Kerekeken a Naprendszerben 3. rész
Első járművek a Marson
A sorozat harmadik részében a hetvenes, a nyolcvanas és a kilencvenes évek konstrukciói kerülnek bemutatásra. Az 1970-es években a Szovjetunió szerette volna a Holdra kifejlesztett roverek technológiáját a Mars és a Vénusz kutatásában is felhasználni. Megindult számos ígéretes szerkezet tervezése, megfelelő hordozórakéta és pénzügyi források hiánya miatt azonban csak két kis marsjárót sikerült a vörös bolygóra eljuttatni 1971-ben. Egészen 1997-ig kellet arra várni, hogy a Lunohod-ok megfelelő követőt kapjanak, az új jármű azonban a tengeren túlról indult útnak. Az amerikai Sojourner rover sikeresen elérte a Marsot és 83 napig működött a felszínén.
Annak az ötlete, hogy távirányítású felszíni járműveket használjanak a Naprendszer bolygóinak kutatásában nem sokkal a Lunohod koncepciója után született meg a szovjet űrkutatás tervező részlegeinél. A Lunohod 1 sikeres holdi működése pedig igazolta ezeknek a járműveknek a fontosságát és hasznosságát. Az űrkutatási program vezetőinek és a tervezőnek a figyelme ezután a két legközelebbi bolygószomszédunk, a Vénusz és a Mars felé fordult. Ebben az időben még sem a Mars, sem a Vénusz felszínén nem járt ember alkotta eszköz, azonban a Marsz és a Venyera űrszonda programok adatai alapján a Mars kínálkozott az alkalmasabb terepnek, amelynek felszíni viszonyai közelebb állnak a Holdhoz és a Földhöz, mint az extrém forró felszínű Vénuszhoz. A Marsra küldendő járművel kapcsolatban azonban rögtön felmerült két nagy probléma, amelyek erősen megkötötték a tervezők kezét. Amikor a Föld és a Mars legközelebb helyezkedik el egymáshoz, akkor is körülbelül 90 millió kilométer választja el a két bolygót egymástól. Ez nagyjából 225-ször nagyobb a Föld - Hold távolságnál. A Lunohod-oknál fennálló 3 - 20 másodperces rádiójel késleltetés a Mars esetében 5 - 20 percesre nőtt. Ez pedig azt jelentette, hogy a járművet nem lehet távirányítással vezérelni a Mars felszínén, mert szükség esetén nincs lehetőség az azonnali beavatkozásra. Az új járműnek autonómnak kellett lennie és önállóan kellett boldogulnia felszínen. Ez talán még nem jelentett volna akkora problémát, ha nem párosul egy elég szigorú tömegre vonatkozó korlátozással. Az 1970-es évek elején a Proton rakéta volt a legnagyobb teljesítményű hordozórakéta a szovjet űrkutatás eszközei közül, amely körülbelül 6 tonna hasznos terhet tudott a Mars felé indítani. Ebbe bele kellett, hogy férjen az űrszonda, a leszálló egység és maga a rover is. Ebből kifolyólag a leendő marsjárónak a Lunohod-hoz képest nagyon kisméretűnek és kistömegűnek kellett lennie. A tervezési feladatot a Lunohod sikeres megalkotása miatt leningrádi VNII-100 tervezőiroda kapta meg. Alexander Kemurdzsian vezetésével egy 150 mérnökből álló csapat dolgozta ki a rover terveit. A fent említett két kritérium egy igencsak furcsa szerkezet eredményezet, egy kisméretű sítalpakon mozgó rovert, a PrOP-M-et.
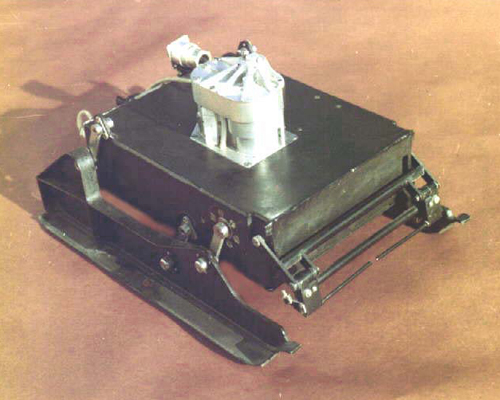
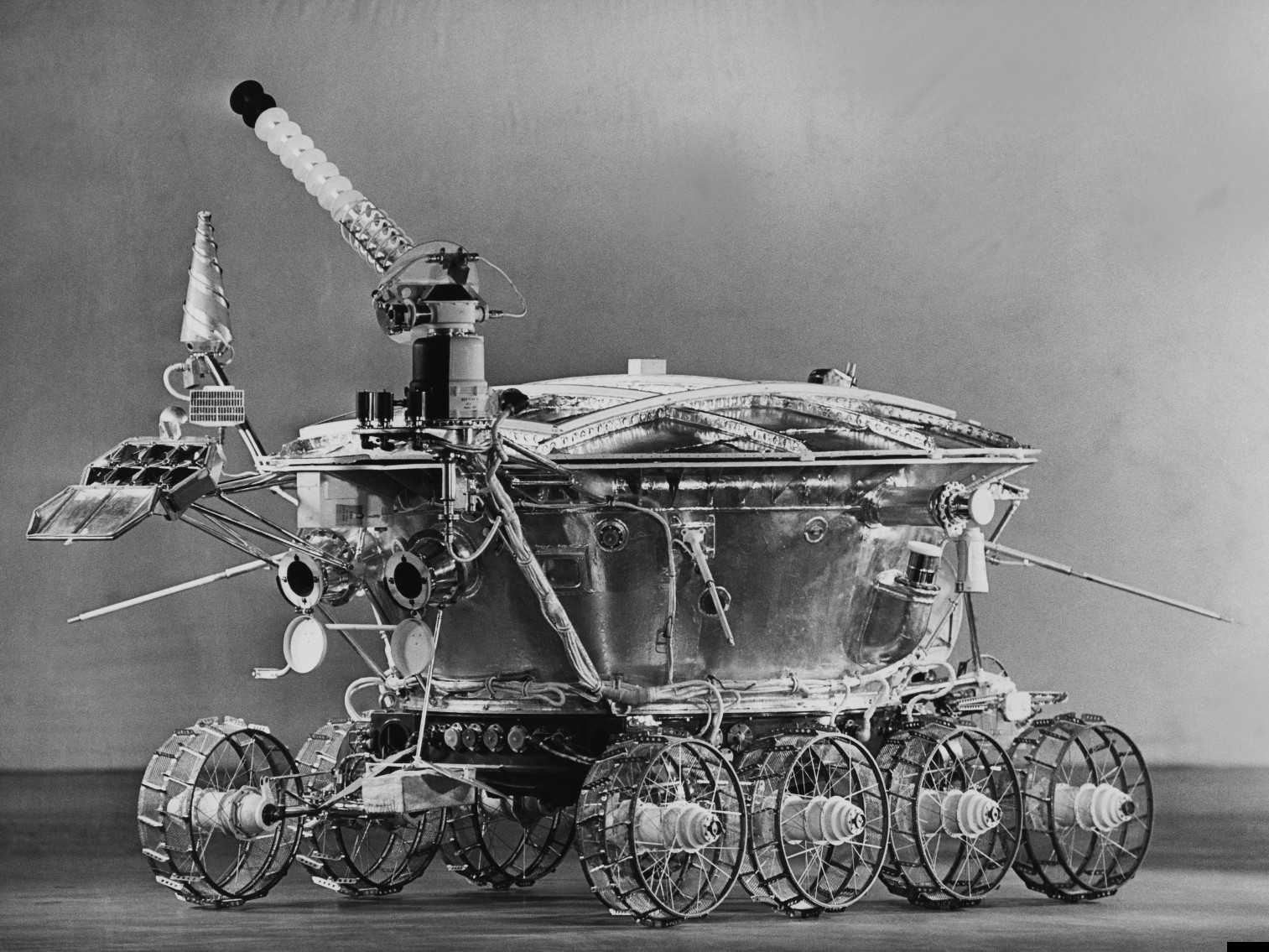
A PrOP-M földi makettje. A jármű testét a középen lévő doboz alkotta, két oldalt a sítalpak, elöl pedig az érzékelő ütköző látható.
A test tetején a Marsz űrszonda leszállóegységéhez kapcsolódó kábelek bekötési pontját helyezték el. A jármű mozgását jól mutatja az alábbi
két videó:
From Moonrover to Marsrover. Part 1 of 2,
Edge Render, Prop-M Mars Rover
Forrás: Наш путь через тернии к звездам. История былого величия и мечты о будущем…

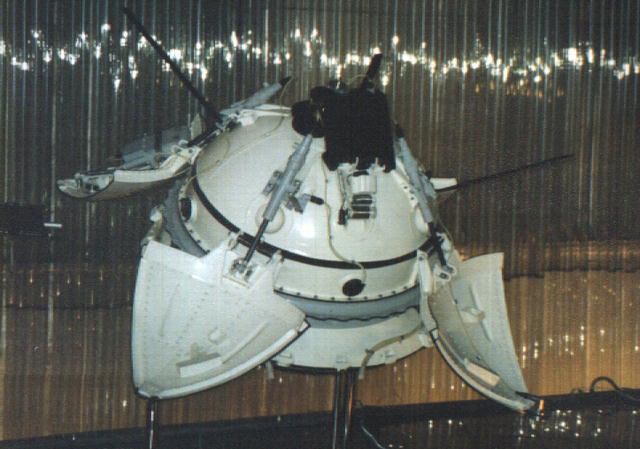
A Marsz 2 űrszonda. A leszállóegység és a rover a kúpos hő pajzs alatt kapott helyet az űrszonda tetején.
Forrás: СССР запустил на красную планету космическую станцию Марс-2
A Marsz 2 és 3 űrszondák leszállóegységeinek földi makettje. A fekete doboz az egység tetején a PrOP-M rover.
Forrás: Первый в мире марсоход ПРОР-М
A PrOP-M 215 mm hosszú, 160 mm széles, 60 mm magas és körülbelül 4,5 kg súlyú volt, szerkezetileg egy dobozszerű testből és ehhez kétoldalt csatlakozó két darab sítalpból állt. Mozgása során a sítalpak a csatlakozás pontok körül a gőzmozdonyok hajtókarjaihoz hasonlóan előre-hátra alternáló mozgást végeztek, mindig a talajjal párhuzamosan állva. Amint a sítalpak elérték a talajt kicsivel a rover teste előtt, felemelték a testet, majd letették a sítalpakhoz képest pár centiméterrel előrébb, majd a test felett átforogtak megint a test elé. A sítalpak segítségével a rover körülbelül 1 m/perc sebességre volt képes. A rover egyenesen mozgott egészen addig, amíg akadályba nem ütközött. Ha a jármű elején elhelyezett érzékelő ütköző hozzáért valamilyen sziklához vagy egyéb akadályhoz, akkor a jármű hátramenetbe kapcsolt, hátrált kicsit és csak az egyik oldali sítalp mozgatásával elfordult valamelyik irányba. Ezután ezt az irányt tartva újra egyenesen indult el. Egészen addig folytatta ezt a fajta manőverezést, amíg ki nem kerülte az akadályt. Két műszerrel volt felszerelve: egy penetrométerrel és egy gammasugárzás mérővel. A rovereket a folyamatban lévő Marsz-program űrszondáival tervezték eljuttatni a marsi felszínig. Leszállás után egy robot kar helyezte volna a felszínre a rovert, amelyet egy 15 méter hosszúságú kábel kötött össze az űrszonda leszálló egységével. A kábel hatósugarában a rover eltávolodott a leszálló egységtől és közben 1,5 méterenként méréseket végzett volna. A jármű megtervezésére nem volt sok idő, mert a következő megfelelő indítási ablak 1971-ben kínálkozott. A Föld és Mars nagyjából 26 havonta áll olyan elhelyezkedésben egymáshoz képest, amikor a repülés a Marsig a Hohmann transzfer pályán a lehető legkevesebb energia felhasználásával lehetséges. 1971-ben két űrszonda indítását is tervezték a vörös bolygó felé; a Marsz 2-t és a Marsz 3-t. A két űrszonda felépítése egymással tökéletesen megegyezett, egy-egy keringőegységből és leszállóegységből álltak és mindkettő vitt magával egy-egy PrOP-M rovert. Az űrszondák 4,56 t tömegűek, mintegy 5 m hosszúak és 2,4 m átmérőjűek voltak. A hengeres alakú keringőegység testének nagy részét a hajtóanyag és oxidálószer tartályai, valamint a pályakorrekciós és fékező hajtómű alkotta. Továbbá itt helyezték el a vezérlő rendszert, a navigációs rendszert és érzékelőit és a tudományos műszerek egy részét. A 2,4 m átmérőjű test külső felületéhez csatlakozott két darab kinyitható napelem szárny, a hőszabályzó rendszer radiátorai és egy kommunikációs parabolaantenna. A következő műszerek kaptak helyet a keringőegységben: egy infravörös sugárzásmérő, egy rádióteleszkóp, egy infravörös fotóméter, egy IV-2 nevű interferencia polarizált fotóméter, egy fényeloszlás mérő fotométer, egy négy csatornás UV fotométer, két darab kamera egyenként 480 kép készítéséhez elegendő filmmel, egy magnetométer, egy ion csapda, egy RIEP-2801 nevű töltött részecske vizsgáló spektrométer, egy kozmikus sugárzás mérő és egy rádióadó a légkör szerkezetének felderítéséhez. A keringőegység tetejéhez csatlakozott a leválasztható hő pajzzsal ellátott tojás alakú leszállóegység. A leszállóegység felső részén négy darab kinyitható panel volt, a panelek alatt az egység tetején helyezkedett el a rover a talajra helyező mechanizmussal együtt. Az egységet a hő pajzs védte meg a légkörbe történő belépésnél fellépő súrlódás okozta hőtől, majd levált és a leszállóegység a saját ejtőernyőjének segítségével érte el a talajt. A hermetikus műszertartályában helyezték el az irányító-, telemetriai-, kommunikációs-, energiaellátó rendszereket és a felszínt vizsgáló berendezéseket. A leszállóegység műszerei az alábbiak voltak: egy gamma-sugár spektrométer, egy röntgen spektrométer, egy hőmérő, egy anemométer (légsebességmérő), egy nyomásmérő, két darab kamera és egy tömeg spektrométer.
