítség lenne az űrhajósoknak valamilyen szállító jármű, amivel maximalizálni lehetne a terület feltárásának hatékonyságát. Az elképzeléseket tekintve egy ideig a kerekes jármű mellett egy repülőszerkezet is versenyben volt, de az LLTV-kel szerzett tapasztalatok alapján hamar elvetették az ötlete és megmaradt a guruló jármű koncepciója. Az LLTV-k a holdkompok landolásához gyakorlásként épített légi szerkezetek voltak. Egy lefelé néző sugárhajtóművet egy csövekből összehegesztett nagyjából négyszögletes szerkezet vett körül egy katapultüléssel a pilóta számára, valamint kis fúvókákkal a jármű irányításához. Az LLTV-k ritka nehezen repülhető szerkezetek voltak, rendszeres volt velük a baleset. Neil Armstrong-ot is csak a katapultülés mentette meg az egyik, majdnem katasztrófával végződő repülésé során, amikor az LLTV kis magasságon függeszkedve instabillá és irányíthatatlanná vált, majd a földbe csapódott.
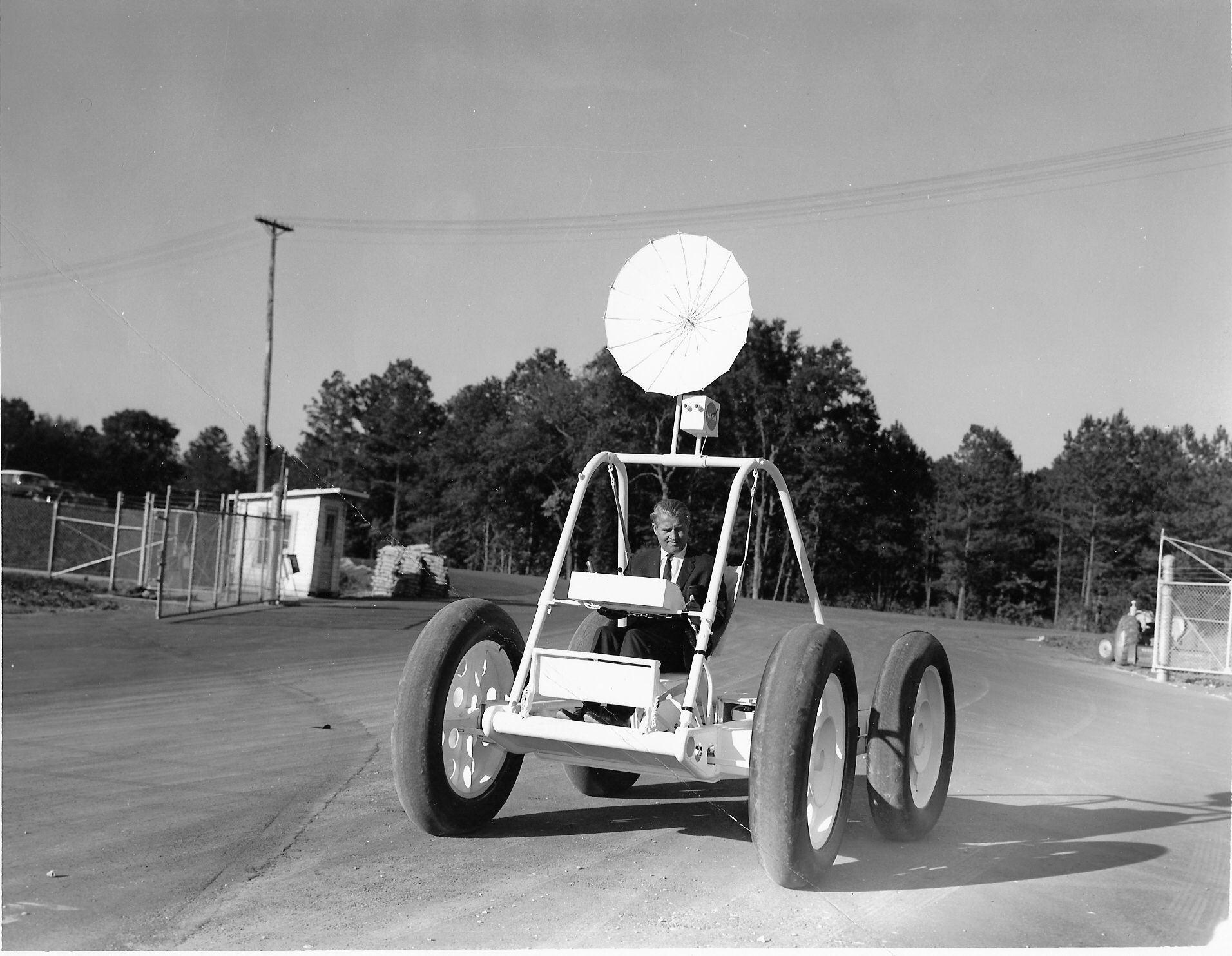
Wernher von Braun "repeszt" a Brown Engineering tesztjárműjével Huntsville-ben. Ez a jármű kulcsfontosságú tapasztalatokat
biztosított a késöbbi LRV tervezéséhez.
Forrás: Lunar Driving Simulator History

A GM 1965-ös MOLAB prototípusa, amit az Egyesült Államok Geológiai szervezete élesben is tesztelt
az arizonai Flagstaff-ban és felhasználták az űrhajósok geológiai kiképzése során is.
Forrás: Lunar Driving Simulator History
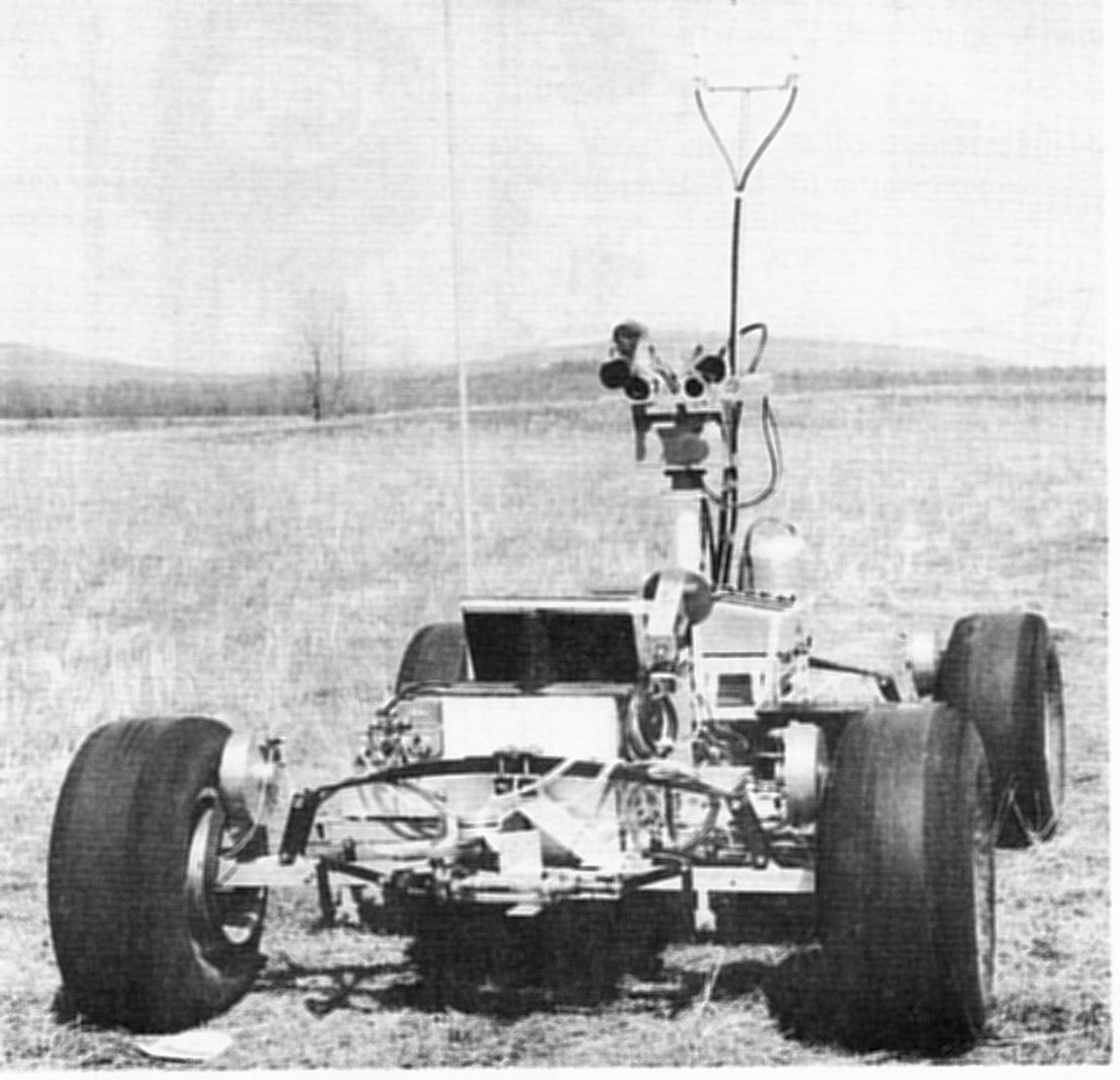
A Marshall Űrközpont távirányítású kéttengelyű járműve, a Remote Controlled Dual Mode Test Article.
Forrás: Lunar Driving Simulator History
1969. május végén megszületett a pályázati kiírás, amelyre két vállalat, a Bendix Corporation és a Boeing Company jelentkezett. A követelmények korántsem voltak egyszerűek. A járműnek tökéletes vákuumban és +- 121 °C hőmérséklet tartományban kellett üzemelnie. A lehető legkisebb tömeg és méret mellett maximálisan stabilnak kellett lennie statikus és dinamikus üzemben is. A Holdon sokkal nagyobb problémát okoz a járművek stabilitásának megőrzése, mint a Földön. A gravitáció értéke mindössze egy hatoda a földinek (1/6 G), ami miatt a kerekeken keresztül sokkal kisebb erő adódik át a talajra, sokkal kisebb a jármű tapadása. A tehetetlenségből származó erők, például a kanyarodásnál fellépő centrifugális erő azonban ugyanakkora, mint a Földön. Emiatt a jármű sokkal könnyebben elveszti a stabilitását, ezért a lehetőségekhez képest minél nagyobb nyomtávval és minél alacsonyabb súlyponttal kellett rendelkeznie. El kellett tudnia szállítani két űrhajóst, a tudományos eszközeiket, a kamerákat, valamint a holdi kőzetmintákat. Ez nagyjából 500 kg terhelhetőséget jelentett, ami majdnem kétszerese volt a tervezett üres súlynak. A járművet mindkét űrruhában lévő űrhajósnak tudnia kellett irányítania. 45°-os lejtőn is statikusan stabilnak kellett lennie. Emellett el kellett férnie a holdkomp tároló helyeinek egyikében. Nagyon fontos volt a jármű megbízhatósága, amit a minél egyszerűbb szerkezettel és redundáns rendszerek alkalmazásával kívánták elérni. Önálló hiba nem okozhatott repülés megszakítást és egy esetleges második hiba sem veszélyeztethette a legénységet. A holdpor újabb kihívást jelentett, amivel a járműnek meg kellett küzdenie. Rárakodva a felületekre a sötét holdpor sok hőt szív magába a Napból és gyorsan képes túlmelegíteni az adott szerkezetet. Emellett bekerülve a mechanikus részek közé képes tönkretenni azokat. Továbbá meg kellett oldani a hőháztartás megfelelő menedzselését. Végül, de nem utolsó sorban, a járműnek saját navigációs rendszerrel kellett rendelkeznie, amely segítségével az űrhajósok nemcsak azt tudják, hogy hol vannak, de mindig könnyedén vissza tudnak találni a holdkomphoz. A súlytakarékosság azonnal elvetette azt, hogy az LLS és MOLAB kiírásokban született behemótokkal járják a felszínt. Egy ennél sokkal könnyebb járműre volt szükség. A GM-nél Pavlics Ferenc gondolkodni kezdett egy könnyű, összecsukható szerkezetben. Hamarosan meg is alkotott egy 1:16 arányú makettet az ötlete alapján, ami elnyerte a NASA tetszését. Ez lett végül is az alapja a késöbbi LRV-nak.