A Marsz 2 1971. május 19-én (világidő szerint) 16:22:49-kor indult a Bajkonuri űrrepülőtérről egy Proton K hordozórakétával. Május 28-án 15:26:30-kor a Marsz 3 is útnak indult. A Marsz 2 pályáját július 17-én, november 20-án és 27-én korrigálták. November 27-én levált a leszállóegység és megkezdte a leszállást. Mielőtt azonban a belépett volna a légkörbe még egy korrekciós manőver volt a vezérlésbe programozva, amely során a leszállóegységet felpörgetik egy megadott fordulatszámra és megfelelő szögbe állítják légkörbe lépéshez. Az előzetes pályakorrekció azonban olyan tökéletesre sikeredett, hogy erre nem lett volna szükség. A manőver túl meredek pályára állította a leszállóegységet a légkörbe lépéshez, az ejtőernyő nem nyílt ki és a Marsz 2 leszállóegysége a PrOP-M roverrel együtt a Mars felszínébe csapódott. A társánál szerencsésebb Marsz 3 repülése során szintén két pályakorrekciót hajtott végre; az elsőt június 8-án, a másodikat pedig december 2-án. Szintén december 2-án 9:14-kor levált a leszállóegység és 15 perccel később egy utolsó pályakorrekcióval beirányozta magát a légkörön átvezető folyosóba. 13:44-kor 6 km/s-os sebességgel lépett be a légkörbe. Amikor a leszállóegység sebessége hangsebesség körüli értékre csökkent kinyílt a fékező, majd azután a főejtőernyő, leoldott a hő pajzs és kinyílt a magasságmérő radarantennája. 20 és 30 méter közötti magasságban levált az főejtőernyő, bekapcsolódott a rakétás fékezőrendszer és a leszállóegység 13:47-kor talajt ért a déli szélesség 45 °, nyugati hosszúság 160 ° koordinátájú pontban a Terra Sirenum nevű területen, ezzel a Marsz 3 lett az első űrszonda, amely sikeres landolást hajtott végre a Mars felszínén. Az egység vezérműve 90 másodperc alatt kinyitotta a paneleket és üzembe helyezte a berendezéseket. 13:50:35-kor megindult az első panorámakép közvetítés a felszínről, ami azonban 20 másodperc múlva megszakadt. Nagy valószínűséggel egy erős homokvihar csapott le a területre, amelyben létrejövő kisülések rövidre zárták a leszállóegység elektromos hálózatát és a szonda gyakorlatilag meghalt. Mindez még a PrOP-M rover felszínre helyezése előtt történt, így a szondával együtt a rover is megszűnt működni. Az űrszondák kudarcai miatt a PrOP-M roverek nem tudták megmutatni képességeiket a Marson és bár velük sikerült megoldani a kommunikációs és súlyproblémákat, ennek ellenére a Lunohod-hoz képest inkább visszalépésnek tűnt az alkalmazásuk. A Marsz 2 és 3 kudarca után 1973-ban indultak újabb szovjet űrszondák a Mars felé, a Marsz 6 és 7 leszállóegységei azonban nem vittek magukkal rovereket. Mivel a Marsz 6 és 7 sem tudott sikeres leszállást végrehajtani a felszínen a szovjet űrprogram vezetői úgy döntöttek, hogy nem indítanak újabb űrszondákat a Mars felé.

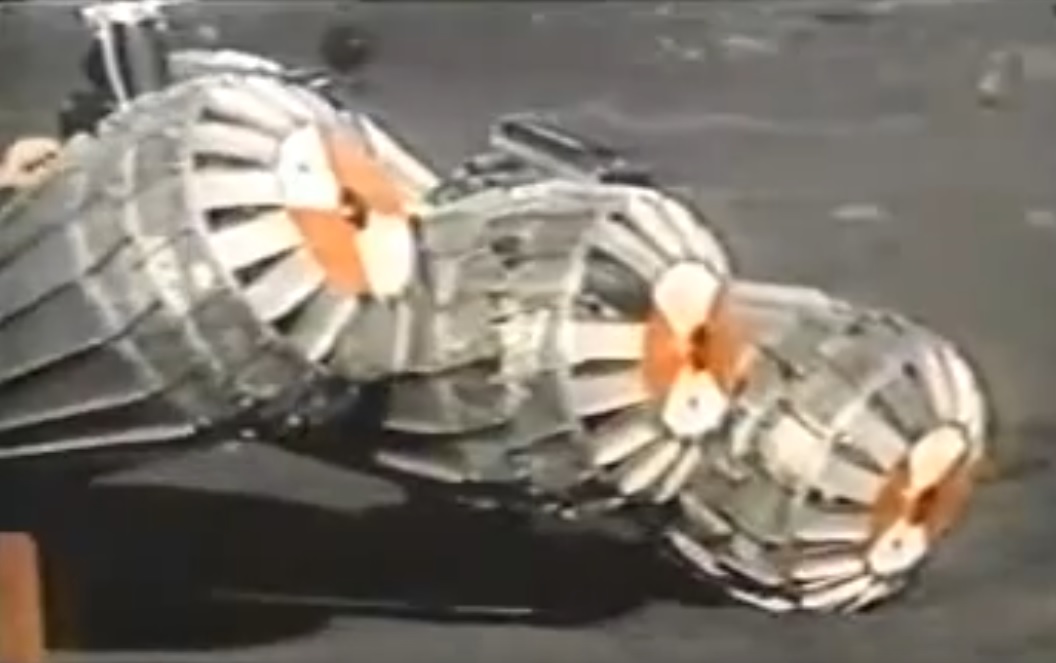
Az 1978-as EOSA nevű prototípus mind a hat kereke egymástól függetlenül a járműhez képest előre és hátra, fel és lefelé is el tudott
mozdulni, így szabadon lehetett a jármű has magasságát változtatni, meredek terepen is vízszintes maradhatott a járműtest és
emelkedőkön képes volt a kerekek előre hátra mozgatásával mászni is.
Forrás: Наш путь через тернии к звездам. История былого величия и мечты о будущем…
Ennek ellenére a VNII-100 tervezőirodában továbbra is fejlesztettek új rover prototípusokat. A Lunohod 1 alváza alapján létrehozták a jármű továbbfejlesztett kísérleti példányát. 1976-ban megalkották a HM-PK nevű prototípust, aminek mind a hat kereke 45°-os szögben kitéríthető volt jobbra és balra is, így rák módjára oldalazó mozgást is tudott végezni és a meredek emelkedőkön is könnyedén boldogult. Haladási sebessége két fokozatban 0,51 vagy 5,1 km/h lehetett. 1978-ban megépült az EOSA nevű prototípus, amelynek mind a hat kereke egymástól függetlenül a járműhez képest előre és hátra, fel és lefelé is el tudott mozdulni, így szabadon lehetett a jármű has magasságát változtatni, meredek terepen is vízszintes maradhatott a járműtest és emelkedőkön képes volt a kerekek előre hátra mozgatásával mászni is. A jármű súlya 480 kg volt, két fokozatban 0,3 és 0,02 km/h (séta üzemmód) sebességre volt képes. Miközben a VNII-100 tervezőiroda megtervezte, legyártotta és tesztelte az ötletesebbnél ötletesebb prototípusait a sorozatos marsi kudarcok miatt a szovjet űrkutatás az 1970-es évek második felében egyre inkább a Vénusz felé fordult, ahol sokkal nehezebb körülmények között, de egyre nagyobb sikereket értek el. A Venyera-program űrszondái egyre mélyebbre hatoltak a bolygó légkörében, majd sikeresen landoltak a felszínen és egyre hosszabb ideig tartó működésük során értékes adatokat közvetítettek a Földre. A sikereik miatt a tudósokban és mérnökökben felvetődött egy, a Vénuszra küldendő rover ötlete. A Vénusz azonban sokkal barátságtalanabb hely a Marsnál. A felszínen átlagosan 465 °C van, a nyomás értéke eléri a 9,2 MPa-t, azaz a földi érték 92-szeresét. Légköre 96,5 %-ban széndioxidból, 3,5 %-ban nitrogénből, kénből, klórból és nemesgázokból áll. A légkörben lévő felhők főleg kénsavcseppekből állnak, emiatt már a felszínre való lejutás is nagyon nehéz a légkör korrodáló hatása miatt. A sűrű felhőtakaró miatt igen csekély napfény jut le a felszínre. A légkörben fújó szelek sebessége nagyon csekély, de a sűrű légkör mégis úgy viselkedik hatásukra mintha folyadék lenne. A bolygón legtovább működő űrszonda a Venyera 13 leszállóegysége volt, amely 127 percig bírta a felszíni viszonyokat. A mérnökök úgy próbálták növelni a rover élettartamát, hogy egy extrém nehéz terepen is közlekedni tudó konstrukciót terveztek, amely a legrövidebb út alatt képes elérni az egyik pontból a másikba.

A HM-VD 2 prototípus. Ezen a dokumentumfilmből származó képkockán a jármű oldalról látható, a fehér-piros és ezüst szürke színű
részek a hat darab kúpos kerék, három tengelyét két kinyujtható/összehúzható elem kapcsolta össze, középen pedig egy állványon az energiát
biztosító szélkerék látható.
Forrás: From Moonrover to Marsrover. Part 2 of 2. Venus-rover

A jármű középső tengelyét a csuklós összekötök segítségével fel tudta emelni.
Forrás: From Moonrover to Marsrover. Part 2 of 2. Venus-rover
1986-ra elkészült a HM-VD 2 névre keresztelt prototípus jármű, amely nem mindennapi felépítéssel rendelkezett. Hat darab kúpos kerekét egy csuklós alváz kötötte össze. Minden kerék egyedileg volt meghajtva és rugalmas módon kapcsolódtak az alvázhoz, így oldalra, felfelé és lefelé is szabadon tudtak mozogni a rover testéhez képest. A kerekek teljes felülete a talajhoz tudott érni, így nagyobb erőt tudtak átvinni. A jármű fordulásához a kereket egymáshoz képest eltérő sebességgel forgatták. Ezzel a módszerrel a jármű képes volt egyhelyben is megfordulni. A csuklós alváz segítségével a középső kerékpárját fel tudta emelni, emellett a kerékpárokat összekötő szakaszok hossza változtatható volt, a rover maga után tudta húzni az egyes kerékpárokat, így nemcsak gurulni, hanem mászni is tudott. A kerékpárok közötti egyes alváz részek a hossztengelyükkel párhuzamosan el is tudtak forogni egymáshoz képest. A különleges futóműnek köszönhetően a HM-VD 2 akár 44°-os lejtőn is fel tudott menni. Ahogy a kerekek csúszni kezdtek, egyre nagyobb felületük ért a talajhoz és egy kis dombot hoztak létre maguk mögött, ami segítette a további haladást. Ezzel a futóművel a rover a legnehezebb terepen is sikeresen elboldogult. Menet közben a jármű folyamatosan figyelte a kerekek dőlés szögét. Ha valamelyik érték meghaladta a megengedettet, akkor a jármű megállt, hátrahajtott, megváltoztatta kissé az irányát és újra elindult előrefelé. A felszínre jutó kevés napfény miatt a napelemek használatát erőforrásként gyorsan elvetették, helyettük egy szélturbinával szerelték fel a rovert, amely egy oszlopon elhelyezett rotorból és a hozzá kapcsolt generátorból állt. A sűrű légkör miatt ez a megoldás is elegendő energiával látta el a járművet. Az akkumulátorok speciális elektrolitja a földön szilárd halmazállapotú volt, de a vénuszi körülmények között folyékonnyá vált. Emellett a járművet olyan elektronikával látták el, amely képes elviselni a magas hőmérsékletet. A HM-VD 2-t sikerrel tesztelték a vénuszi felszínhez hasonló, zord, vulkánokkal teli kamcsatkai tájon. Az 1985 után kibontakozó Peresztrojka miatt azonban egyre kevesebb támogatást kapott a szovjet űrkutatás és a Mir űrállomás építése, valamint a Burán űrrepülőgép fejlesztése mellett nem jutott pénz arra, hogy a HM-VD 2 eljusson a Vénuszra.
A dokumentumfilm másik kockáján a kerekek egymáshoz képesti fel és lefelé történő elmozdulása látható.
Forrás: From Moonrover to Marsrover. Part 2 of 2. Venus-rover
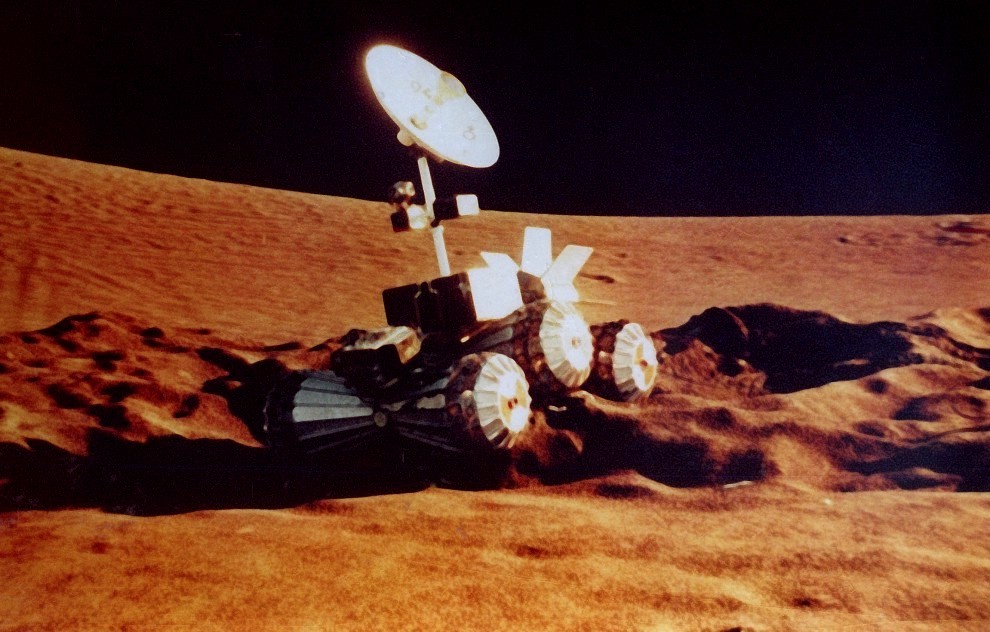
A HM-VD 2 alapján egy marsrovert is terveztek, amelynek szerkezete nagyjából megegyezett a HM-VD 2-vel.
Az illusztráción ez a jármű látható szélkerék helyett egy kommunikációs antennával az állványán.
Forrás: Наш путь через тернии к звездам. История былого величия и мечты о будущем…
1988-ban még egy utolsó kísérlet történt arra, hogy egy szovjet rovert juttassanak el egy másik égitest felszínére, a jármű pedig minden eddiginél extrémebb kialakítást kapott. 1985-ben a nemzetközi kooperációban épített Vega 1 és 2 űrszondák sikere felvillanyozta a szovjet űrkutatás vezetőit és egy újabb nemzetközi részvétellel tervezett nagyszabású misszióval vissza szerettek volna térni a Marshoz, amelyet 1974 óta nem látogatott meg szovjet űrszonda. Az indítani kívánt két új űreszköz, a Fobos 1 és 2 feladata az volt, hogy bolygó körüli pályáról vizsgálják a Marsot, valamint hogy megközelítsék annak egyik holdját, a Phobos-t és egy leszállóegységet juttassanak annak felszínére. A programban részt vett Ausztria, Bulgária, Csehszlovákia, Finnország, Franciaország, Írország, Lengyelország, Magyarország, mindkét Németország (NSZK és NDK), Svájc, Svédország és az ESA, azaz az európai űrügynökség is. Az új univerzális űrszonda egy tórusz alakú műszaki egységből és az azon elhelyezett hengeres alakú tudományos műszereket tartalmazó tároló részből állt. A műszaki egység alján kapott helyet a pályakorrekciós hajtómű, amely a Marsnál történő fékezés után levált. Két darab kinyitható napelem szárny látta el az űrszondát energiával. A Fobos 1 egy olyan geológiai és klímavizsgáló állomást vitt magával, amely a megközelítés után horgonyokkal rögzítette volna magát a Phobos felszínére, a Fobos 2-vel pedig egy PrOP-FP nevű ugráló rovert terveztek eljuttatni a hold felszínére. A PrOP-FP esetében egy rugó biztosította az ugrás erejét. A rugót hátrahúzták, majd elengedték a felszín felé, az pedig nekiütődve a talajnak járművet ballisztikus pályára állította. Az ugrás után, amint a rover stabilan megállapodott, egy pozicionáló szerkezet a következő ugráshoz megfelelő irányba állította a járművet. A 43 kilogrammos gömb alakú szerkezet 10 és 40 méter közötti ugrásokat tudott volna megtenni a Phobos-on lévő gyenge gravitációban és minden egyes ugrás után méréseket végzett volna a felszínen. A szerkezet élettartamát négy órára tervezték és a következő műszereket vitte magával: egy penetrométert, egy gyorsulásmérőt, egy röntgen spektrofotométert, egy magnetométert, egy a sziklák ferromágneses tulajdonságát mérő kappamétert, egy gravimétert, egy hőmérséklet szenzort, egy a felszín elektromos ellenállását mérő berendezést és egy dőlésszög mérő műszert.
A Vega szondák sikereihez képest azonban az utolsó szovjet bolygókutató programot egyáltalán nem kísérte szerencse. A Bajkonuri Űrközpontból 1988. július 7-én 17:38:04-kor startoló Fobos 1 egy útközben fellépő program hiba miatt nem fordult a Nap felé, ezért az akkumulátorai hamarosan kimerültek és gyakorlatilag űrszemétként érte el a Mars környezetét. A Fobos 2 sem volt sokkal szerencsésebb, már az indítás előtt tudtak arról, hogy a két rádió-adóvevő közül az egyik meghibásodott és a BUK nevű vezérlő számítógép nem működik megfelelően egy hibás kondenzátor miatt. Ennek ellenére a Fobos 2 1988. július 12-én 17:01:43-kor elindult a Bajkonuri Űrközpont 200-as számú indítóállásából egy Proton K hordozórakéta orrán. Az űrszonda két pályamódosítási manővert hajtott végre július 21-én és 1989. január 23-án. A Fobos 2 1989. január 29-én érte el a Marsot és sikeresen 819 × 81 kilométer magasságú pályára állt körülötte. Nem sokkal a pályára állás előtt az irányítók felfedeztek egy komoly hibát a repülésirányító rendszeren belül, a három darab processzor közül az egyik teljesen meghibásodott, míg egy másik hibákat mutatott a működése során. A normális működéshez legalább két hibátlan processzorra lett volna szükség. A hibák ellenére február 12-én megkezdték a Phobos-hoz való közeledés manővereit, a legnagyobb közelséget április 4. - 5. körül tervezték elérni és ekkor indították volna a PrOP-FP rovert is. Március 27-én az ütemezett kommunikációs időszakban 15:58-kor megszakadt a kapcsolat az űrszondával és később is csak egy gyenge jel érkezett, amiből arra következtettek az irányító központ munkatársai, hogy a szonda elvesztette az addigi stabil irányítását és pörög a tengelye körül. Az adatokból úgy tűnt a Fobos 2 elvesztette energiaellátását, a pörgés miatt fokozatosan lehűlt, a belső berendezései pedig megszűntek működni a hideg hatására. A kommunikáció visszaállítására történő későbbi próbálkozások sem jártak sikerrel, ezért a programot április 14-én lezárták. A pontos ok mindmáig ismeretlen, de valószínűsíthető, hogy a vezérlő számítógépben korábban tapasztalt hibák vezettek az űrszonda elvesztéséhez. 1991-ben az évek óta gazdasági gondokkal küszködő Szovjetunió a darabjaira hullott szét és az utódállamként létrejövő Oroszország mindössze a Mir űrállomás fenntartásához rendelkezett elegendő pénzügyi forrásokkal, így a bolygókutatás és vele együtt a bolygókutató roverek programjai is a süllyesztőben végezték.
A kissé elmosodott képen a PrOP-FP modellje látható a földi tesztelés során.
Forrás: From Moonrover to Marsrover. Part 1 of 2
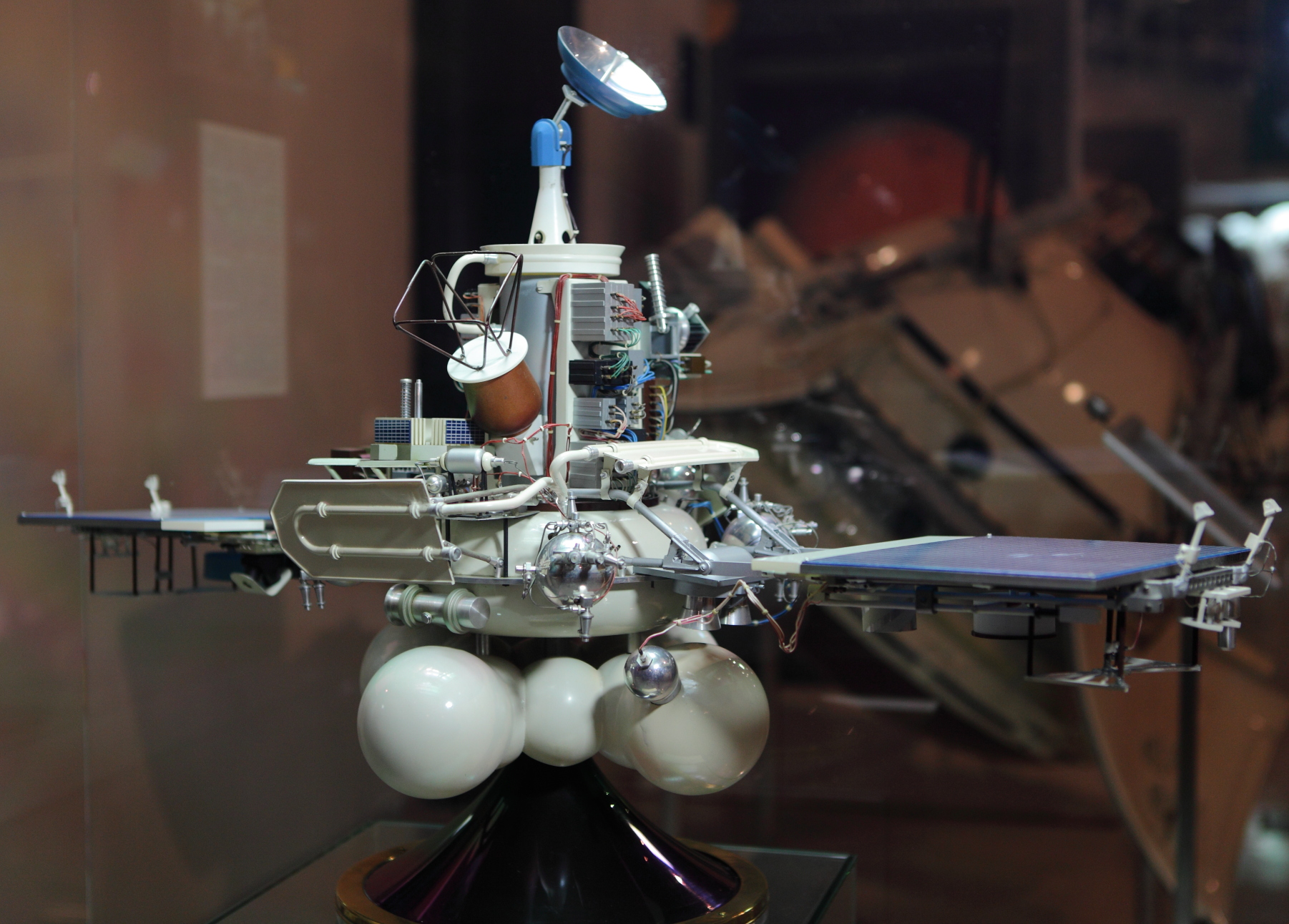
A Fobosz 2 makettje az orosz Музей Космонавтики űrrepülési múzeum kiállításáról. A jármű közepén lévő barna színű gömb a PrOP-FP rover.
A roverhez tartozott egy négyágú lábazatt, ami a felszínre érés után levált.
Forrás: Музей Космонавтики/Wikipedia
.jpg){kind=link}

A Mars Phobos nevű holdja, ahova a PrOP-FP nem juthatott el.
Forrás: Phobos 2 Images of Mars and Phobos
Az óceán túloldalán a nagy ellenfél összeomlásával éppen egy időben jelentetett be a NASA új űrprogramját Discovery néven, amelyben az űrkutatási hivatal történetében először helyet kapott egy automata marsjáró is. Korábban már Prospector és a Surveyor programokban is felmerült a távirányítású járművek Holdra juttatása, de az Apollo program árnyékában nem volt esélyük a fennmaradásra. Annak ellenére, hogy az automata járművek küldetései sokkal olcsóbbnak ígérkeztek, a NASA számára 1972-ig az Apollo program volt a legfontosabb. Az űrhivatal egyszerűen nem tehette meg azt, hogy az évek során felépített eszközparkot kihasználatlanul kidobja a kukába. Továbbá mivel a Szovjetunió propagandája éppen azt harsogta, hogy az űr olcsón és biztonságosan felderíthető a Lunohod-okhoz hasonló járművekkel, a NASA hatalmas öngólt lött volna, ha szintén alkalmazza őket. Az Apollo program befejezése után új korszak köszöntött be és a NASA-nak az előző időszakhoz képest töredéke összegből kellett gazdálkodnia, amiből az űrrepülőgépek fejlesztése mellett csak néhány nagyobb űrszonda projektre jutott pénz. 1972 és 1979 között a NASA négy szondát indított a külső bolygók felfedezésére (Pioneer 10 és 11, Voyager 1 és 2) két űrszondát indított a Marshoz (Viking 1 és 2) és három űrszondát indított a Vénusz felé (Mariner 10, Pioneer Venus 1 és 2). 1979 és 1988 között pedig egyetlen bolygókutató űrszondát sem bocsátott fel az Egyesült Államok. A nyolcvanas évek végén azonban megváltoztak a prioritások, a NASA a 2000-es években lényegesen több űrszonda missziót szeretet volna végrehajtani. Az 1990-ben bejelentett Discovery program mintegy felkészülésként szolgált erre az időszakra, olyan önálló missziók kaptak benne helyet, amelyek a lehető legkevesebb költségből, a lehető legrövidebb idő alatt tudnak tudományos eredményeket felmutatni. A program sorrendjében a második helyen a Mars Pathfinder misszió állt, amelynek céljaként egy leszállóegységet és egy kisméretű rovert terveztek eljuttatni a Mars felszínére. A Discovery program céljainak megfelelően a Pathfinder kifejlesztésére legfeljebb három év és maximum 150 millió dollár állt rendelkezésre. A teljes küldetés megvalósításának költsége nem lehetett több mint 280 millió dollár, ami a korábban Marson landolt Viking űrszondák költségeinek 1/15-e volt. A Pathfinder misszió emellett nagyon fontos szerepet töltött be a jövőbeni marsi küldetések szempontjából, mint technológiai demonstrátor. A Viking űrszondák leszállóegységeitől eltérő landolási módot terveztek végrehajtani és vizsgálni szerették volna a kisméretű marsjáró mobilitását és hasznosságát a marsi felszínen.