A NASA hosszas megfontolás után 1969. október 29-én a Boeing-General Motors párost választotta ki a feladatra. A General Motors alvállalkozóként a kerekek, a felfüggesztés, a kormányzás, a fékek, valamint a meghajtó és vezérlő rendszerek kifejlesztéséért, a Boeing pedig a navigációs és a kommunikációs rendszerek kifejlesztéséért, valamint a jármű teszteléséért felelt. Az antennákat és a tudományos eszközöket a Johnson Űrközpont készítette és az űrhajósok a rover kinyitása és felszínre helyezése után szerelték föl rá. Annak érdekében, hogy a jármű elférjen a holdkomp tároló rekeszében az alvázat három részből alakították ki, amelyeket a kerekkel együtt egymásba lehet hajtogatni. Az elülső alvázrészen kaptak helyet az első kerekek és meghajtásuk, a hajtás vezérlés elektronikája, az akkumulátorok, a navigáció elektronikája, a TV közvetítés kamerája és annak energiaellátása. A középső részben kapott helyet a két asztronauta ülései a lábtartókkal és az övekkel együtt, a jármű irányításáért felelős műszerfal és botkormány, valamint az omnidirekcionális antenna a hang alapú kommunikációnak. A hátsó részben kapott helyet a két hátsó kerék és meghajtásuk, az eszközök és a holdi kőzetminták tárolói. Mindhárom rész hegesztett alumínium ötvözetből készült. Torziós rúgok segítették az első és hátsó részt, valamint a kerekeket a megfelelő pozícióba kerülni a jármű kinyitásánál. Az alváz kialakításánál nagy figyelmet fordítottak arra, hogy minden felesleges gramm tömegtől megszabaduljanak, de közben a szerkezet statikailag és dinamikaliga megfelelő szilárdságú legyen. A középső részt úgy alakították ki, hogy csak a holdi gravitációban bírja el a két űrruhában lévő űrhajós tömegét. A földi gyakorláshoz külön építettek egy 1 G-s tesztpéldányt, ami stapabíróbb volt. A négy kerék egyenként 81,8 cm átmérőjű, 23 cm széles és 5,4 kg tömegű volt. A kerekek kialakítás forradalminak számított. Bekker vezetésével Pavlics és kollegái 1963-64 környékén már építettek korábban egy hatkerekes háromtengelyes kisméretű távirányítású felderítő járművet. A járművel végzett terepgyakorlatok során fogant meg a fém kerék ötlete, amit később Pavlics Ferenc szabadalmaztatott. Korábban 1858-ban Thomas Rickett már feltalált egy fém szalagokból álló abroncsot, az LRV kerekei azonban ettől lényegében eltérő, teljesen egyedi kialakítást kaptak. A kerekek egy alumínium kerékagyon lévő cink bevonatú, 0,083 cm-es acél drótból font drótháló abroncsból álltak. Az abroncs futófelületének 50%-át titánból készült lemezek hozzászegecselésével burkolták be a tapadásnövelés érdekében. A Mississippi állambeli Vicksburgban végzett tesztek szerint az 50 % volt az optimális arány a 25°-os lejtők kerékcsúszás nélküli megmászásához. A kerekek fölé sárvédőket szereltek, hogy a por ne borítsa el a járművet és az utasait. A kerékabroncson belül volt egy 64,8 cm átmérőjű lökhárító, ami a kerékagyat védte. A konstrukció életképességét igazolták a terepen végzett próbák, amelyek során megállapították, hogy a legfeljebb 36 cm magasságú kövek nem okoznak károsodást az akár 14 km/h-val haladó kerekekben, ha nekik ütődnek.
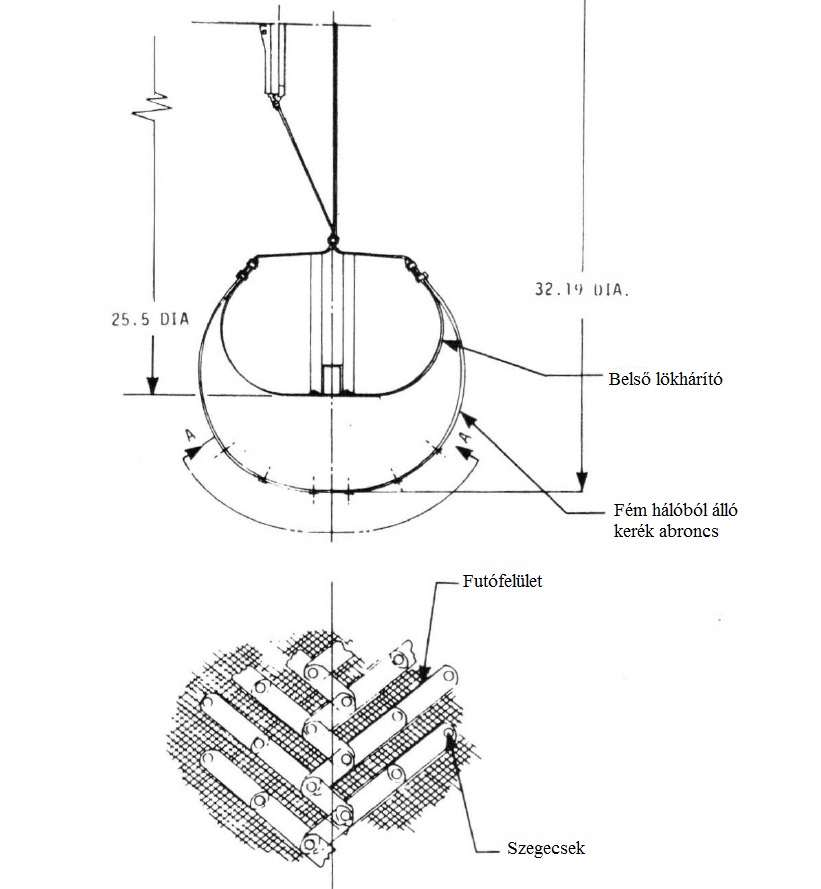
Az LRV kerekének szerkezete.
Forrás: Lunar Roving Vehicle Operations Handbook
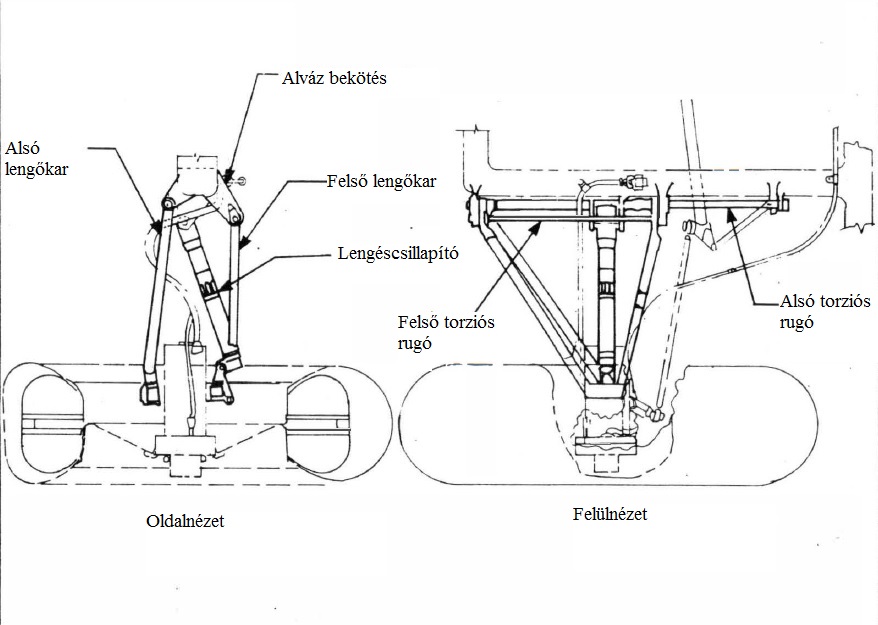
A felfüggesztés elemei.
Forrás: Lunar Roving Vehicle Operations Handbook
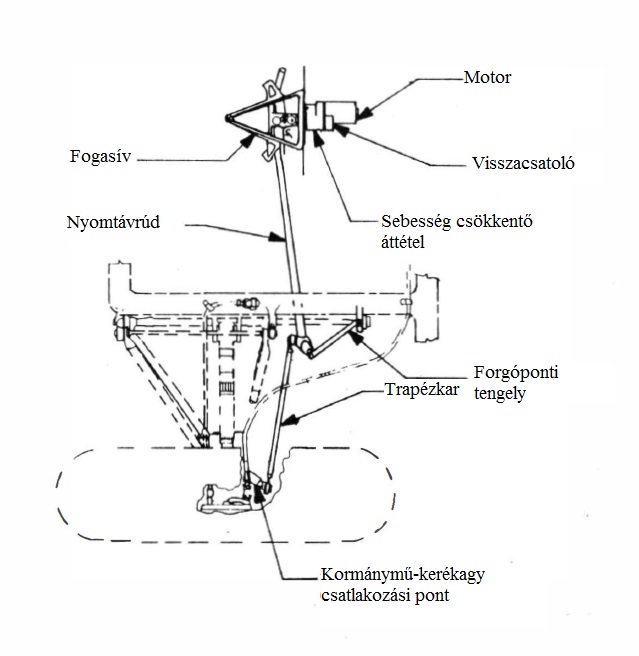
A kormánymű elemei.
Forrás: Lunar Roving Vehicle Operations Handbook
A felfüggesztés háromszög trapéz kereszt lengőkarokból állt, a felső lengőkar valamint a váz között elhelyezkedő két torziós rugóval és lengéscsillapítókkal kiegészítve. Teljesen megpakolva a hasmagasság 36 cm-nek adódott. A két torziós rugó eltérő hosszúságú volt. Mindkettő alkalmazása javította az utazási komfortot, a hosszabbik a terhelések 80 %-át vette fel, a rövidebbik pedig főleg a rover kinyitásánál segítette a kerekek megfelelő pozícióba kerülését. Amikor a rover még a holdkompban volt a gázos lengéscsillapítók összenyomott állapotban voltak és később a kinyitásnál vették fel az üzemi helyzetüket. Mindegyik kereket a saját 36 V-os 186 W (0,25 LE) teljesítményű egyenáramú motorja hajtotta egy 80:1 módosítású hullámhajtóművön keresztül. A motorok maximális fordulatszáma 10 000 1/min volt. A motor és a hullámhajtómű hermetikusan szigetelt összeghegesztett egységet alkottak és 0,51 bar nyomású nitrogén légkörrel voltak feltöltve, ami nemcsak a port tartotta távol, de a hő áramlást is segítette a kerékagyak felé, ahol az kisugárzódott az űrbe. A hullámhajtómű a motor nagysebességű kis nyomatékú forgását, kis sebességű nagy nyomatékú forgómozgássá alakította át, használatával helyet és tömeget spóroltak egy bonyolultabb fogaskerekes áttétellel szemben. A kerék egyszeri körbefordulása 9-szer aktiválta a kereknél elhelyezett mágneses szenzort, ami a kerékfordulatokat számolta. Abban az esetben, ha bármelyik kerék meghajtó rendszere meghibásodna az adott kerék szabadon futóvá tehető egy összefogó alkatrész eltávolításával. Ebben az esetben a többi három kerék még képes lenne hajtani a járművet. Számítások azt mutatták, hogy akár egy motor plusz hullámhajtómű is képes lenne mozgatni a teljes járművet. A kerekek mechanikus dobfékekkel voltak felszerelve, amelyeket a botkormányról lehetett vezérelni bowdenek segítségével. Ezenkívül a botkormány segítségével lehetett működésbe hozni a parkoló féket/kéziféket is. Ha az előbbi bármilyen hiba miatt beragadt, a botkormány tetején lévő gyűrű kihúzásával lehettet feloldani. A rovert elöl és hátul is független Ackermann-rendszerű kormányzással szerelték fel. A kerekek kormányzását 74,5 W-os (0,1 LE), 500 1/min fordulatszámú egyenáramú motorok végezték, egy-egy tartozott mindkét kormányrendszerhez. A motor kihajtása 257:1 módosítású áttételen keresztül csatlakozott egy fogasívhez, amihez a jobb- és baloldali nyomtávrudak, illetve trapézkarok csatlakoztak. Ha az össze kereket kitérítették kormányzás során 3,1 m-es fordulósugár adódott, ami rövidebb volt, mint a jármű saját hossza. Hiba vagy túlérzékenység esetén az űrhajósok le tudták kapcsolni egymástól függetlenül az első vagy hátsó kerekek kormányzását. Ezen felül mechanikusan le is tudták zárni az adott kormányrendszert az egyenes állásba egy gyűrű kihúzásával. Az újbóli feloldás is lehetséges volt egy speciális szerszám segítségével, amit a hátsó részben helyeztek el. A kerekeket átfordítani a botkormánnyal az egyik maximális kitérésű állásból a másikba 5,5 másodpercig tartott.