A leszállás helyéül a marsi egyenlítő közelében található Ares Vallis nevű területet jelölték ki. A régió nagy valószínűség szerint egy ártér maradványa, amelyet eonokkal korábban elöntött egy hatalmas méretű áradás. Az Ares Vallis megfelelt a leszállóhellyel szemben támasztott kritériumoknak: lankás lejtőkkel borított terület, ahol alacsony a szállópor koncentráció, így mérsékelt az esélye a porviharok kialakulásának. A tervezett landolás idején - 1997 júliusa - jó megvilágítási viszonyokkal rendelkezett. Emellett a kiválasztási csoport tagjai úgy vélték, hogy a felszíne tele lehet különböző rétegekből származó kövekkel, amelyeket az áradás lemosott a közeli felföldekről. Az Ares Vallis mellett több más hasonló terület is felmerült, ahol az ősi áradások a Chryse Planitia medence irányába szállítottak anyagot. Mindegyik területet áttekintették a Viking űrszondák keringőegységei által készített fényképeken, de végül a több mint hatvanfős, amerikai és európai tudósok bevonásával létrejött kiválasztó csoport az Ares Vallis mellett döntött. Az űrszonda és a rover kifejlesztését és megépítését a kaliforniai Pasadena-ban lévő JPL (Jet Propulsion Laboratory – Sugárhajtás Kutatóintézet) végezte Tony Spear projekt menedzser vezetésével. Addigra JPL már nagy tapasztalatot szerzett az űrszondák és leszállóegységek tervezésében, de a rover újdonságnak számított az intézet számára. Az űrszondát a Pathfinder nevű leszállóegység, a rover, egy hő pajzzsal ellátott áramvonalas burkolat és egy utazó fokozatnak nevezett műszaki egység alkotta. A JPL olyan leszállóegységet tervezett, ami összecsukott állapotban leginkább egy tetraéderre emlékeztetett. Alapját egy hatszög alakú platform alkotta, amelyhez 120°-onként három darab trapéz alakú lenyitható panel kapcsolódott. A hatszög platformon helyezkedett el az Instrument Electronics Assemblies nevű műszerdoboz, amely tartalmazta az elektronikát és a vezérlő számítógépet, valamint az energiát biztosító akkumulátorokat. A műszerdoboz tetején helyezték el a kommunikációs antennákat. A lenyitható panelek belső felületét napelemek borították, illetve itt helyezték el a rovert és annak kinyitható rámpáit is. A leszállóegység műszerei közül az IMP - Imager for Mars Pathfinder sztereókamera rendszer egy forgatható állványon kapott helyet a műszerdoboz tetején. A kamerarendszer mindkét egységét különböző színszűrőkkel látták el. A sztereókamera a környezet fotózásán és tudományos vizsgálatokon kívül a rover navigációját is nagymértékben segítette. Az ASI/MET (Atmospheric Structure Instrument and Meteorology Package) a landolás során mérte a marsi légkör sűrűségét, hőmérsékletét és nyomását 120 kilométer magasságtól egészen a felszínig. Rendelkezett gyorsulásmérő szenzorokkal is, amik a leszállás során fellépő gyorsulás értékeket mérték, valamint szélsebesség szenzorral. A szenzorok egy része a műszerdoboz mellett kapott helyet, a szélsebesség mérőt és a hőmérséklet szenzorokat pedig az egyik kinyitható panelon helyezték el. A műszeregység a tervek szerint a felszínen is folytatja majd a légköri méréseket. A leszállóegységen helyet kaptak továbbá olyan mágneses csapdák, amik a marsi por mágnese tulajdonságait vizsgálták. A lenyitható panelek belső felületét összesen 2,8 négyzetméteres területen napelemek borították, amelyek 160 W teljesítménnyel üzemeltek a Nap delelő időszakában és összesen 1200 Wh energiát biztosítottak egy marsi nap folyamán. A földi irányító központtal való kapcsolattartás egy nagynyereségű antennán keresztül bonyolódott, ami 6 kbit/s adattovábbítási sebességgel rendelkezett. Az adatokat a Földön a Deep Space Network hálózat kaliforniai Goldstone-ban lévő 70 m átmérőjű parabolaantennája vette. A földi irányítás a Pathfinder-en keresztül kommunikált a roverrel egy UHF antenna segítségével. A leszállóegységet egy R6000 típusú VME busszal ellátott vezérlő számítógéppel szerelték föl, amely 22 millió parancs végrehajtására volt képes másodpercenként és 128 megabyte memóriával rendelkezett. A Pathfinder teljes tömege a roverrel együtt 370 kg, tervezett élettartama pedig 30 nap volt.
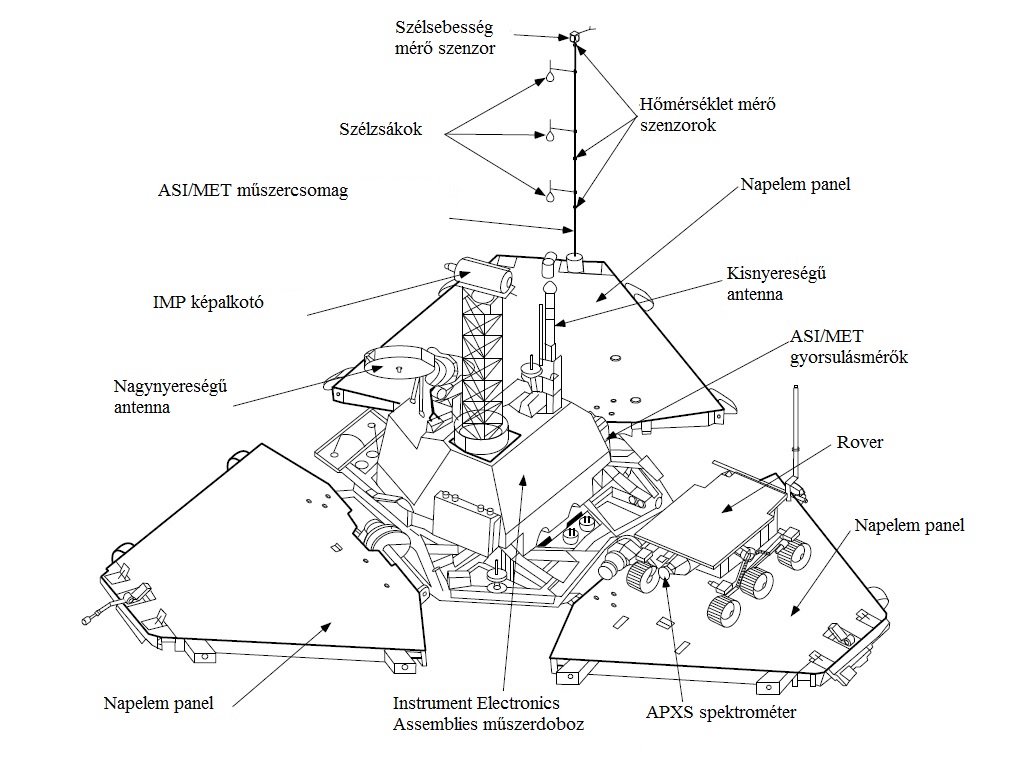
A Pathfinder űrszonda leszállóegységének részei.
Forrás: NASA Facts Mars Pathfinder
A rover feladatául a leszállóegység közvetlen környezetében található felszíni talaj, kövek és sziklák felderítését és vizsgálatát szánták, hosszabb utak megtételére nem volt alkalmas. Mindemellett talajmechanikai, anyagtapadási és kerékkopási vizsgálatokat kellett végrehajtania, illetve fényképeket készítenie a Pathfinder-ről jelezve annak állapotát. A rover tervezésekor az amerikai szakembereknek is szembe kellett nézniük a rádiójelek nagyidejű késésével, a tömegkorlátozással és az egyenetlen terepen is haladni képes futómű kifejlesztésének problémájával. 11 percbe telik, amíg a Földről induló rádiójelek elérik a Marsot és ugyanennyi idő, amíg a válasz megérkezik, tehát a JPL mérnökei is hamar rájöttek arra, hogy a távirányítás biztonságos megvalósítása lehetetlen. Éppen ezért a rovernek autonóm irányítórendszerrel kellet rendelkeznie. Az irányítást az RCW (Rover Controll Workstation) munkaállomáson keresztül végezte. A munkaállomás segítségével határozták meg a rover haladási irányát és a célpontját, de az út során a rover autonóm módon, önállóan kerülte ki az esetleges akadályokat. A folyamatot az is bonyolította, hogy az irányító központ számára naponta csak egy lehetősége volt, hogy parancsokat küldjön a rover felé és adatokat fogadjon tőle. Az irányító központban kialakított munkaállomáson dolgozott a vezető és a feladat szervező. A Rover Uplink Opperation nevű csapat jelölte ki a visszaérkezett fényképek alapján az érdekesnek ígérkező sziklákat, amiket a roverrel szeretnének majd megvizsgálni. Az RCW egy több monitorból álló kijelzőn jelenítette meg a rover és a leszállóegység kamerái által készített fényképek és sztereo képek alapján a számítógép által generált marsi környezet modelljét. Két vezető teljesített szolgálatot, Brian K. Cooper volt a főirányító és Jack Morrison a tartalékja. A rover vezető speciális 3D szemüveget használt, amely a monitoron látható képnek mélységet adott, így hozva létre a marsi környezet térhatású látványát. Emellett egy speciális, hat szabadságfokú eszközzel mozgatta a kurzormutatót a képernyőn. Ez a kurzor a rover valós méretét és valós idejű elhelyezkedését modellezte a virtuális környezetben. Emellett az RCW rendelkezett egy szabadon mozgó virtuális kamerával, amely a felszín számítógép által generált modelljében szabadon mozoghatott, így segítséget tudott nyújtani a terep és a veszélyek felméréséhez. A munkamegosztás szerint az Uplink csapat meghatározta a rover számára a következő célpontot, az RCW munkatársai pedig meghatározták azt, hogy a célpont megközelíthető-e biztonságosan, ha igen akkor pedig melyik a legmegfelelőbb útvonal és ehhez milyen parancs listát kell küldeni a rovernek. Ez a parancslista a rover állal elvégzendő mozgások mellett a műszerek használatára és a napi megfelelő belső működés biztosítására vonatkozó utasításokat is tartalmazott. A parancs lista angol nyelvű utasításokból állt és általában 200 utasításnyi hosszú volt. Az RCW ezt bináris kóddá alakította át és ez lett elküldve a rover számára. Az elküldés előtt az RCW a bináris kódot ismét visszaalakította utasításokká, így ellenőrizve a folyamat hibamentességét. Az RCW hardver része két tökéletesen azonos számítógép állomásból és a hozzájuk kapcsolódó input/output készülékekből állt. Mindegyik számítógép 1 GB RAM-mal, 18 Gbyte-os háttértárral és 64 megabyte textura RAM-mal rendelkezett a gyors feltérképezéshez. A virtuális környezet a Silicon Graphics Onyx2 Infinite Reality Engine videokártyával lett megjelenítve Open Inventor and OpenGL könyvtárak felhasználásával. A bemenetet egy billentyűzet, egy egér és a hat szabadságfokú kurzor, míg kimenetet a 24 darab összekapcsolt monitor és a 3D szemüveg alkotta. A kurzort a Spacetec IMC Corporation, a szemüveget StereoGraphics Corp készítette.
Az irányító szoftver 40 000 sornyi C++ nyelven írt kódból és további 40 000 sornyi X Window Motif környezetben írt kódból állt. A rover vezető GUI kezelőfelületen keresztül a hat szabadságfokú kurzorral tudta mozgatni a járművet, illetve lehelyezhetett egy navigációs pontot, amit a rover autonóm módon ért el. A rendszer alapját a Go to Waypoint nevű parancs jelentette, amit a rover vezetője adott ki. A vezető első lépésként meghatározta a rover helyzetének és a célpont helyzetének x és y koordinátáit. A koordináta rendszer a Mars felszínéhez volt rögzítve, felvételére az első napon került sor, amikor a Pathfinder először észlelte a marsi égen felkelő Napot és ez alapján meghatározta a marsi északi irányt. Az ezután kiadott Go to Waypoint parancs hatására a rover nagyjából egyenes vonalban haladt a célkoordináták felé. A megtett távolságot a motorok által megtett körülfordulásokból és a motor és kerék között lévő összesen 2000:1 arányú módosításból számolták ki. A jármű elfordulásának mértékét pedig egy giroszkóp határozta meg. A megtett út alapján kerültek kiszámításra a jármű x és y koordinátái. Amint elérte a célpontot frissítette a pontos koordinátáit az irányítás felé. Ha a jármű a megadott időkereten belül, amit a távolság és a jármű sebessége alapján előzetesen kalkuláltak, nem érte el a célpontot, megállt és hibajelzést küldött az irányító központ felé. Ekkor a következő navigációs pontok törlődtek, mert a rover nem ott volt, ahol lennie kellett. Amennyiben a jármű bármilyen akadályt észlelt a közötte és a célpont között lévő egyenes útvonal közben, akkor megállt és álló helyzetben elkezdett addig fordulni, amíg az akadály generálta figyelmeztető jelzés fennállt. Amint a jelzés megszűnt félhossznyi távolságot halad előre, majd visszafordult ismét a cél irányába. A rover memóriája nem raktározta el az egyes akadályokat. Az akadályok jelzésére a következő szenzorok álltak rendelkezésre: szikla közelségérzékelő, lejtő és meredek emelkedő érzékelő, dőlés érzékelő, kontaktusérzékelő. A sziklák érzékelése a jármű elején található kamerák és 5 db lézersugár segítségével történt. A lézerek úgy voltak elhelyezve, hogy ferdén a talaj felé mutassanak, de különböző szögben. Sima egyenes talajon a lézersugarak végén amint érintették a talajt egy fényes pont jelent meg, amit a kamerával érzékelni lehetet a fénysugárral együtt. Sima egyenes akadályoktól mentes talajon minden lézersugár esetén a pontok mindig ugyanott helyezkedtek el a kamera felvételén. Ha azonban valamilyen akadály, szikla állt ki a talajból a lézersugár nem ért el a talajig, a végén lévő pont pedig máshol helyezkedett el a kameraképen, közelebb került a lézersugár mentén a járműhez. Több lézersugárról készült felvétel és a pontok távolságának mérése alapján tehát a jármű le tudta tapogatnia a maga előtt lévő területet. A lézersugarak úgy voltak bekalibrálva, hogy az akadályok észlelése esetén a jármű körül mindig maradjon annyi hely, hogy körbe tudjon fordulni. 70 cm volt a fordulókör. A dőlést egy-egy x, y, z irányú gyorsulásmérő mérte, amelyek a helyi gravitációs vektor és a merőlegesen lefelé mutató eredeti vektor közötti z irányú szöget mérték. 30°-os lejtő volt a maximum, amire a rover még biztonságosan fel tudott menni. A napelem szélére elől és hátul és a rover testének alsó részére elöl kontaktus érzékelőket helyeztek el, amelyek jelet adtak, ha valamihez hozzáértek.
Abban az esetben, ha az akadályok olyan sűrűn helyezkednének el, hogy nem áll rendelkezésre akkora terülte, ahol a rover biztonságosan meg tudott fordulni, engedélyeztek a rover számára, hogy egy előre definiált távolságot haladjon előre, ha még éppen elfér két akadály között. Ha ez alatt talált megfordulásra alkalmas helyet, akkor a jármű megfordult, ha nem visszament a manőver kezdőpontjára és egy másik irányba indult el. A Pathfinder és Sojourner hét hónapos utazása alatt az RCW munkatársai folyamatosan gyakoroltak. Felépült egy homokkal és kövekkel borított tesztpálya, amelyben lehelyezték a Sojourner földi gyakorlópéldányát. A területen a marsi környezetnek megfelelő világítási viszonyokat hoztak létre. A gyakorlópéldánnyal való kommunikáció a lehető legpontosabban szimulálta a jövőbeni marsi kommunikációt, az irányítás csak az RCW-n keresztül látta a rovert és a környezetét. Egy munkatárs feladat pedig az volt, hogy különféle hibákat és nem várt eseményeket idézzen elő, amivel az irányításnak meg kellet tudni birkóznia. A gyakorlás fontos és értékes tapasztalatokkal látta el az irányító csapatot, azon kívül, hogy gyakorlási lehetőséget biztosított az élesben történő feladatok végrehajtásához. Ez által derült ki például, hogy a tervezett Wheel Abrasion Experiment (WAE) talajkoptatási kísérletekhez speciális megvilágításra van szükség. A rover tervezésénél a fő szempont a rendszer működőképességének igazolása volt, ezért valamint a tömeg és méretkorlátozás miatt egy kisméretű járművet alkotott meg a JPL csapata. Az elkészült rover 65 centiméter hosszú, 48 centiméter széles és 30 centiméter magas lett, tömege pedig 10,6 kg volt. Útközben a Pathfinder-en belül a jármű felfüggesztése össze volt csukva, ebben az állapotban mindössze 18 cm magas volt. Szerkezetének fő elemét a Warm Electronics Box nevű hasáb alakú egység alkotta. Ebben kapott helyet a rover vezérlő számítógépe és elektronikája, az UHF modem és 3 darab akkumulátor. A rover vezérlését egy 80C85 típusú számítógép végezte, amely százezer parancs tudott maximálisan végrehajtani másodpercenként és 0,5 Mbyte RAM-al rendelkezett. A marsi hideg miatt a rover akkumulátorait és elektronikáját egy aerogél szigetelésű szálerősítésű műanyag doboz vette körül, amit három radioizotópos fűtőegység melegített. A fűtőegységek folyamatosan -40 és +40 °C-ok között tartotta a WEB-en belüli hőmérsékletet. A WEB tetején helyezkedett el a negyed négyzetméter felületű napelem, amely az energiát biztosította a járműnek és a Material Adherence Experiment (MAE) anyagtapadási kísérleti eszköz. A gallium arzénid germánium napelemek 16,5 W teljesítményt és 14-18 V feszültséget adtak le, amikor a Nap legmagasabban állt a marsi égen. Éjszaka a három lítium tionil-klorid akkumulátor látta el energiával a rovert, amelyek 108 Wh energiát tudtak biztosítani +25°C-on és 72 Wh-t -20 °C-on. A WEB külsejére szerelték föl a felugró UHF antennát, amivel a jármű a Pathfinder-en keresztül tudott kommunikálni a Földel. A rover műszereit egy alfa-proton röntgen spektrométer (APXS) és három darab kamera alkotta. Az APXS a mainzi Max Planck Intézet és a Chicagói Egyetem közös fejlesztése volt, az alfa részecske és proton spektrométer részét az előbbi, röntgen spektrométer részét az utóbbi készítette el. Az APXS szenzorját egy kinyújtható karon helyezték el, ami lehetővé tette a marsi talaj és a különböző sziklák vizsgálatát is. A műszer a vizsgált minta elemi összetételét volt képes megállapítani. A műszer elektronikája a WEB-en belül helyezkedett el. A műszer szenzor része alfa-részecske forrásokból és detektorokból állt. A vizsgálat során a mintát alfa-részecske sugárzásnak tették ki, a besugárzás során ismert energiájú alfa-részecske, proton és röntgensugárzás keletkezett, amelyek energiaspektrumát a detektorok segítségével mérve megállapítható volt a minta elemi összetétele. Az alfa-részecskék segítségével a könnyebb elemeket, a protonok segítségével a 9 és 14 közötti atomszámú elemeket, a röntgensugarak segítségével pedig a nehezebb elemeket lehetett azonosítani. Az APXS műszer kinyújtó mechanizmusában is elhelyeztek egy kontaktus érzékelőt, ami jelezte a rovernek, hogy a műszer megfelelő pozícióban van a méréshez. A két fekete-fehér sztereó kamerapárt és egy darab színes kamerát, valamint a lézersugarak kibocsátó eszközeit a jármű menetirány szerinti elejére, az APXS műszert pedig a hátuljára helyezték el.
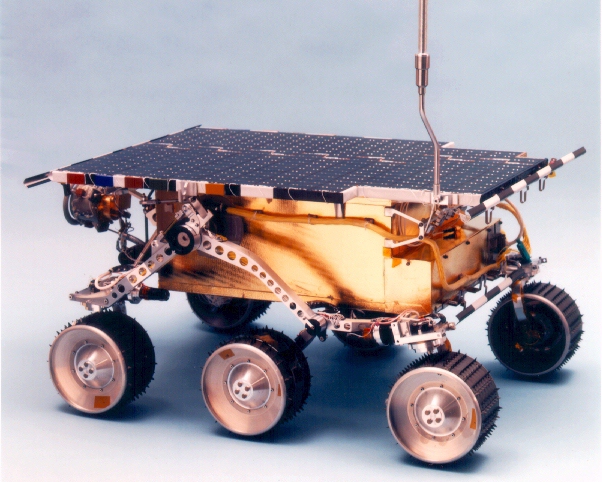
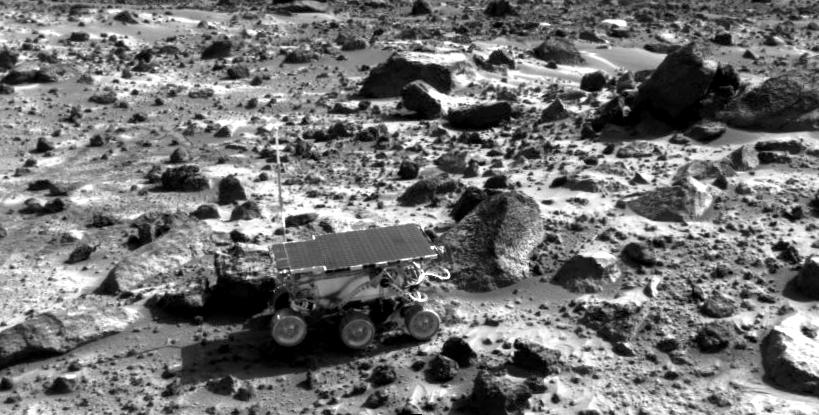
A Sojourner rover földi makettje
Forrás: Mars Microrover Power Subsystem
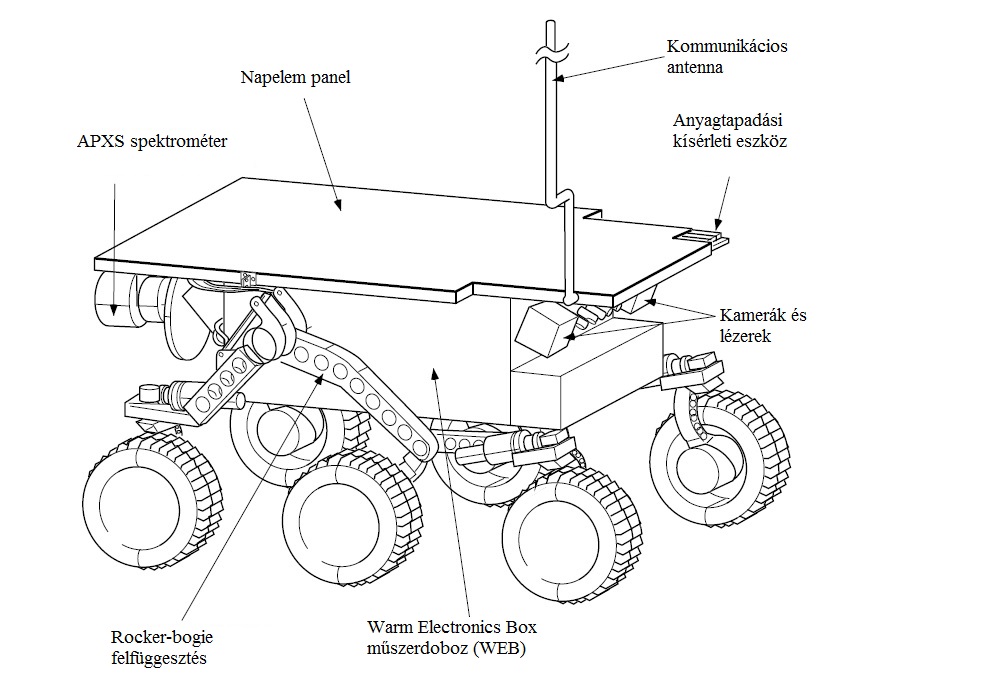
A rover részei.
Forrás: NASA Facts Mars Pathfinder

A Sojourner az utazás közben összehajtva helyezkedett el a Pathfinder egyik napelem paneljén, hogy minél kisebb helyet foglaljon el.