A meghajtás vezérlőrendszere, a DCE (Drive Control Electronics) az elülső alvázrészen kapott helyet. A botkormány által adott potenciométerek jelei ide futottak be és az egység szélesség modulált impulzus jelekké alakította át őket, amelyeket aztán a meghajtó motorok felé továbbított. Ez azt jelenti, hogy megadott frekvencia szerint négyszögjelek és a közöttük lévő jelnélküli szakaszok követték egymást, a kettő szakasz szélességének arányát pedig a botkormány állása határozta meg. Ha a botkormány középen volt, nem volt kivezérelt négyszögjel, így meghajtás sem. Ha előre tolták a botkormányt a négyszögjel szélessége elkezdett nőni, míg a jelnélküli szakasz szélessége pedig csökkeni, így egyre nagyobb meghajtó erő lett kivezérelve a kerekekhez. Ha teljesen előretolták a botkormányt, akkor a jelnélküli szakaszok eltűntek és 100 %-os teljesítménnyel forogtak a kerekek. A meghajtó motorok jelei 1500 Hz, a kormányrendszerek motorjainak jelei pedig a finomabb vezérlés érdekében 10 000 Hz frekvenciájúak voltak. Az ülések alumínium csövekből, alumínium üléslapból és nylonból készült hálószerű háttámlából álltak. A háttámla hálós szövete elegendő nyílást biztosított az űrhajósok hátizsákjain lévő szelepekhez való hozzáféréshez. Az üléseket a jármű felszínre helyezése után nyitották ki. A két ülés között egy kartámasz, mindkettő előtt egy-egy állítható lábtámasz és egy-egy velcro-ból készült biztonsági öv tartozott. A biztonsági övek az űrhajósok combjait és ölét fogták át. A gyenge gravitációban még az igen enyhe huppanok és azt eredményezték, hogy az űrhajósok lebucskáznak az üléseikből, így a biztonsági öv igen jó szolgálatot tett a Holdon is. A lábtartók nagy segítséget nyújtottak a járműből történő kiszálláshoz. Fontosságukra a Brown Engineering járműjével a KC-135 szállítógépben tett repülések során jöttek rá. A jármű irányítását a két ülés között lévő T alakú botkormánnyal lehetett megvalósítani. Ha előre tolták, akkor a jármű megindult előrefelé, ha hátra akkor fékezni kezdett. Elforgatásával pedig kormányozni lehetett. Hátramenetet a botkormányon lévő átkapcsoló gomb segítségével lehetett kapcsolni. Teljesen hátrahúzva a borkormányt pedig be lehetett húzni a parkoló/kézi féket. A botkormányt egy rugó húzta vissza középállásba, ha nem történt beavatkozás. A kormányba épített redundáns potenciométerek küldték a jelet a meghajtásról a DCE-nek. Fékezésnél a botkormány és a fékek között mechanikus kapcsolat jött létre bowdeneken keresztül.
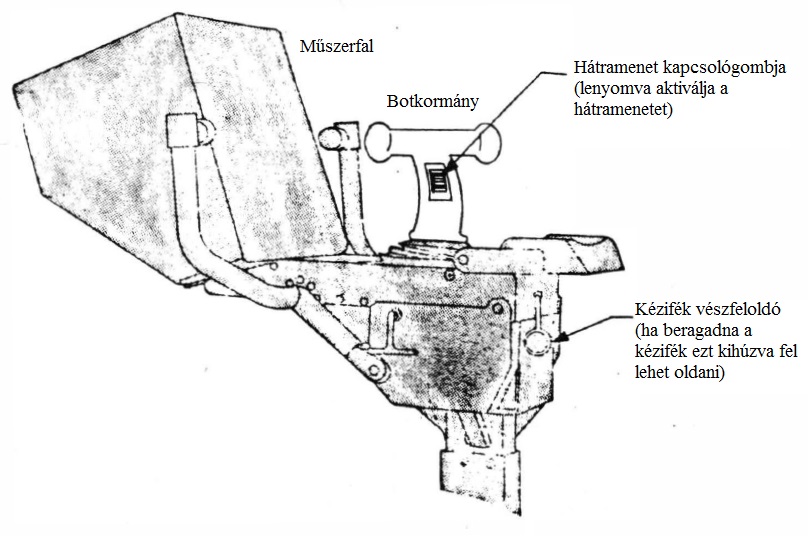
A középen lévő irányító konzol kialakítása. A nagy "doboz" volt a műszerfal, elötte pedig a botkormány kapott helyet.
Forrás: Lunar Roving Vehicle Operations Handbook
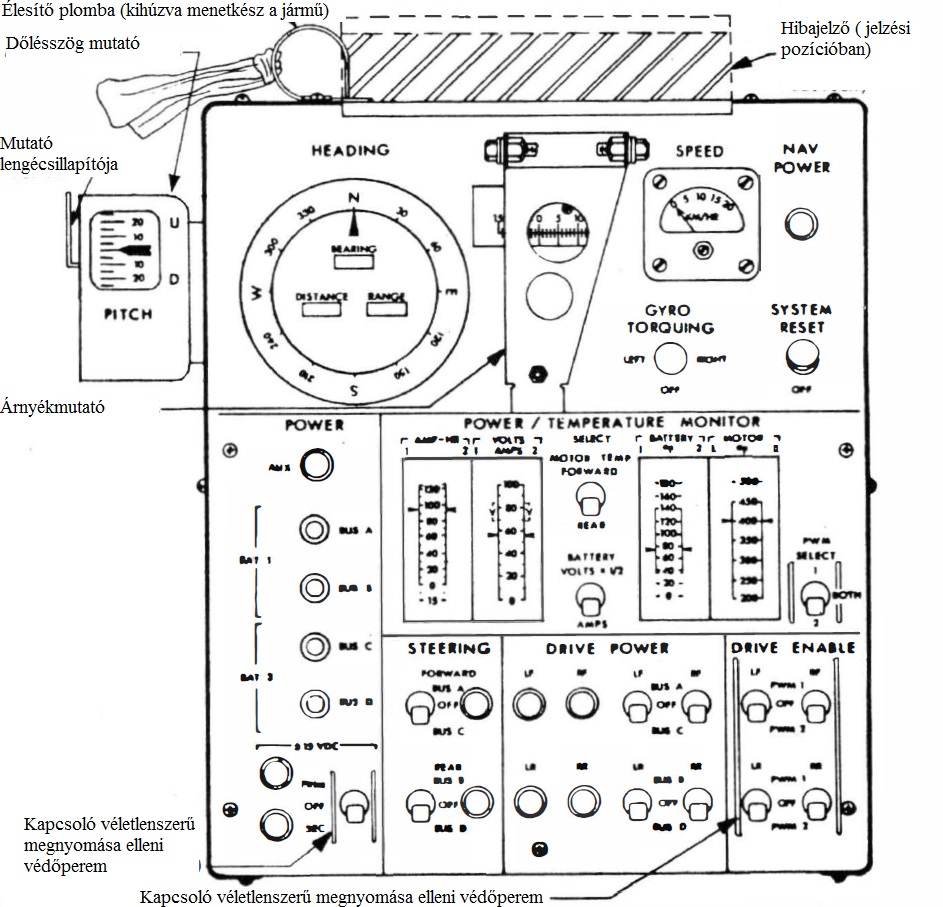
Az LRV műszerfala.
Forrás: Lunar Roving Vehicle Operations Handbook
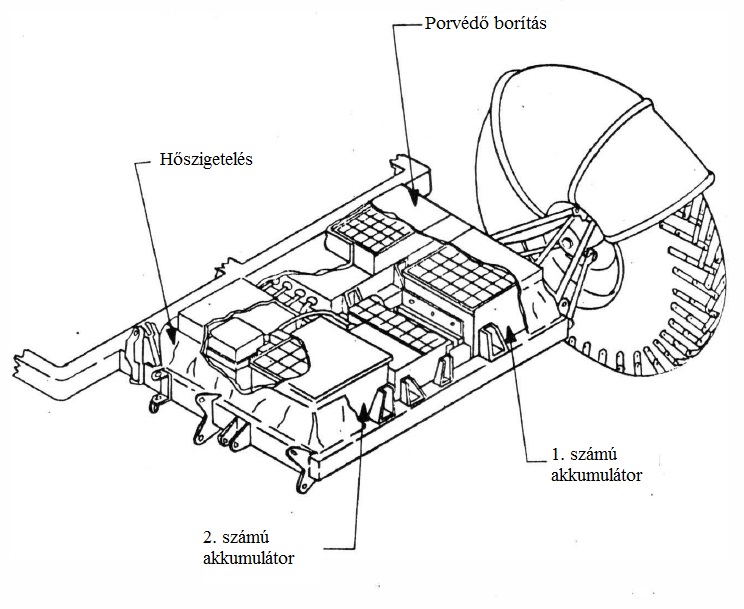
Az energiaellátás elemei.
Forrás: Lunar Roving Vehicle Operations Handbook
A két űrhajós előtt középen helyezkedett el a műszerfal. Felső része a navigációs rendszer műszereit, alsó része az elektromos rendszer műszereit tartalmazta. A műszerek kijelzőin lévő mutatók és skálák prométiummal lettek bevonva. Ez a radioaktív elem a lantanoidák csoportjába tartozik, az általa kibocsátott sugárzás miatt a sötétben foszforeszkáltak a műszerek. A bal felső sarokban kapott helyet a dőlésszög mutató, ami +-25 °-ig volt skálázva. Mellette a navigációs rendszer iránytűjét és azon belül három kijelzőt, a Bearing, Distance és Range indikátorokat helyezték el. A Bearing indikátor a holdkomp roverhez viszonyított irányát, a Range indikátor a holdkomp rovertől mért távolságát, a Distance indikátor pedig a teljes megtett távolságot mutatta. A navigációs kijelző mellett kapott helyet az árnyékmutató, ami a rover irányát segített meghatározni a giroszkóppal párhuzamosan a Nap állása alapján. A holdi égen a Nap 14 nap azaz 336 óra alatt halad át tehát egy 8 órás munkaidő alatt nagyjából azonos pozícióban marad. A műszerfal felső részének jobboldalán kapott helyet a sebességmérő, ami 0-tól 20 km/h volt skálázva és a jobb hátsó kerék adatai alapján mutatta a jármű sebességét. Körülötte három kapcsoló a Nav Power, Gyro Torquing és System Reset helyezkedtek el. A Nav Power nevű megszakító segítségével hiba esetén a főelosztók közvetlenül a navigációs rendszerhez jutathattak energiát. A Gyro Torquing kapcsolóval a navigációs rendszer adatait lehetett frissíteni. A System Reset kapcsolóval pedig az iránytű kijelzőit lehetett nullázni. A műszerfal tetején egy hibajelző kapott helyet, ami akkor jelzett, ha valamelyik akkumulátor 52 °C-nál, vagy bármelyik motor 205 °C-nál jobban felmelegedett. Ekkor kipattant egy zászló belőle, ami jól látható volt az űrhajósok számára. A műszerfal alsó részén helyezték el a Power, a Power/Temperature Monitor, a Steering, a Drive Power és a Drive Enable kapcsolókat. A Power szekció megszakítókat tartalmazott, amelyek a két akkumulátort és négy elosztót kapcsolták össze. Ezen felül itt volt még a kommunikációs rendszer kisegítő megszakítója és két megszakító a szélesség modulált impulzusjelek számára. A Power/Temperature Monitor szekció amper- és voltmérőt, valamint két hőmérőt tartalmazott, amik az akkumulátorok és motorok adatait mutatták. A Steering szekció két kapcsolót és megszakítót tartalmazott, egyet-egyet az elülső és hátsó kormányzó motorok számára. A mellet lévő Drive Power szekció hasonló kapcsolókat és megszakítókat tartalmazott a négy meghajtómotorhoz. A Drive Enable szekció segítségével lehetett kiválasztani azt, hogy a négy motorhoz a kettő közül melyik szélesség modulált impulzusjel csatorna adjon jelet. A jármű navigációs egysége három részből állt: egy giroszkópból (DGU - Directional Gyro Unit), ami az irányt mérte, kerekenként egy-egy kerékfordulatszám mérőből, amik a megtett távolságot és sebességet mérték és egy számítógépből (SPU - Signal Processing Unit). A számítógép a harmadik leggyorsabban forgó kerék fordulatszáma, valamint a giroszkóp elfordulása alapján kalkulálta ki a mozgás irányát és a megtett út hosszát. A harmadik leggyorsabban forgó kerék fordulatszámának használatára a kerékcsúszás minimalizálása miatt volt szükség. Ezután az egység az irány és megtett távolság alapján kiszámolta a jármű mindenkori helyzetét a kiindulási ponthoz, azaz a holdkomphoz képest. A tolatás némi hibát generált a számítás során, mert a fordulatszámlálók logikája nem tudta értelmezni az ellentétes irányba való forgást. Mivel azonban a hiba mértéke elhanyagolható volt, úgy döntöttek a tervezés során, hogy nem ölnek további dollármilliókat a hátrafelé haladás megfelelő kiszámításába. A navigációs rendszer pontossága a holdkomp irányát tekintve +- 6°, a holdkomp távolságát tekintve pedig +- 2% volt 5 km sugarú körön belül.