Forrás: A Description of the Rover Sojourner
Az 1980-as években a JPL több tanulmányt is végzett az önjáró bolygókutató járművek felépítésével kapcsolatosan. Többféle konstrukciót vizsgáltak meg, köztük lábakkal rendelkező és lépegető, valamint hagyományosabb felépítésű, kerekkel rendelkező járműveket is. A lábak esetén azonban az irányítási problémák meghaladták az akkori technika szintjét, ezért és a költségek féken tartása miatt a kerek felé indultak tovább a JPL mérnökei. Első megoldásként egy négykerekű szerkezetet vizsgáltak meg, de ez a konstrukció nehezen boldogult az akadályok megmászásával, főleg a kerék átmérőjét meghaladó magasságúakkal. 3,5-szeres kerékátmérő méretű tengelytávval és a kerekek között félúton elhelyezett tömegközépponttal a jármű képes lett volna megmászni a függőleges oldalfalú sziklákat is, ha a súrlódási együttható 0,77 vagy annál nagyobb. A hátsó kerekeknél azonban 1,4-es súrlódási együtthatóra lett volna szükség, ami túl nagy értékű volt. Egy hatkerekű konstrukció esetében azonban ezek az értékek 0,8-ra adódnak előre és hátrafelé menet esetén is. Így ugyan egy komplexebb szerkezetet kaptak, de az előnyök miatt végül ez a kialakítás lett a végleges. Nyolc kerék használata még ennél is jobb értékeket eredményezett volna, de az a költségvetésbe már nem fért bele. A hat kerék esetén, ha két első vagy hátsó kerék felmászik valamilyen akadályra, akkor a négy további kerék még elegendő vonóerővel rendelkezik ahhoz, hogy túl tudja juttatni a rovert az akadályon. Továbbá a hatkerekű konstrukcióval nagyobb tapadás érhető el és egy keréknek az össztömeg kisebb részét kell emelnie. Az alumíniumból készült kerekek 130 mm átmérőjűek, valamint 79 mm szélesek voltak és mindössze 1,65 kPa nyomást fejtettek ki az alattuk lévő talajra, ami nagyon kicsi érték (összehasonlítva egy modern gépjármű átlagosan 240 kPa nyomást fejt ki a talajra kerekenként). A tapadás további növelése érdekében a kerekek külső felületére 10 mm magas bordákat tettek, amelyeket 0,127 mm vastag rozsdamentes acélból készültek. Ennek a kialakításnak az az egy hátránya volt, hogy különbség adódhatott a laza és kemény felszínen történő haladás hosszában, ami esetlegesen megzavarhatta az autonóm navigációs rendszer működését. A Sojourner jobb oldalon lévő középső kerekére nagyon vékonyan (200 - 1000 ångström) különböző anyagokból - alumínium, nikkel, platina - képeztek bevonatokat. A kereken lévő bevonatok felületén a fény visszatükröződését egy fotóvoltaikus szenzor mérte. A Wheel Abrasion Experiment (WAE) nevű kísérlet során a Sojourner ezzel a kerekével ásott egy kisebb lyukat a talajba, miközben a szenzor mérte a visszatükröződés változását és a bevonat kopását. Ennek a kísérletnek az adatait a későbbi roverek kerekeinek tervezésénél szerették volna felhasználni. Emellett a Soil Mechanics Experiment SME keretében a kiásott lyuk elemzése a talaj mechanikai tulajdonságairól nyújtott információkat. A Sojourner egyedi felfüggesztése rocker-bogie (hintaszék forgóváz) néven terjedt el. Az első és középső kerekek egy-egy rúddal voltak egymáshoz rögzítve, ezek alkották a bogie-kat (forgóvázat) és szabadon elfordulhattak lefelé és fölfelé a felfüggesztés többi eleméhez képest. A rocker (hintaszék) karok tartalmazták a hátsó kerekeket, a rover testéhez kapcsolódó forgópontot és azt a csuklót, amivel a bogie-k kapcsolódtak a rocker-ekhez. A csuklók képesek voltak elviselni a hőtágulást. A felfüggesztés bólintó, azaz oldalirányú forgómozgását (a hosszanti x tengely körül) egy differenciálmű kontrollálta, amely összekötötte a kétoldali felfüggesztést a jármű testének tetején. A differenciálmű egyenetlen terepen haladva a felfüggesztés két oldalát ellentétes irányokban tudta kitérítetni, így a jármű teste végig nagyjából vízszintesen tudott maradni. Az egész felfüggesztés nem tartalmazott rugalmas elemet, ezzel is a tapadást tudták javítani. Ez a felfüggesztés lehetővé teszi, hogy a jármű megmásszon olyan akadályokat is, amelyek hossza több mint 30%-át teszik ki a jármű hosszúságának, illetve a legfeljebb 20 cm magasságú kövek fölötti elhaladást is. Mindegyik kerék önálló meghajtással rendelkezett, amely egy egyenáramú motorból és egy 2000:1 áttételű bolygóműves áttételből állt. A kerekeknél száraz kenőanyagot használtak, csapágyaik műanyag golyókból és alumínium házból álltak. A négy ponton érintkező egysoros golyóscsapágy képes volt felvenni a radiális, az axiális és a nyomatéki erőket is, amik a kerék oldaláról érkeztek. Az elektromos motorok kommutátorainál muszáj volt némi olajt használni, ezért ezekre a helyekre fűtő egységek kerültek be az olaj besűrűsödésének megakadályozására. A költséghatár megtartása miatt a motorok és fogaskerekek enyhén módosított, kereskedelemben is kapható elemek voltak. A hat kerék közül a szélső négy egymástól függetlenül elforgatható. Így a jármű képes egyhelyben megfordulni, illetve oldalazó mozgást is végezni, akárcsak egy rák. Megvizsgálták a mind a hat kerék kormányozhatóságának a kérdését is, de a felmerülő költségek meghaladták volna a keretet, ezért elvetették ezt az ötletet.
Az első megközelítésben a rovert a Pathfinder középső panelján helyezkedett volna el, kerekeivel közrefogva a Pathfinder elektronikájának dobozát. Később ez az elképzelés megváltozott és a jármű az egyik oldalsó panelre került át. Itt azonban csak úgy fért el, ha a felfüggesztést összecsukják és a rover alja érinti a panelt. A leszállás után a hátsó kerekek előre mozgatásával és a többi kerék befékezésével a jármű szétnyitotta a felfüggesztését és mindkét oldalon egy-egy zár ebben a pozícióban rögzítette a felfüggesztés elemeit. Így a jármű elérte az üzemi magasságát. Legnagyobb sebesség 1 cm/s-os lehetett és maximum 500 métere távolodhatott el a Pathfinder-től. Ez volt ugyanis az a kommunikációs limit, amit az UHF modem még el tudott viselni. A rovert hét napos élettartamra tervezték, ennyit kellett kibírnia mindenféle meghibásodás nélkül. Két teljesen azonos rover épült, a második példány tartalékként szolgált, később ennek segítségével a földi tesztpályán tudták ellenőrizni a Sojourner-nek küldendő parancsok végrehajthatóságát és megfelelőségét. A rover nevét rendhagyó módon egy általános és középiskolai diákok között meghirdetet esszépályázat győztese alapján választotta ki a NASA. Az 1995 januárjában meghirdetett pályázatban olyan nőkről vártak esszéket, akik történelmet formáló életúttal rendelkeztek. Több mint 3500 esszé érkezett be a világ minden tájáról az űrügynökséghez. Végül a 12 éves Connecticut állambeli Valerie Ambroise esszéje alapján a rovert Sojourner Truth-ról nevezték el. Sojourner Truth, eredeti nevén Isabella Van Wagener, a rabszolgatartás ellen és női jogok mellett küzdő afro-amerikai reformista nő volt az amerikai polgárháború időszakában. Mindemellett a Sojourner szó az angolban utazót jelent, ami tökéletesen illet a roverhez. A tartalék rover a lengyel származású Nobel-díjas francia fizikus és vegyész után a Marie Curie nevet kapta. Az űrszonda útja során az utazó fokozat látta el energiával a Pathfinder-t és a Sojourner-t. Összesen 2,5 négyzetméter területű napelemei 178 W teljesítménnyel üzemeltek. Az utazó fokozaton voltak elhelyezve a helyzetszabályzó rendszer és a pályakorrekciós hajtóművek is. A repülés során az űrszonda pályáját a fedélzeten lévő AIM (Attitude and Information Management) nevű számítógép ellenőrizte csillag- és napkövető szenzorok segítségével. 200 csillag adatait helyezték el a rendszer adatbankjában. Az összeszerelt űrszonda teljes tömege 894 kg, átmérője 2,65 méter, hossza pedig 1,5 méter volt. A stabil pályán maradás érdekében az utazása alatt végig 2 fordulat/perces sebességgel forgott a saját hosszanti tengelye körül. A Pathfinder űrszonda eleminek összeillesztése 1996. április 29-én kezdődött meg a JPL-ben. Ekkor a leszálló egységet tartalmazó áramvonalas burkolatot összeszerelték az utazó fokozattal. Két nappal később vákuum kamrában szimulálták az űrbeli körülményeket, az űrszondát nitrogénnel hűtötték le, miközben xenon- és infravörös lámpákkal világították meg. Június 25-én tesztelték a leszálló egység és a rover működését. A rovert a mozgatása során folyamatosan hideg levegővel hűtötték, hogy a marsi körülményekhez hasonló hőmérsékletet hozzanak létre. Július folyamán tesztelték a leszálló egységet egy kék szobának nevezett helyiségben, ahol a marsi légkörhöz hasonló ritkaságú atmoszférát hoztak létre, miközben a hőmérséklet egy marsi nap szerint ingadozott a teremben. Az űrszonda elemei 1996 szeptemberében érkezetek meg a Kennedy Űrközpontba, ahol újabb teszteknek és minőségbiztosítási ellenőrzéseknek vetették alá őket. Itt került sor a légzsákok felszerelésére. Októberben a rovert elhelyezték a Pathfinder egyik oldalsó lenyitható paneljén, összehajtották a leszálló egység paneljeit, a leszálló egységet ráhelyezték a hő pajzsra, majd ráengedték az áramvonalas burkolat. Ezután az egész egységet kiegyensúlyozás céljából ráhelyezték egy centírozó állványra, amely 70 fordulat/perc sebességgel forgatni kezdte az egységet. Október 22-én összeszerelték a leszálló és az utazó fokozatot. November 4-én feltöltötték az utazó fokozat hajtóanyagtartályait hidrazinnal. Ezt követte még egy centírozó teszt 70 fordulat/ perc sebességgel. Ezután az összeszerelt űrszondát behelyezték a Delta II hordozórakéta orrkúpja alá, majd a rakétát kivontatták a Kennedy Űrközpont 17B indítóállásába.

1996. december 4-én hajnalban a Pathfinder és a Sojourner megkezdte utazását a vörös bolygó felé.
Forrás: NASA
A Pathfinder és a Sojourner 1996. december 4-én keleti parti idő szerint hajnali 1:58:07-kor startolt. A Föld körüli pályát elérve a Delta II harmadik fokozatának újbóli begyújtásával az űrszondát elindították a Mars irányába. A harmadik fokozat ezután levált. A sikeres szétválás után a Deep Space Network hálózat Kaliforniában lévő 34 méter átmérőjű antennája venni kezdte az űrszonda jeleit. Az űrszonda forgásának sebességét a Hold pályájának elhagyása után 20-ról 2 fordulat/ percre csökkentették. Ezután megkezdődött egy kéthetes kalibrálási és karakterizálási időszak, amely során ellenőrizték az űrszonda napelemeit, akkumulátorait, hőszabályzó, helyzet meghatározó, vezérlő és kommunikációs rendszereit. 15 nappal a fellövést követően elvégezték a rover és műszereinek ellenőrzését is. A repülés során négy pályamódosítási manőverre került sor, az elsőt 1997. január 4-én végezték el és 75m/s-mal változtatták meg az űrszonda sebességét. Ezután átálltak megfigyelési üzemmódra, amely során a szondával való kommunikációt hetente három napra és naponta 3 alkalomra csökkentették. A második pályamódosítási manőverre február 3-án, a harmadikra május 7-én került sor, amelyek során először 10 m/s-mal, másodjára pedig kevesebb, mint 1m/s-mal változtatták meg az űrszonda sebességét. 45 nappal a Marsra érkezés előtt megkezdték a felkészülést a landolásra és elindították a végső ellenőrzéseket. Az utolsó pályamódosítási manőver június 24-én 0,5 m/s-mal változtatta meg a sebességet. 5 nappal a landolás előtt a leszálló egységet hő pajzzsal előre fordították és felpörgették 10 fordulat/ percre. Levált az utazó fokozat és 497 millió kilométer megtétele után a Pathfinder 26 460 km/h-val belépett a Mars légkörébe. Az űrszondát a hő pajzs leválása után kinyíló ejtőernyők szuperszonikus sebességről 68 m/s-ra lassították le. 355 méter magasban kevesebb, mint egy perc alatt felfújták a légzsákokat. Az űrszondát 13 m/s-os vízszintes irányú szél érte leszállás közben, ami azonban tűréshatáron belüli érték volt. A három szilárd hajtóanyagú fékezőrakéta 98 méter magasban indult be és 21,5 méter magasságig működött. Ezután a szabadon eső légzsákok 18 m/s-os sebességgel csapódtak be a talajba. Az ütközés erejének hatására 15 méter magasba pattant vissza a szerkezet, majd 14 - 15 pattanás után, 2,5 perc elteltével ált meg a talajon. Ekkor nagyjából 1 km-re volt az eredeti talajtérés helyétől. A Pathfinder 1997. július 4-én csendes óceáni időzóna szerint délelőtt 10:07:25-kor sikeresen landolt a Mars felszínén az északi szélesség 19° 7′ 48″, nyugati hosszúság 33° 13′ 12″ ponton. A leszállás helyét az előző évben elhunyt amerikai csillagász után Carl Sagan Emlékállomásnak nevezték el. Innentől kezdve az irányító központ munkatársa átálltak a marsi időzónára. A Mars 24 óra 37 perc 22.7 másodperc alatt tesz meg egy teljes fordulatot a tengelye körül, ez számít egy marsi nap hosszának. Ez az időtartam nagyon közel van egy nap hosszához, de mivel nem teljesen egyezik meg, ezért megkülönböztetésül solnak nevezték el és a továbbiakban ez lett a misszió időtartam számításának alapja. A navigáció megkönnyítése céljából az irányító központ munkatársai a leszállóhely körüli tereptárgyakat mindenféle, médiából, irodalomból, filmekből és rajzfilmekből vett nevek alapján nevezték el. Ezek a nevek azonban nem hivatalosak, hivatalos elnevezést csak a Nemzetközi Csillagászati Unió bizottsága adhat ki. Nagyjából 90 perccel a landolást követően teljesen kinyílt a három darab háromszög panel és a leszálló egység felkészült az akkumulátorok feltöltésére. Amint a felkelő Nap megfelelő pozícióba került a marsi horizonton megkezdődött az akkumulátorok töltése. A leszálló egység az előzetesen számított területtől 20 km-rel délnyugatabbra ért talajt, enyhe, 2,5° lejtésű területen.