A rover passzív hőmérséklet szabályzó rendszerrel lett felszerelve, amelyet speciális felületi bevonatok és festékek, radiátorok, hőszigetelő borítás és hőtárolók alkottak. A holdkomp tároló rekeszében a rovert egy hővédő burkolat fedte a repülés alatt. Az akkumulátorok hőmérsékletét 4,5 és 51,6 °C között kellett tartani, míg a többi berendezés -34,5 és 85 °C közötti hőmérsékletet is elviselt. A működés során keletkező felesleges hőt hőtárolókban tárolták, ilyen hőtároló volt a két akkumulátor. Minden űrséta végén az űrhajósok a rovert a Nap állásának megfelelően leparkolták és felemelték a porvédő borítást arról a három kvarcüveg tükörről, amelyek kisugározták a felesleges hőt az űrbe. A tükröket menetközben a portól védeni kellett, mert a rájuk rakódó holdpor csökkentette a hatékonyságukat. A tükrök egészen addig sugározták ki a hőt, amíg az akkumulátorok hőmérséklete le nem hűlt 7,2 °C-ra. Ekkor bimetál rugók automatikusan becsukták a porvédőket, így megszűnt a további hőkisugárzás. Az akkumulátorok mellett porvédő takarta a DCE, az SPU és a DGU egységeket is. A hővédő burkolatok többrétegű alumíniummal bevont mylar és nylon-ból készültek egy beta cloth nevű legkülső réteggel, ami a kopástól és a direkt napfénytől védte az anyagot. A műszerfal egy üvegszálas felerősítéssel volt termikusan elválasztva a jármű többi részétől. A konzol külső felülete hőálló festékkel volt bevonva, míg a műszerek kijelzőit tartalmazó oldalán feketére oxidálták az alumínium felületet a zavaró fényvisszaverődés csökkentése érdekében. A motorokhoz és a többi berendezéshez két darab 36 V-os ezüst-cink nem újratölthető akkumulátor biztosította az energiát 121 amperóra kapacitással. Mindkét akkumulátor 23 cellából állt és nátrium-hidroxid elektrolitot tartalmazott. Az akkumulátoroknak egyedül is el kellett látniuk a rover minden fogyasztóját. A megfelelő hőmérsékleten tartásukról hővédő burkolat, a belső nyomás megfelelő szinten tartásáról pedig leeresztő szelepek gondoskodtak. Az akkumulátorok hőtárolóként is viselkedtek, az egyes számú akkumulátor a navigációs rendszer számítógépével, a kettes akkumulátor pedig a giroszkóppal volt hővezető kapcsolattal összekötve.
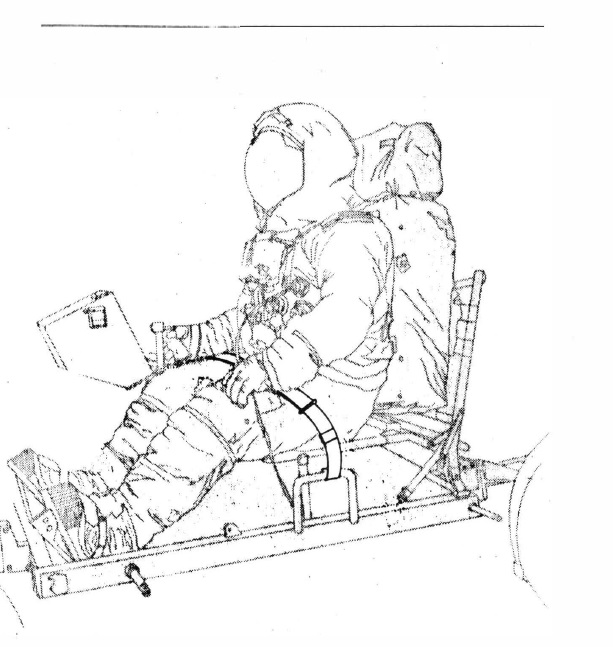
A biztonsági öv elhelyezkedése az utazás közben.
Forrás: Lunar Roving Vehicle Operations Handbook
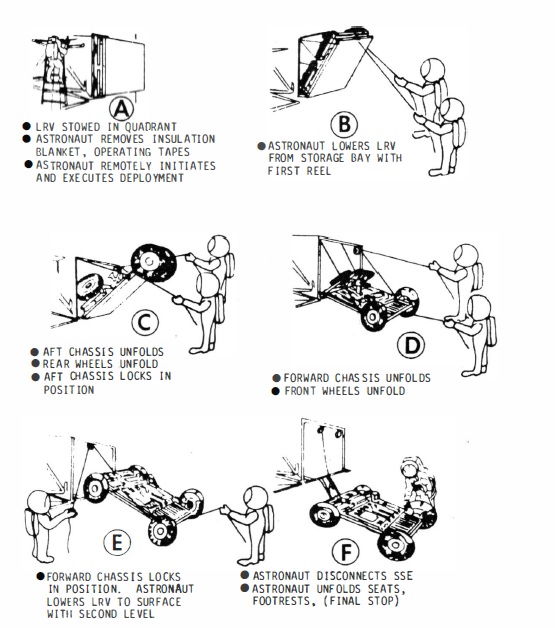
Az LRV leengedésének és szétnyitásának lépései. Az összehajtogatott rover a holdkompon belül úgy helyezkedett el, hogy a
középső alvázrész alja volt kívül, miközben a jármű eleje a talaj felé nézett. Az űrhajósok egy kötelekből, szíjakból és
csigákból álló szerkezet segítségével tudták leengedni a talajra. A rover elejét és hátulját két szíj tartotta, amelyeket
csigákon keresztül lehetett lejjebb engedni. A - Első lépésként az egyik asztronauta a létrán állva eltávolította a rover előtt
lévő hővédő burkolatot, majd megindította a leengedés műveletét. B - A következő lépésnél már mindkét űrhajós a felszínen állt a
két szíjat fogva. Az egyikük folyamatosan engedte a rover hátulját a szíj kiengedésével egyre lejjebb. C - Ahogy rover alvázának
középső része elnyílt a holdkomp falához képest nagyjából 45°-kal a hátsó alvázrész előrenyílt és rögzült a hátsó kerekekkel
együtt. D - Következő lépésként második űrhajós a második szíj meghúzásával elhúzta a rovert a holdkomptól, miközben társa
tartotta annak hátulját. Közben, ahogyan távolodott a rover a holdkomptól előrenyílt az elülső alvázrész és rögzült az első
kerekekkel együtt. E - Végül az elülső részt tartó szíj kiengedésével a jármű leért a talajra elejével a holdkomp felé nézve. F - Az
asztronautáknak innentől nem maradt más dolga, mint lekötni a köteleket és szíjakat a járműről, kihajtani az üléseket és
lábtartókat, felszerelni az antennákat és bepakolni az eszközöket. Majd az elektromos rendszert bekapcsolva a jármű
menetkészé vált.
Forrás: Lunar Roving Vehicle Operations Handbook
Az elkészült LRV nyomtávja 1830 mm, tengelytávja 2286 mm, teljes hossza 3100 mm, teljes magassága pedig 1140 mm volt. Üres tömege 210 kg-nak adódott. Az összehajtogatott rover a holdkompon belül úgy helyezkedett el, hogy a középső alvázrész alja volt kívül, miközben a jármű eleje a talaj felé nézett. Az űrhajósok egy kötelekből, szíjakból és csigákból álló szerkezet segítségével tudták leengedni a talajra. A rover elejét és hátulját két szíj tartotta, amelyeket csigákon keresztül lehetett lejjebb engedni. Első lépésként az egyik asztronauta a létrán állva eltávolította a rover előtt lévő hővédő burkolatot, majd megindította a leengedés műveletét. A következő lépésnél már mindkét űrhajós a felszínen állt a két szíjat fogva. Az egyikük folyamatosan engedte a rover hátulját a szíj kiengedésével egyre lejjebb. Ahogy rover alvázának középső része elnyílt a holdkomp falához képest nagyjából 45°-kal a hátsó alvázrész előrenyílt és rögzült a hátsó kerekekkel együtt. Következő lépésként második űrhajós a második szíj meghúzásával elhúzta a rovert a holdkomptól, miközben társa tartotta annak hátulját. Közben, ahogyan távolodott a rover a holdkomptól előrenyílt az elülső alvázrész és rögzült az első kerekekkel együtt. Végül az elülső részt tartó szíj kiengedésével a jármű leért a talajra elejével a holdkomp felé nézve. Az asztronautáknak innentől nem maradt más dolga, mint lekötni a köteleket és szíjakat a járműről, kihajtani az üléseket és lábtartókat, felszerelni az antennákat és bepakolni az eszközöket. Majd az elektromos rendszert bekapcsolva a jármű menetkészé vált. Úgy tervezték, hogy az Apollo program J jelű expedíciói visznek magukkal rovereket, ez négy repülés jelentett az Apollo 16-tól 19-ig, éppen ezért négy darab LRV-t rendelt a NASA a Boeing-GM-től. A holdi példányok mellett elkészítettek egy prototípust, egy 1 G-s gyakorlójárművet, két 1/6 G-s tesztpéldányt a felszínre helyezés műveletének kidolgozásához, egy vibrációs tesztpéldányt, egy mérnöki makettet, egy tömegmodellt és egy olyan példányt is, amelyben az alrendszerek működését tesztelték. A rover vezetésének gyakorlásához megépítettek egy szimulátort, amely két ülésből, az LRV tervezett botkormányából és műszerfalából, valamint egy TV-monitorból állt. A monitor egy kamerával volt összekötve, amely egy a Lunar Orbiter űrszondák fényképei alapján összeállított görgethető vászon képét mutatta. A kamera úgy volt elhelyezve a vászon fölött, hogy nagyjából azt a látványt mutassa, amit az LRV ülésében ülő űrhajós látna a Hold felszínéből. A botkormány mozgatása alapján egy számítógép mozgatta a vásznat, illetve magát a kamerát. A vászon mozgása felelt meg az előre és hátra menetnek, míg a TV kamera mozgása felelt meg az oldalirányú, illetve a fölfelé és lefelé történő mozgásnak.

David Scott és James Irwin, az Apollo 15 legénységének tagjai, készülnek föl az expediciójukra a sivatagos gyakorlóterepen a földi gyakorlópéldány segítségével.
Forrás: NASA
{kind=link}
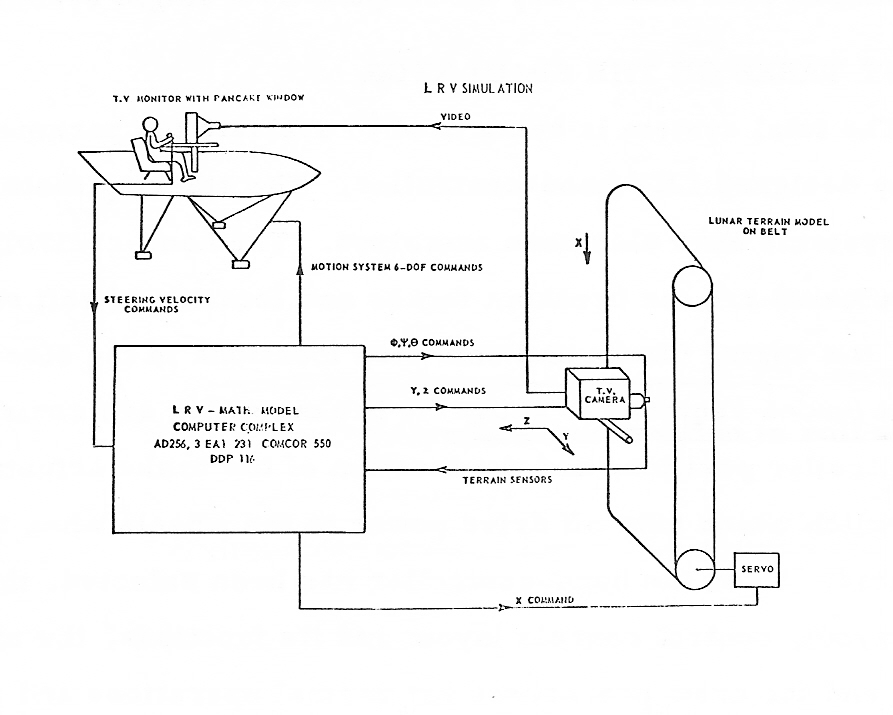
Az LRV földi szimulátorának rendszervázlata. A rendszer a kiadott mozgási parancsok alapján mozgatta a térképet a TV kamera elött,
valamint a szimulátor ülése alatti állványt.
Forrás: Lunar Driving Simulator History
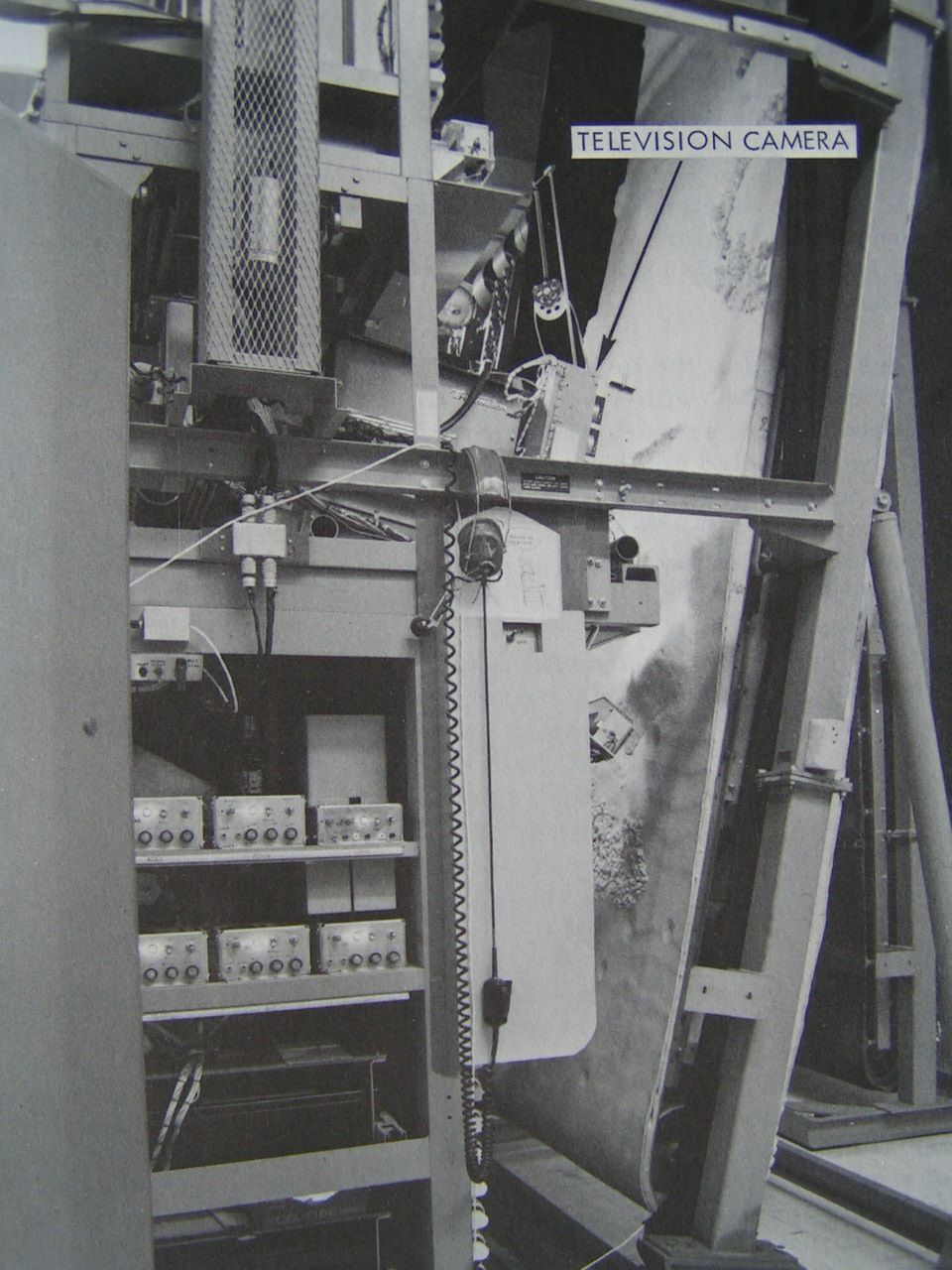
A szimulátor térképét mozgató szerkezet és a TV kamera.
Forrás: Lunar Driving Simulator History
Az első LRV-t az Apollo 16 vitte volna magával, ezért a repülés legénységét, John Young parancsnokot és Charlie Duke holdkomp pilótát jelölték az LRV földi tesztelésére. A páros 1970 elején kezdett neki a földi gyakorlópéldányok kipróbálásához. A Marshall Űrközpont mellett felépíttettek egy kráterekkel beszórt tipikus holdfelszíni tájat, amit finom állagú vulkanikus salakkal borítottak be. A gyakorlások során Young és Duke javaslata alapján két változtatást is végeztek a roveren a Boeing mérnökei. A botkormány eredetileg pisztoly alakú volt, de az űrhajósok a kesztyűben nehezen tudtak boldogulni vele, ezért azt javasolták, hogy legyen sokkal egyszerűbb T alakú. A másik javaslat a navigációs rendszerre vonatkozott. Eredetileg ugyanis a Boeing úgy alakította ki a navigációs rendszert, hogy a pontos helyzetet térkép koordinátákkal mutassa a kijelzőjén. Az űrhajósok azonban mindenképpen ragaszkodtak ahhoz, hogy a navigációs rendszer mindig a holdkomp irányát és távolságát mutassa a roverhez képest. Az utóbbi változtatás miatt a rover fejlesztése túllépte a költségkeretet. 1970 novemberében változás állt be az Apollo programban. A NASA-t érintő költségvetési megszorítások miatt töröltek két Apollo expedíciót, az Apollo 15-t és a 19-et. Ez technikailag azt jelentette, hogy az Apollo 15 H jelű repülésről át lett minősítve J úttá, és legénysége megkapta az első LRV kipróbálásának a lehetőségét. Ezért az első vulkanikus gyakorlóterepen tartott teszteken már az Apollo 15 űrhajósai David Scott parancsnok és James Irwin holdkomp pilóta vezette az 1 G-s földi tesztpéldányt. A szerződés szerint a Boeing-GM-nek 19 millió dollár fejében 1971. április 1-ig kellett leszállítani az első működőképes példányt, ami ezen a napon meg is érkezett a Kennedy Űrközpontba. A határidőt tehát sikeresen tartották a költségvetés azonban jóval túllépte a keretet, végül 38 millió dollárba került a jármű kifejlesztése és négy holdi példány elkészítése. Az Apollo programmal ekkor már nagyrészt kritikusan bánó sajtó fel is tette a kérdést, hogy "mi került ennyibe három darab golf kocsin".
A negatívumok ellenére az első LRV készen ált a használatra, már csak a megfelelő terepet kellett kiválasztani. Több izgalmasnak ígérkező jelentkező közül a Hold egyik hegyvidéki terepét, az Appenninek hegylánc lábánál fekvő Hadley nevű területet választottak. Ez a hegység a Hold északnyugati részén fekvő Mare Imbrium (Esők tengere) szélén helyezkedik el nagyjából 700 km-re északra a holdi egyenlítőtől. A Mare a nagyjából 4 milliárd évvel ezelőtt lezajlót Késői Nagy Bombázás során keletkezett egy hatalmas méretű meteorit becsapódásakor az akár ötezer méter magasra is felnyúló Appenninek hegyláncot pedig a hatalmas erejű becsapódás gyűrte fel. A programban részt vevő geológusok úgy gondolták, hogy az Appenninek hegylánc környékén a Hold és vele együtt az egész Naprendszer legidősebb kőzeteit lehetne megtalálni, ezért esett erre a területre a NASA vezetésének és David Scott parancsnoknak is a választása. A tervek szerint a hegylábhoz leszálló holdkomptól kiindulva három nap alatt három űrsétával tárják fel a környéket. Az LRV-t már az első űrséta során alkalmazni szerették volna, köré építették fel a kinti tevékenység menetrendjét. Az Apollo 15 szerelvénye 1971. május végén került ki a 39A indítóállásba indulását pedig júliusára tűzték ki. 1971. július 26-án reggel keleti parti idő szerint 9:34-kor az Apollo 15 legénysége - David Scott parancsnok, James Irwin holdkomp pilóta és Al Worden parancsnoki modul pilóta - és velük együtt az első LRV elindult a Hold felé. Tizenkét perc repülés után elérték a Föld körüli parkoló pályát, majd másfél fordulat megtétele után az S-IVB fokozat újbóli begyújtásával megindultak a Hold irányába.
Három napos problémamentes repülés után Dave Scott és James Irwin átszálltak a holdkompba, Al Worden pedig a parancsnoki űrhajóban maradt a Hold körüli pályán. Július 30-án délután 6:16-kor sikeresen végrehajtották a sima landolást. 31-én az első űrséta kezdetén a rovert problémamentesen kicsomagolták és leengedték a talajra. Ezután kihajtották az ülések háttámláit és beállították a lábtartókat, valamint felszerelték az antennákat és bekapcsolták a navigációs rendszert. A járművet ezt követően feltöltötték szerszámokkal és a kőzetminták tároló zsákjaival. Az egész művelet nagyjából egy órát és 45 percet vett igénybe. Scott tett egy rövid teszt utat, amely során rögtön kiderült, hogy nem működik a rover elsőkerék kormányzása. Szerencsére a hátsókerék kormányzás rendesen üzemelt és korábban sokat gyakoroltak a Földön ilyen üzemmódú vezetést, így nem volt akadálya az elindulásnak. A tesztút után az űrhajósok felpattantak a járműre és megindultak az első állomás, a délnyugatra fekvő Elbow-kráter felé. A roverrel való utazás sokkal egyenetlenebb volt, mint ahogyan azt előzetesen gondolták, a jármű sokat pattogott ide-oda, ahogy az út közbeni kisebb krátereken áthajtottak. 10 km/h maximális sebesség mellett a biztonsági övek nagyon jó szolgálatot tettek. A jármű elejére szerelt kamera minden állomásnál követte az űrhajósok tevékenységét. Mielőtt megálltak a kamera antennáját a Földre irányították, a kamera mozgását pedig az irányító központ egyik munkatársa, Ed Fendell irányította. Menet közben, ahogyan előzetesen várták, a jármű folyamatos keréknyomot hagyott maga után. Ez abban az esetben segített volna az űrhajósoknak visszatalálni a holdkomphoz, ha a rover útközben elromlik. Az első út végén az Elbow-krátertől visszafelé indulva a navigációs rendszer segítségével kellett visszatalálniuk a holdkomphoz. Közben kiderült, hogy a rover nem igazán szereti a lejtőket, az első kerekek könnyen ellássák magukat és a jármű hamar megpördül a laza talajban. 2 óra és 15 perc utazás után érkeztek vissza a holdkomphoz, az irányszögben volt némi eltérés, ennek ellenére a navigációs rendszer jól vizsgázott. Nagyjából nyolc km tettek meg az első űrséta alatt.

Az Apollo 15 legénysége. Balról-jobbra David Scott parancsnok, Alfred Worden parancsnokimodul pilóta és James Irwin holdkomp pilóta. Mögöttük
az expedició új sztárja, az LRV, elöttük pedig egy Hold körüli pályára szánt kisméretű műhold látható, amit az Apollo 15 parancsnoki űrhajója vitt magával.