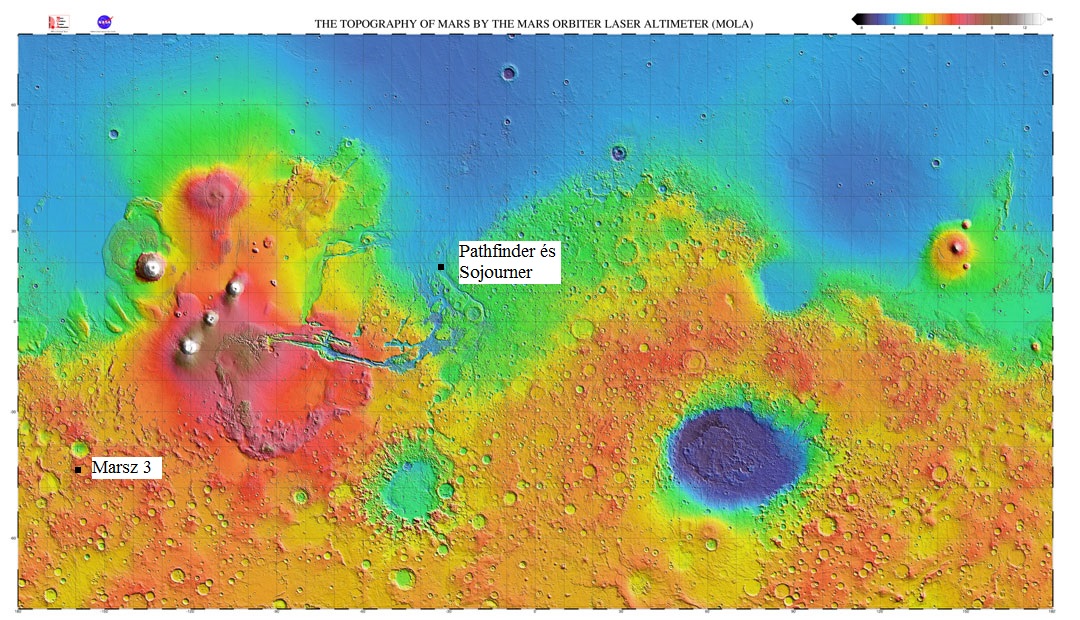
A Marsz 3 és a Pathfinder leszállóhelyei a Mars magasság szerint színezett térképén.
Forrás: NASA
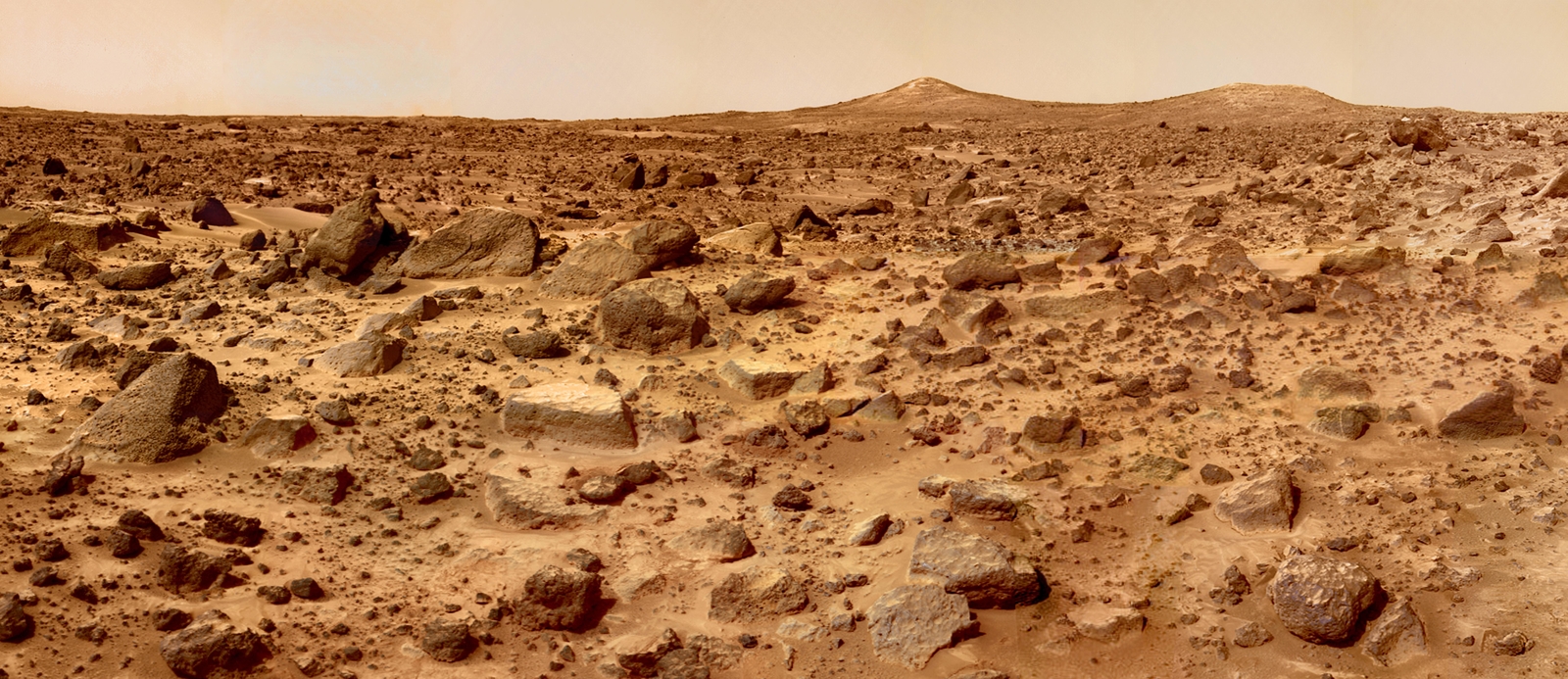
A Pathfinder leszállóhelyéről készült panoráma részlete. Távolban a Twin Peaks-dombok láthatóak.
Forrás: NASA
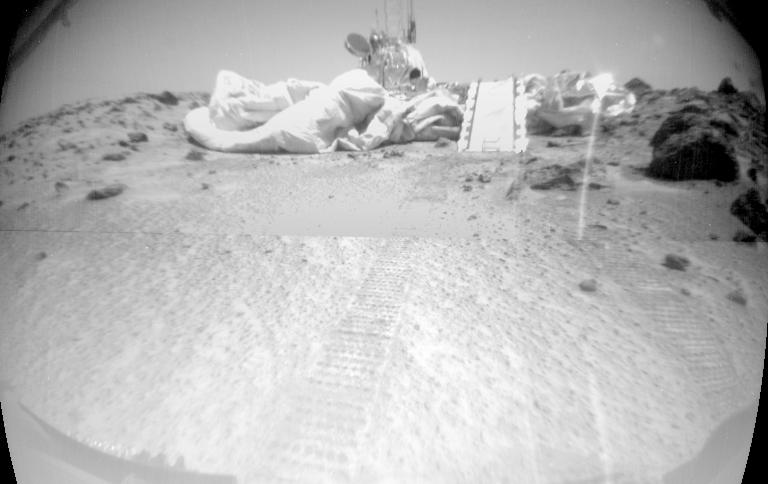
A Sojourner még összehajtott állapotban pihen a sikeres leszállás után. A rover elött és mögött szintén még összehajtva
azok a kinyitható rámpák fekszenek, amelyeken keresztül a Sojourner hamarosan leereszkedik a Mars felszínére.
Forrás: NASA
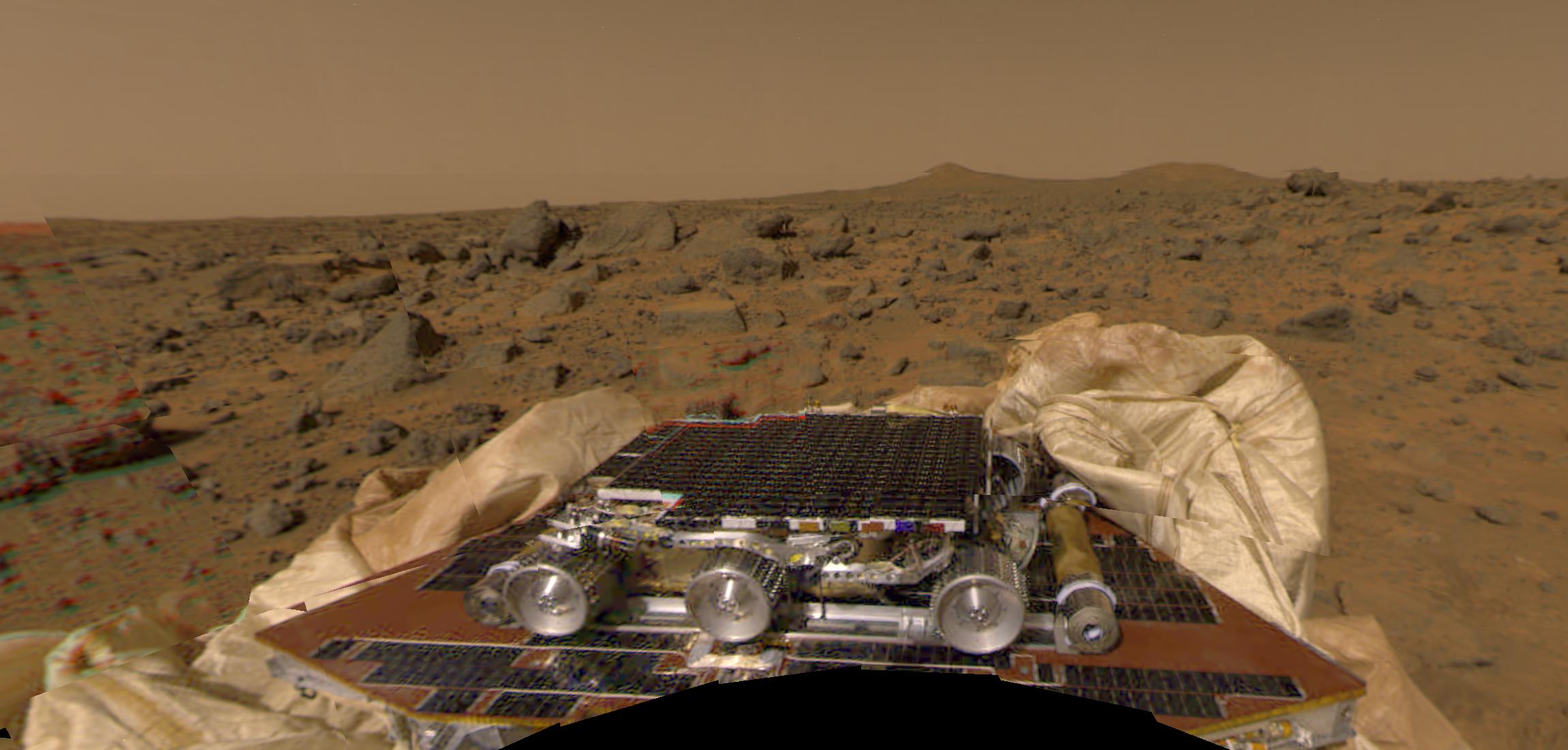
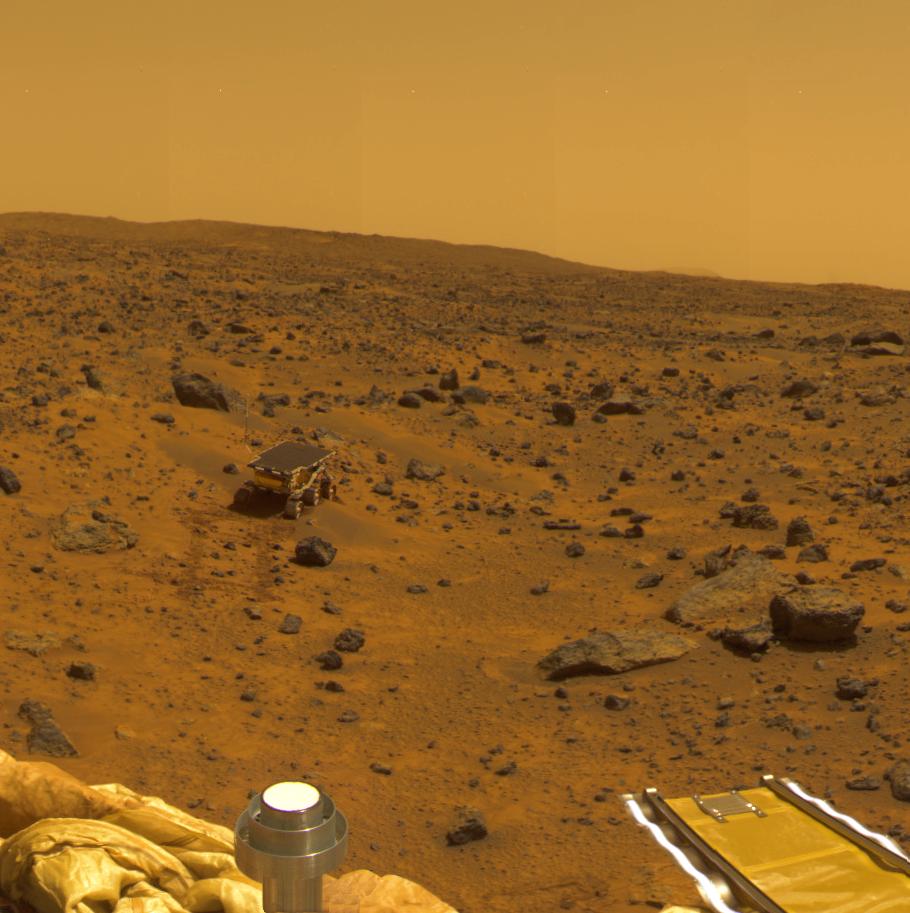
A rámpáról lehajtva a Sojourner megfordult és szeműgyre vette a Pathfinder-t. Jól láthatóak a
leeresztett ballonok, a rámpa és a Pathfinder központi műszerdoboza.