Forrás: NASA
{kind=link}
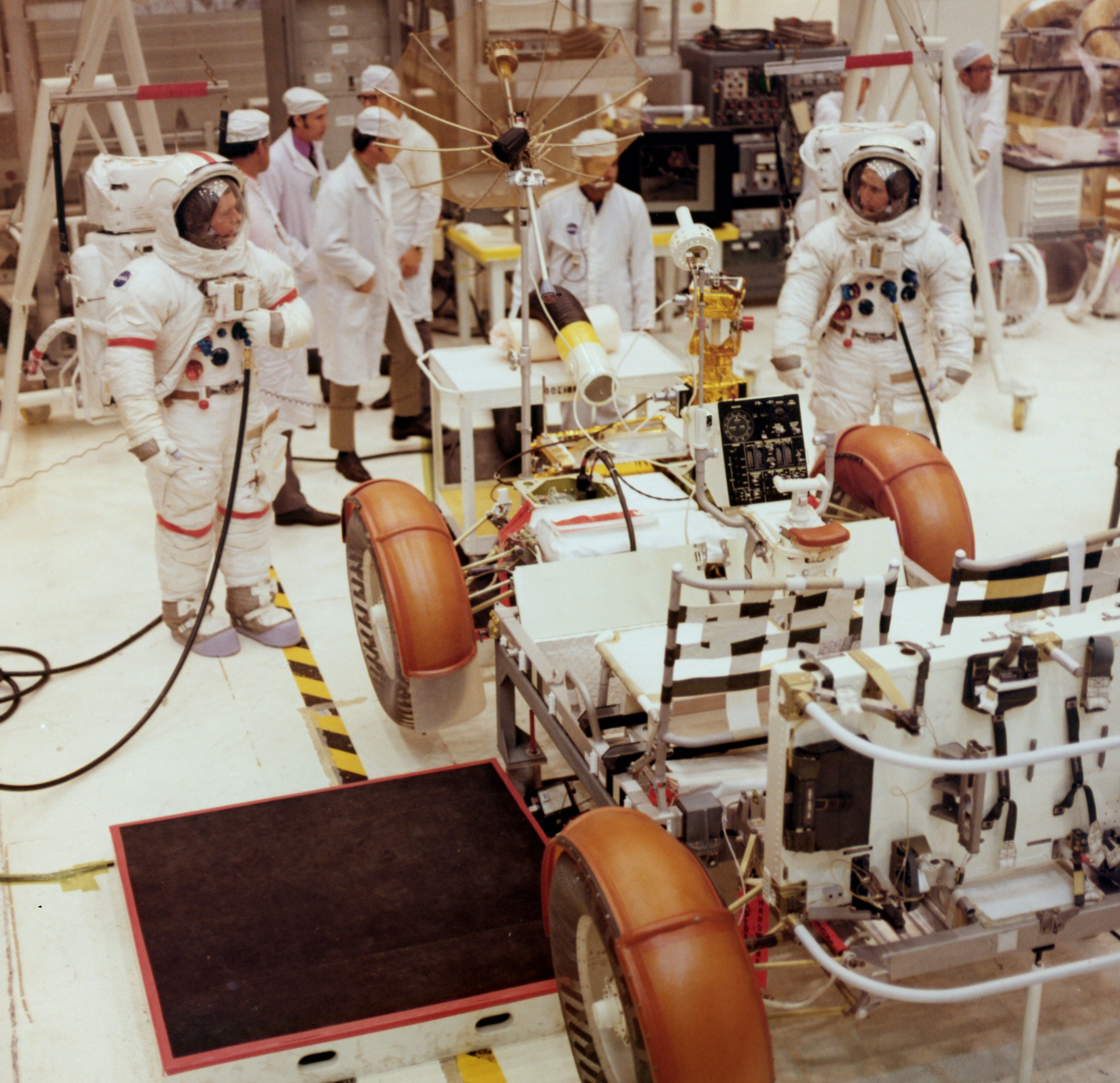
Az Apollo 15 legénysége űrruhában teszteli az LRV-t.
Forrás: NASA
{kind=link}
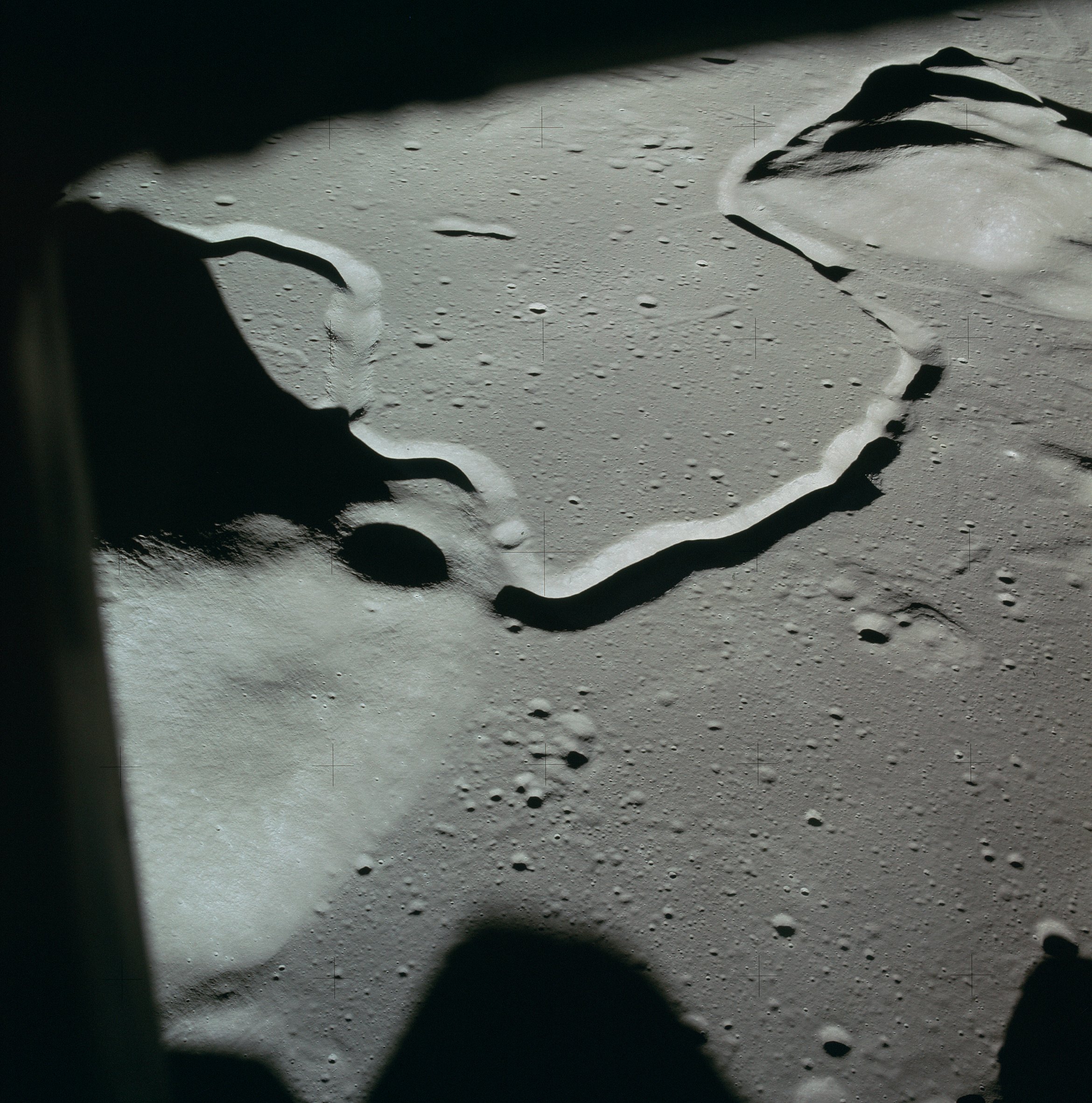
Az Apollo 15 leszállóhelye, az Appenninek hegylánc lábánál fekvő Hadley nevű területet. A képen kanyargó árok a Hadley Rille nevű ősi láva csatorna.
Forrás: NASA
{kind=link}

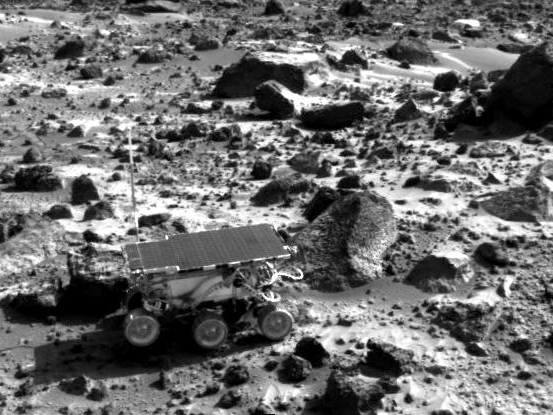
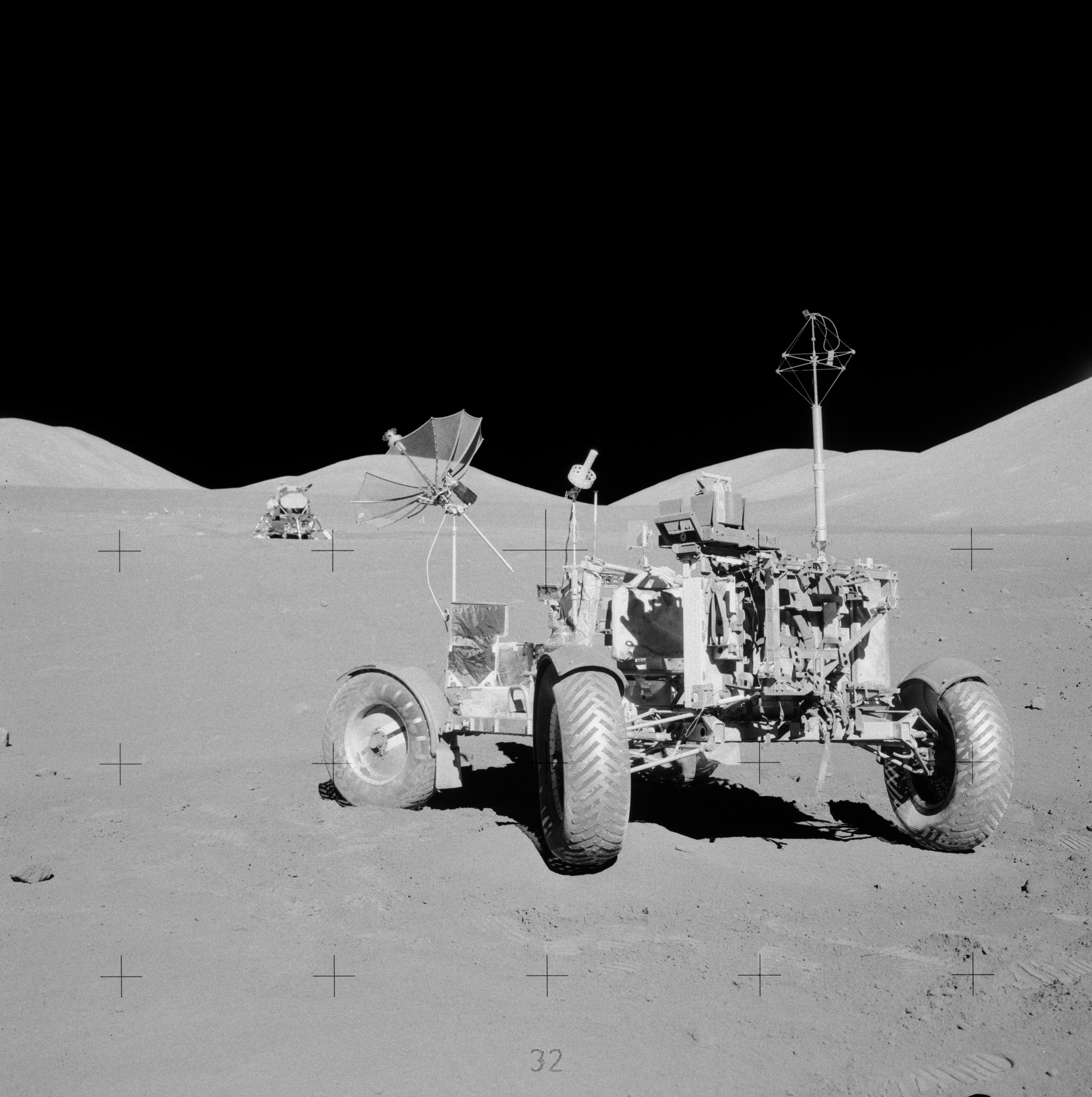
Az új jármű a Hold felszínén.
Forrás: NASA
{kind=link}

Ezen a képen jól látszik a tükröződés elkerülése végett feketére bevont műszerfal a kép felső részén. Mellette a tájékozódást segítő térképlapok helyezkednek el.
A kép alsó részén az is látható, hogy a kerekek mellett már elég sok regolit (holdpor) halmozodott fel a vázon.
Forrás: NASA
{kind=link}
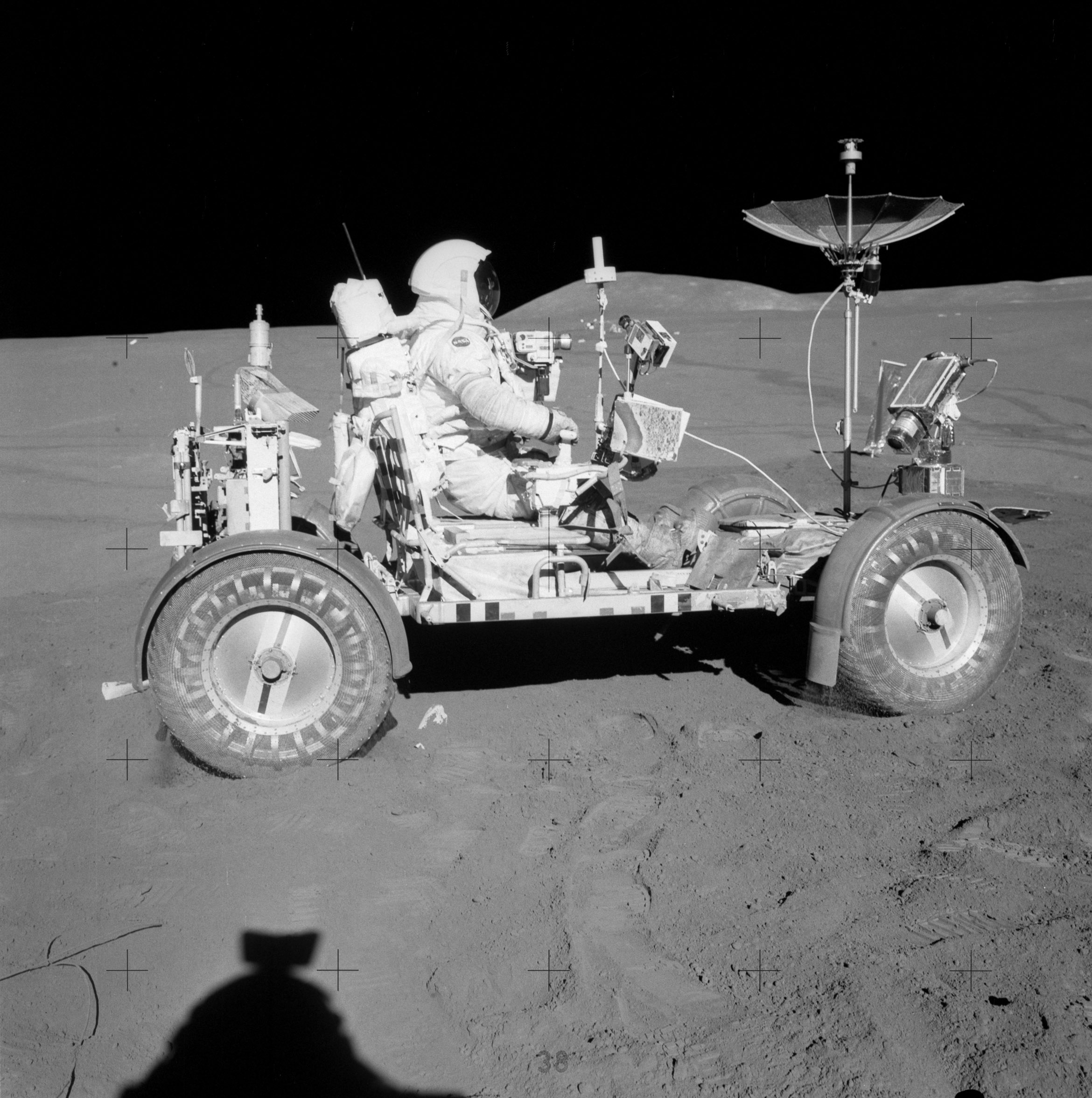
Oldalról készült kép az LRV-ról, alul a Falcon nevű holdkomp árnyéka látható.
Forrás: NASA
{kind=link}

A holdi hegyvidék esetenként igen nehéz terepet jelentett. Miközben Scott az előtérben lévő sziklát fotózta Irwin-nek kézzel kellett
tartania az LRV-t, nehogy az a lejtős terepen elguruljon.
Forrás: NASA
{kind=link}
Másnap az első kerekek kormányzása végre életre kelt és kipróbálhatták a négykerék kormányzást is. A jármű ezen a napon dél felé indulva a hegyoldal lábánál haladt felfelé először lankásabb 8 - 10 fokos, majd meredekebb 30 fokos lejtőn. A mozgás során nem volt probléma, amikor viszont megálltak egy olyan meredek helyen sikerült leparkolni, ahol az egyik kerék a levegőben lógott, miután az űrhajósok leszálltak a járműről. A jármű kis tömege miatt félő volt, hogy a lejtős terepen elgurul, ezért egy helyen egy érdekesebb szikla megvizsgálásánál az egyik űrhajós tartotta a járművet, amíg társa a sziklát tanulmányozta. A jármű nagyjából 100 km-es hatótávval bírt, de a holdkomptól mindig csak akkora távolságra távolodhattak el, ami még biztonságosan gyalog is megtehető. A hátizsákban lévő oxigén készletek fogyása pedig egy egyre zsugorodó körrel jelezte a megtehető távolságot. Ezen a napon körülbelül 5,5 km haladtak a délen fekvő Spur-kráterig, majd ugyanekkora távolság megtételével értek vissza a holdkomphoz. A harmadik napon kiderült, hogy a rovert a folyamatos ellenőrzések ellenére egy hibával a fedélzetén indították útnak. Az űrhajósok korábban három mélységi mintavételi lyukat fúrtak a talajba egy fúrószár segítségével, amely a talajmintát a fúrószárában tárolta. A fúrószárat három darabra kellett szerelni ahhoz, hogy beférjen a holdkompba. A szétszedéshez egy kis satut szereltek fel a rover hátuljára. Scott és Irwin már a földi gyakorlásoknál észlelte és jelezte azt a Boeing mérnökeinek, hogy a satu nem megfelelően működik. A vizsgálat során kiderült, hogy az egyik alkatrész a gyári rajzon fordítva volt felrajzolva. A tervrajzot javították, valahogyan azonban mégsem jutott el a repülésre érett példányokat összeszerelő csapathoz és az LRV 1 is hibás satuval érkezett a Holdra. Szerencsére a nem működő elsőkerék kormányzás mellett ez volt az legsúlyosabb probléma, ami az első LRV-t sújtotta. Később pedig kiderült, hogy a fúrószár befér egyben is a holdkompba. A harmadik űrséta során egy előzőekhez képest kisebb távolságot, nagyjából 1,8 km tettek meg a nyugatra fekvő Hadley Rille nevű ősi láva csatorna partjához. Az űrséta végeztével pedig elérkezet az egész expedíció vége. Scott a rovert mintegy száz méterre parkolta le a holdkomptól, így a kamerája közvetíthette annak Holdról való felszállását. A Holdon maradt LRV 1 tábláján a következő szöveg állt: ”Az emberek első kerekei a Holdon. Idehozta a Falcon” (ez volt a holdkomp neve). Bár az előző részből már kiderült, hogy a Lunohod 1 volt az első kerekes jármű a Holdon, az LRV 1 azonban valóban első volt azok között a járművek között, amik embereket szállítottak égi kísérőnk felszínén. A rover új korszakot nyitott az Apollo programban, messzemenőkkel nagyobb terület bejárására és tanulmányozására adott lehetőséget. Segítségével találta meg Scott és Irwin a Teremtés köve nevű anortozitos szikladarabot, ami a Naprendszer keletkezésének legkorábbi időszakában, legalább 4 milliárd évvel ezelőtt keletkezett. Az Apollo 15-öt pedig pontosan ezért küldték a Hadley-hez, hogy ilyen idős köveket találjon. Apollo 15 expedíciója során összesen 27,8 km tettek meg az LRV 1-el 3 óra és 2 perc alatt. 12,5 km volt az egy nap alatt megtett legnagyobb távolság és légvonalban 5 km–re távolodtak el legmesszebb a holdkomptól.

Az Apollo 16 expedíció legénysége, John Young parancsnok (hátul), Charles Duke holdkomp pilóta (LRV-ban ül) és Ken Mattingly pózol az LRV-val.
Forrás: NASA
{kind=link}
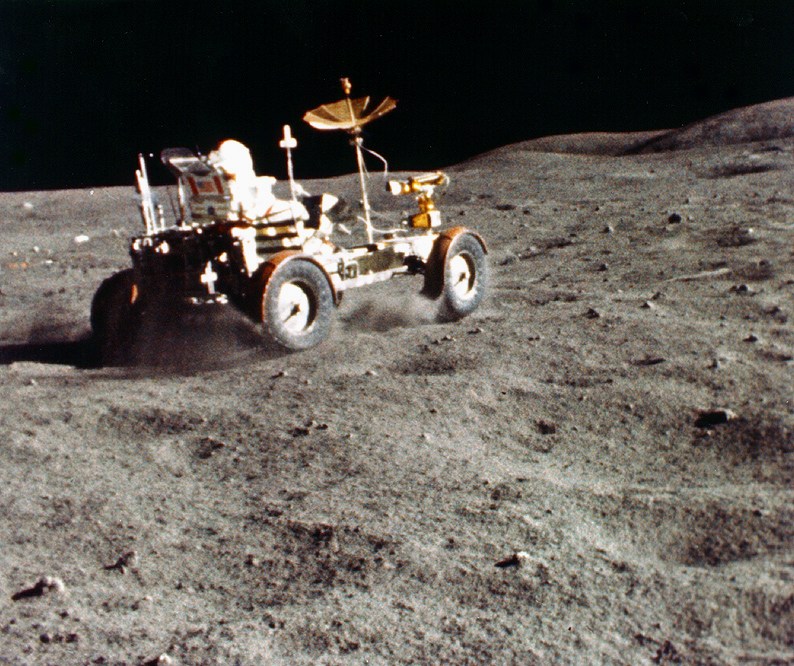
John Young "repeszt" a Hold felszínén.
Forrás: NASA
{kind=link}
1972-ben az Apollo 16 következett az LRV 2-vel. A leszállás célpontjába a Descartes-fennsík került, egy vulkanikusnak vélt terület, ami a Descartes-krátert veszi körül a Hold látható oldalának nagyjából a közepén, az egyenlítőtől enyhén délre. Az Apollo 16 legénysége - John Young parancsnok, Charlie Duke holdkomp pilóta és Ken Mattingly parancsnoki modul pilóta - 1972. április 16-án keleti parti idő szerint 12:54-kor startolt a Kennedy Űrközpont 39A indítóállásából. A Holdig tartó út eseménytelenül telt el, a Hold körül azonban a holdkomp és a parancsnoki űrhajó szétválása után a parancsnoki űrhajó főhajtóművében indokolatlan rezgések keletkeztek, ami miatt elhalasztották a leszállást. A két űrhajó órákon keresztül repült kötelékben egymáshoz közel a Hold felett, amíg sikerült úrrá lenni a problémán. Végül Young és Duke 21-én szálltak le a Cayley-formáció nevű területen körülbelül 50 km-re délre a Decartes-krátertől. Az Apollo 15-höz hasonlóan az első űrséta a rover kihajtogatásával és felszínre helyezésével kezdődött. Az LRV 2-vel azonban több probléma is adódott. A kihajtogatásánál a négyből három kereket kézileg kellett kinyitni és kezdetben nem működött a hátsókerék kormányzás. Az első űrséta elején Young tesztútra indult, miközben Duke egy 16 mm-es kamerával vette a műveletet kissé távolabbról. Az első űrséta során nyugati irányban nagyjából másfél kilométert tettek meg a Flag nevű kráterhez, majd visszafelé jövet megálltak a Spook-kráter mellett, amely nagyjából félúton helyezkedett el a Flag-kráter és a holdkomp között. 22-én a második űrséta során valahogyan magától megjavult a hátsó kormányzás, azonban újabb kellemetlenségek adódtak a rover körül. Pakolás során Young véletlenül ráejtett egy geológiai kalapácsot a rover egyik hátsó sárvédőjére, ami az ütéstől letört és később el is veszett. Ennek hatására az expedíció további részében a felvert por kezdett rárakodni a berendezésekre és túlmelegedést valamint hajtásbeli problémákat kezdett okozni, idővel leállt a hátsókerék hajtás. Ezen a napon dél felé indultak el és 3,8 km-t megtéve eltérték a Stone-hegység lábát. Innen visszafelé haladtak a saját nyomaikat követve körülbelül 1 kilométert, amely alatt két helyen is megálltak. A második állomás után nyugatnak fordultak és körülbelül 1 kilométert haladtak a Wreck-kráter szélig. Innen a nap végén 2,5 km megtételével jutottak vissza a holdkompig. A harmadik napra a maradt leghosszabb út. Észak felé indultak elhaladtak a Gator- és a Palmetto-kráterek mellett, majd enyhén északnyugati irányba fordulva 4,5 km után érték el a Smoky-hegység lábánál lévő North Ray-krátert. Innen kitérő nélkül a saját nyomaikat követve jutottak vissza a holdkompig. Az Apollo 16 végül nem talált vulkanikus kőzeteket a Cayley-formáción, a holdkéreg szerkezet hasonló volt a korábbi expedíciók során már feltárt terültekhez. A második rover a problémák ellenére összesen 26,7 kilométert tett meg 3 óra és 26 perc alatt. 11,6 km volt a legnagyobb egy nap alatt megtett távolság és 4,5 km-re távolodtak el légvonalban legmesszebb a holdkomptól.

Eugene Cernan parancsnok az LRV gyakorló példányában ülve, jobbján Harrison Schmitt holdkomp pilótával mögötte pedig
Ronald Evans parancsnoki modul pilóta pózol együtt a háttérben a Kennedy Űrközpont 39A indítóállásában álló utolsó holdexpedició
Saturn V hordozórakétájával. A kép bal felső sarkában látható misszió emblémán Apollo napisten már a NASA távlati céljai felé fordítja tekintetét.
Forrás: NASA
{kind=link}

A Taurus-Littrow völgy az Apollo 17 holdkompja ablakából.
Forrás: NASA
{kind=link}
Következett az egész Apollo program és egyben a roverek utolsó útja, az Apollo 17 repülése. 1972. december 7-én keleti parti idő szerint éjfél után 33 perccel a Saturn V hordozórakéta a sötét éjszakát fényes nappallá változtatta a 39A indítóállás környékén, ahogy utasaival - Eugene Cernan parancsnok, Harrison Schmitt holdkomp pilóta és Ronald Evans parancsnoki modul pilóta - és a hármas számú LRV-val a fedélzetén elindult a Hold felé. Céljuk a Hold látható oldalának észak keleti részén található Taurus-Littrow völgy volt. A völgy a Mare Serenitatis (Derültség tengere) délkeleti szélén található, három hegy, a South Massif, az East Massif és a North Massif fogja közre. A Holdig való három napos repülés simán, eseménytelenül zajlott és 11-én este Cernan és Schmitt megérkeztek a holdkomppal a Hold felszínére. A rover kicsomagolása után az első űrséta alatt elhajtottak a délre nagyjából 1 kilométerre lévő Steno-Apollo-kráterhez, majd visszatértek a holdkomphoz. Első napon Cernan rögtön elkövette azt a hibát, amit Young is, ráejtette a kalapácsot a jobb hátsó sárvédőre, aminek hatására a sárvédő egy része letört. A por miatti problémák elkerülése érdekében a második űrséta előtti éjszaka az irányító központban megterveztek és összeállítottak egy „pót” sárvédőt azokból az eszközökből, amik az űrhajósok rendelkezésére is álltak odafönt. Houstonban az űrruhába bújt John Young tesztelte le a felszerelésének műveletét a földi gyakorló roveren. Ez alapján Cernan a második űrséta elején térképfedőlapok, csipeszek és ragasztó segítségével új sárvédőt eszkábált össze. A művel sikeres volt és a portól származó meghibásodások immáron nem fenyegették a harmadik rovert. Ezen a napon sebességi világrekordot állítottak fel, Cernan 17,5-18 km/h-val repített a holdjárót, ami annyira pattogott útközben, hogy Schmitt-nek alkar és kézfájdalmai jelentkeztek a fényképezőgép szorongatásától. Második űrsétán egy nagy kört tettek nyugat felé a Bronte-, a Nansen-Apollo-, a Lara-, a Shorty-, a Victory-, a Horatio- és a Camelot-kráterek érintésével. Harmadik napon ismét egy kör megtétele következett ezúttal kelet felé. Cernan és Schmitt elautózott a Shakespeare-, majd a Bowen-Apollo-kráterek mellet, végül a Cochise- és a Van Serg-kráterek érintésével jutottak vissza a holdkomphoz. A harmadik űrséta után nem maradt más hátra mint a Földre való visszatérés. Cernan annyira megkedvelte a rovert, hogy egyik sárvédőjét visszahozta magával. A harmadik roverrel járták be a legnagyobb távolságot a programban: összesen 35,9 km-t 4 óra és 26 perc alatt. 20,1 km volt leghosszabb egy nap alatt megtett út hossza és légvonalban 7,6 km-re távolodtak el a holdkomptól. Miután az Apollo 17 visszatért a Holdról a Földön egyetlen repülőképes példány, az LRV 4 maradt. Nem lévén következő misszió, ahol felhasználhatták volna végül feleslegesen lett legyártva. Később a washingtoni National Air and Space Museum gyűjteményébe került.

Gene Cernan beülni készül az LRV baloldali ülésébe. A Földön nagyon egyszerű mozdulatsort a Holdon a
merev űrruha igen nehézkessé tette. Az űrhajósoknak gyakorlatilag rá kellett ugraniuk az ülésre, miközben
még a levegőben ülő pozícióba húzták a lábaikat.
Forrás: NASA
{kind=link}

A térképlapokból és ragasztósszalagból "összeeszkábált" pót sárvédő, amely kiválóan ellátta feladatát.
Forrás: NASA
{kind=link}
Az Apollo 17 repülésével hivatalosan véget ért a Hold felfedezésének emberekkel folytatott szakasza és a NASA figyelme több, mint húsz évre teljesen elfordult égi kísérőnktől. 1971-ben még a North American foglakozott olyan négykerekű járművek ötletével, amelyek önállóan vagy egymáshoz kapcsolva vonatszerű szerelvényben tudnának dolgozni a Hold felszínén. Az LSV, azaz Lunar Sortie Vehicle négykerekű alvázán kúpos kerekkel rendelkezett és többféle - túlnyomásos kabin, energiaellátó és rakományt szálló - felépítményt vihetett magával. Ezután azonban csak a nyolcvanas évek végén került elő újból a holdi járművek gondolata. 1989-ben egy 90 napig lakott holdbázisról szóló NASA tanulmányhoz terveztek két különböző rendeltetésű járművet, a LOTRAN-t és a MOSAP-ot. A LOTRAN (LOcal TRANsportation) egy LRV-hoz hasonló kétszemélyes nyitott rover lett volna. Két személyen felül 850 kg-nyi egyéb rakományt vagy további két személy is tudott volna szállítani és 15 km/h maximális sebesség mellett 100 km-es hatótávval rendelkezett volna. A háromtengelyű jármű tengelyei gömbcsuklósan kapcsolódtak egymáshoz, ami egyenetlen terepen is biztosította a megfelelő tapadást. A jármű manuálisan és automata üzemmódban is tudott volna közlekedni. A MOSAP (MObile Surface APplication traverse vehicle) egy zárt, túlnyomásos kabinnal rendelkező négykerekű konstrukció lett volna 3000 km hatótávval és 10 km/h átlagos sebességgel. A jármű elején két manipulátor kar kapott helyet, amelyek a geológiai mintavételt végezték volna. A járműveket különböző kabinelrendezéssel lehetett volna ellátni, önállóan illetve több jármű vonatszerűen összekapcsolódva is tudott volna működni. A Boeing Daylight Rover nevű 1990-es tanulmánya szintén egy olyan négykerekű, zárt, túlnyomásos kabinú járművet tartalmazott, amelynek az elején két robotkar kapott helyet. Ezek végezték volna a geológiai mintagyűjtést, csökkentve ezzel az űrséták számát. A mintákat egy légzsilipen keresztül lehetett volna a jármű belsejébe juttatni. A 25 tonna tömegű jármű futóműve négy oldalsó állványon elhelyezett négy darab kettős kerékből állt volna. Az energiát üzemanyagcellák biztosították, amelyek segítségével 80 napig tudott volna üzemelni két személlyel a fedélzetén. Maximális hatótávolsága 100 km, legnagyobb sebessége pedig 4 km/h lehetett.
1992-ben a NASA és az USRA (Universities Space Research Association) közötti szerződés keretében a Virginiai Műszaki Főiskolán terveztek egy zárt kabinú holdjárművet. A jármű két túlnyomásos hengerből állt, amelyeket egy flexibilis átjáró kötött össze. A terv elöl és hátul Ackermann kormányzással és nyolc darab 2 méter átmérőjű kerékkel rendelkezett. A teljes jármű 11 méter hosszú, 7 tonna tömegű lett volna, energiáját radioizotópos energiaforrással biztosították. 29,44 km/h maximális sebességgel négy személyt tudott volna szállítani 14 napig és 2000 km-es maximális hatótávolságig. Maximálisan 26,5°-os lejtőkre tudott volna felmászni és 1,7 méter széles hasadékokat tudott volna leküzdeni. A tervek között akadtak egészen extrém elgondolások is. Az austini Texasi Egyetem MSTS nevű 1999-es tanulmányában egy olyan rovert vizsgált, amelynek felfújható kabinja két félkör alakú rácsos szerkezetre volt felfüggesztve, miközben a két rácsos szerkezet két oldalon két-két mozgó négykerekes platformhoz kapcsolódott. Az Athlete (All-Terrain Hex-Limbed Extra Terrestrial Explorer) tanulmány egy olyan járműről szólt, ami képes rakományt szállítani, valamint karbantartási és szerelési műveleteket végezni a Holdon. A jármű szerkezetét egy hatszögletű fémváz és a hozzá kapcsolódó hat darab hat szabadságfokú végtagszerű, végén kerékkel rendelkező láb alkotta. A 2005-ös tanulmány gurulni tudott volna a megfelelően sima terepen, illetve lépkedni a kevésbe egyenletes terepeken. A végtagok manipulátorként is használhatóak voltak. Több prototípust is elkészítettek a járműből. A fejlesztést a JPL, a Johnson Űrközpont, az Aimes Kutatóközpont, a Stanford Egyetem és a Boeing közösen végezte. Ezek mellet rengeteg egyéb ötlet is született és folyamatosan születnek is tervek a jövő holdjárműveivel kapcsolatban, azonban egyelőre mindegyikük megmaradt tervszinten. A Holdon dolgozó kerekekkel ellátott járművek története azonban szerencsére nem ért véget az LRV-val. Bár több mint negyven évnek kellett eltelnie a Lunohod-ok és az LRV után addig, amíg újból keréknyomok tűntek föl égi kísérőnk felszínén, de a 2010-es években megérkeztek a 21. század első holdjárművei az égitestre. Ezeknek a járműveknek a története azonban a sorozat egy későbbi epizódjában kerül majd ismertetésre.
- Dancsó Béla Holdséta - Novella Kiadó 2004
- Űrhajózási lexikon, Akadémia Kiadó - Zrínyi Katonai Kiadó, 1981
- Veterán Autó és Motor 2021/2 lapszám - Oldtimer Media Kft.
- The Lunar Roving Vehicle – Historical Perspective
- The Apollo Lunar Roving Vehicle
- Lunar Roving Vehicles
- Lunar Roving Vehicle Operations Handbook
- Looking Back at NASA’s Strange Mobile Lunar Laboratory
- Lunar Driving Simulator History
- Lunar rovers
- Man Must Explore: Remembering Apollo 15, Five Decades On
- Apollo 16: The Flight of ‘Billy Rubin’ and ‘Typhoid Mary’
- ‘Like a Big Ol’ Freight Train’: 45 Years Since the Launch of Apollo 17
Kapcsolódó írások
Kerekeken a Naprendszerben 1.
A Lunohod holdjárók