Forrás: NASA
2:07-kor sor került az első kisnyereségű antennával továbbított státuszjelentésre, amely a leszállóegység és a rover egészségi állapotát, a felszíni helyzetüket, a légkörbe lépés, a leszállás és a landolás adatait és a légköri sűrűség- és hőmérsékletmérések adatait tartalmazta. Az első adatok -53 °C-ot mutattak a felszínen. Délután 4:28-kor megérkeztek az első fényképek a leszállási helyről és a leszállóegységről. Egy nagyrészt sík, vöröses-barna homokkal borított terület tárult a szakemberek szemei elé, amelynek középpontjában a leszállóegység állt. A közelben a Pathfinder körül számos kisméretű sötétebb színű szikla helyezkedett el. A távoli horizonton két képződmény, délkeletre a Big Crater, a délnyugatra Twin Peaks nevű dombok látszottak. A fotókon az is látható volt, hogy az egyik légzsák nem eresztett le teljesen és kissé ráterült arra a panelre, amelyen a rover is elhelyezkedett. A légzsák miatt a rámpákat, amiken a rover majd legördül a felszínre nem lehetett biztonságosan lenyitni, ezért az irányítás úgy döntött, hogy 45°-ban megemelik az említett panelt, majd a légzsák teljes leeresztése után ismét visszaengedik a talajra. A művelet sikeres volt és július 5-én mindkét rámpát lenyitották, ezután pedig parancsot adtak a rovernek a felfüggesztése szétnyitására. Ezután a Sojourner 10:40-kor (csendes-óceáni idő) legördült a marsi felszínre. Újabb történelmi lépés született az űrkutatásban, az első földi építésű jármű ott állt egy másik bolygó felszínén. A talajra érés összesen 2 percig tartott. A rover a legközelebbi sziklától 10 cm-re állt meg és az éjszaka alatt az APXS spektrométerrel tíz órán keresztül mérte a talaj összetételét. Majd alvó üzemmódba váltva várta a marsi hajnalt. A 3. solon a Pathfinder kamerája 360°-os, 3D-fényképeket készített a környezetéről. Eközben a Sojourner számára kijelölték az első célpontot, egy Barnacle Bill névre keresztelt szikla képződményt, amely 36 cm-re feküdt a leszállóegységtől. A Sojourner 20°-ot fordult el a szikla felé, megközelítette azt és megkezdte az APXS spektrométerrel történő mérést. Szintén a 3. sol folyamán a leszálló egység kommunikációjának sebességét 8 kb/s-ra növelték. A 4. solon a Sojourner elindult a következő állomása, a Yogi-szikla felé, útközben pedig végrehajtotta az első Wheel Abrasion Experiment kísérletet a Yogi előtti talajon. Eközben elmezte a talajmechanikát is, majd az APXS spektrométerrel megvizsgálta a feltúrt talajt. Július 7-én az irányító központ megkapta az első rover által készített fényképeket a leszállóegységről, másnap pedig a Barnacle Bill elemzésének adatait, ami igencsak meglepte a szakembereket. A szikla szilíciumban gazdagnak és a földi vulkanikus eredetű andezithez hasonló szerkezetűnek adódott. Mivel a Marson jelenleg kevés az aktív vulkán, ezért ez arra enged következtetni, hogy korábban sokkal aktívabb vulkanikus tevékenység zajlott a bolygón. A Pathfinder mérései azt mutatták, hogy a légkör 40 km magasságig közepesen poros, a por egyenletesen oszlik el, az átlagos látótávolság 32 km.

A 3. solon készült képen a Sojourner a Barnacle Bill szikla mellett áll, a jármű elött pedig a
többihez képest hatalmas szikla a Yogi látható.
Forrás: NASA

Napnyugta a marsi égen. A Pathfinder által a 24. solon készített képen központi csillagunk lenyugodni készül a Twin Peaks közelében.
Forrás: NASA
Július 8-án, az 5. solon a Sojourner kerekeivel elvégzett egy talajmechanikai és két WAE kísérletet, ezután a rover lefotózta a Yogi-sziklát, majd megfordult és lefotózta a leszállóegységet is. Majd ismét a Yogi-szikla felé fordult, hogy kiderítse róla homogén vagy összetett szerkezetű-e. Az APXS spektrométerrel az irányító csapat szerette volna megvizsgálni a Yogi egy olyan részét, ami sötétebb színű és a marsi portól mentes. Ezt a részt azonban a 6.solon első nekifutásra nem sikerült jól megközelíteni, mert a Yogi felé közeledve a Sojourner kissé túlfutott a célpontján. Egyik kereke felfutott a sziklára, majd a rover visszatolatott és kissé elfordulva eltávolodott tőle. Ez viszont jó alkalom volt arra, hogy sikeresen teszteljék az autonóm veszélyelkerülési rendszer működését. Korábban a Pathfinder számítógépe még július 5-én ismeretlen okból újraindította magát, azután megfelelően működött egészen 10-ig, amikor is újabb újraindításra került sor. Július 11-én ugyanez megismétlődött. Július 12-én (9. sol) sikerült visszaállítani a rádió összekötetés a Pathfinder-rel és az irányító központ újrapozícionálta a Sojourner-t, ami 9-e (6. sol) óta a Yogi-szikla mellett állt, mert a Pathfinder számítógépének újraindítása miatt nem jutottak el hozzá az új parancsok. A Pathfinder-rel előbb a kisnyereségű antennán keresztül teremtettek kapcsolatot, majd a nagynyereségű antennát a Föld irányába fordítva megérkezett egy adatcsomag a két eszköz állapotáról. Majd a Sojourner-t utasították, hogy jöjjön visszafelé a Yogi-sziklától, a Pathfinder-t pedig, hogy fotózza le a Sojourner mozgását, hogy ténylegesen végrehajtotta-e a parancsot. Később megérkeztek a mozgást igazoló fényképek. Július 13-án (10. sol) az egyórás adat és fénykép továbbítást a leszállóegység számítógépének ismételt újraindítása szakította meg. A mérnökök megpróbálták feltárni a folyamatos újraindítások okát és azt találták, hogy akkor következnek be, amikor a Pathfinder több feladatot végez egyszerre. Ezt követően feltöltöttek egy frissítést, ami priorizálta a feladatokat és ezután a számítógép egyszerre már csak egy feladatot végzett. A 8., 9., és 10. sol során a Sojourner a Yogi-szikla előtt állt és az APXS műszerrel annak anyagát vizsgálta. Az eredmények alapján a Yogi alacsony szilícium tartalmú bazaltnak adódott. Július 15-én, a 12. solon 90 megabit adat és a leszállási hely 360°-os panorámafotójának lemaradt részletei érkeztek meg az űrszondától. A 12. solon sor került a következő WAE kísérletre. Július 16-án, a 13. solon a Sojourner elhagyta a Yogi-t és a Scooby Doo-szikla felé vette az irányt, útközben pedig talajmechanikái vizsgálatokat végzett. Eddig a jármű összesen 3,6 métert tett meg és további 2,3-ra volt szükség a Scooby Doo eléréséig. Útközben a 14. solon újabb WAE kísérletre került sor. Amint elérte a Scoobie Doo-t, a Sojourner kerekeivel lekaparta a legfölső porréteget a szikla felületéről. Ezután meg akarták vizsgálni a Scoobie Doo-t az APXS-el, de a műszer fejrésze túlfutott a sziklán, ezért a rovert július 19-én (16. sol) este újra kellett pozícionálni. Másnap az adatcsomag fogadása során a nagynyereségű antennától gyenge jel érkezett és adatok nélkül. Július 21-én sikerült visszaállítani a kapcsolatot az űreszközökkel és egy újabb szoftverfrissítésre került sor. Ez esetben a hiba a földi oldalon, a Deep Space Network rendszerben volt. Amint az adatok megérkeztek a Scoobie Doo-ról kiderült, hogy a szikla üledékes eredetű. Világos színe ellenére összetétele hasonló a többi körülötte lévő sziklához, bár szilíciumot és kalciumot némileg nagyobb arányban tartalmaz, mint azok. A 17. és 18. solon újabb talajmechanikai vizsgálatokra, a 18. solon pedig egy WAE kísérletre került sor.
Július 22-én, a 19. solon a Scoobie Doo és a Lamb szikla közötti úton a rover a talajt vizsgálta az APXS spektrométerrel. Másnap a rover beleásott a kerekeivel a felszínt borító puha porrétegbe, amely olyan finom szerkezetűnek adódott, mint a púderpor. A porréteget alkotó részecskék mérete kevesebb, mint 50 mikrométer. Július 24-én, a 21. solon a Sojourner 0,7 méter haladt és talajmechanikai vizsgálatokat, valamint egy WAE kísérletet végzett, majd megvizsgálta a talajt az APXS műszer segítségével a Lamb nevű szikla közelében. Ekkor már éjszaka volt a Marson, ezért a rover alvó üzemmódba kapcsolt és a műszer csak az akkumulátorokról üzemelt. Egészen eddig a Sojourner irányítása úgy zajlott, hogy mindig kijelölték a következő útjelző pont x és y koordinátáját. A következő célponthoz, a Souffle-sziklához vezető 3 méteres utat azonban a rovernek a saját veszélyelkerülő szoftvere segítségével kell megtalálnia. Ez sikerült is, július 25-én (22. sol) a Sojourner 25 cm-re megközelítette a Souffle-t. A következő napon egy talajmechanikai és egy WAE kísérletre került sor, miközben az önálló haladást egy fedélzeti számítógép programhiba zavarta meg, amit azonban hamar el tudtak hárítani a programkód átírásával és annak feltöltésével. Július 27-én, a 24. solon a Sojourner elérte a Souffle-t majd felmászott rá, itt azonban nem tudott megfelelő pozíciót találni az APXS műszer méréséhez, így tovább indították a Rock Garden nevű terület felé. Ez volt a rover eddigi leghosszabb útja, több mint 7 métert tett meg, elhaladva a Casper, a Desert, a Princess és a Baker’s Bench nevű sziklák mellett. A Sojourner tovább folytatva útját a következő célpont, a Mini Matterhorn felé elhaladt a Calvin és Hobbes sziklák mellett. Július 29-én, a 26. solon a rover Pathfinder szélzsákjait fotózta. A hőmérséklet -12 és -79 °C között változott napközben. Ezen a napon a rover haladását egy újabb hiba szakította meg, amit azonban gyorsan orvosolni tudtak. Július 30-án, a 27. solon a következő állomás, a Mermaid-dűne felé tartó út háromnegyedének megtétele után a rover elakadt. Egy kisebb kavics akadt be az egyik kerék belsejébe, amit azonban egy rövid tolatással sikerült kimozgatni. Ezt követően a rover a talajmechanikai vizsgálatokat végzett. Július 31-én (28. sol) újabb WAE kísérletre került sor, miközben a Pathfinder befejezte az előre meghatározott tudományos megfigyelési programjának teljesítését. A légkörre vonatkozó megfigyelések alapján a hőmérséklet átlagosan -12 és -76 °C között ingadozott naponta. A légköri nyomás változása azonban sokkal érdekesebb tendenciát mutat. Naponta három, négy alkalommal is tetőzött. A legnagyobb különbség a nyomásértékek között 0,3 millibar volt naponta. A szélsebesség a magassággal együtt növekedik, a hőmérséklet pedig csökken. A talaj közelében 16 és -21 °C közötti hőmérsékletet, de 1,5 méteres magasságban már csak -23 és -27 °C közötti értékeket mért a Pathfinder. Az űrszonda megfigyelt jég-kristályokból álló felhőket a marsi égen a kora reggeli órákban, később ezek felolvadva eltűntek, ahogy a hőmérséklet emelkedni kezdett.
A Sojourner a sötétebb színű homok domb, a Mermaid-dűne tetején a 30. solon.
Forrás: NASA

A Rock Garden-ben a 75. solon készült kép közepén a Shark-szikla látható.
Melette jobbra a Half Dome-, elötte pedig a Desert Princess-szikla helyezkedik el.
Forrás: NASA
Augusztus 1-én, a 29. solon a Sojourner 4 métert tett meg dél felé, a Mermaid-dűnét elérve megfordult és tolatva felmászott rá, majd megkezdte a dűne vizsgálatát az APXS spektrométerrel. A másnapra beütemezett adat letöltés elmaradt egy ismeretlen kommunikációs hiba miatt. A 30. solon 3 talajmechanikai kísérletet végzett a rover a kerekei segítségével Mermaid-dűne tetején. A dűne vizsgálata után három közelben lévő, portól mentes sziklát, a Shark, a Half Dome és a Wedge sziklákat jelölték ki közelebbi vizsgálatra. A 31. solon Pathfindert két solra teljesen leállították, ezen időszak alatt folyamatosan töltötték az akkumulátorait annak érdekében, hogy azok élettartamát meghosszabbítsák. A 33. solon a rover lefotózta az Ender-, a Hassock- és a Yogi-sziklák közötti Pathfinder-t. A 35. sol során a Sojourner elérte a Wedge-sziklát és a 37. sol éjszakáján az APXS spektrométerrel megvizsgálta. Két sollal később talajmechanikai és WAE kísérletet végzett a Wedge közelében. A 42. sol során a rover a Wedge és a Flute Top sziklák között mozgott, lefotózta a Flat Top-sziklát, majd visszafordult a Wedge felé. A 44. solon a rover elindult a Shark-szikla felé és közben 47. sol során bal hátsó kereke felmászott a Wedge-sziklára. Az 52. solon (augusztus 26.) a Sojourner APXS műszerrel megmérte a Shark-szikla összetételét. Másnap (53. sol/augusztus 27.) végrehajtott egy újabb WAE kísérletet. A Shark után a következő állomás a Half Dome-szikla volt, ahol két APXS mérésre került sor. A Sojourner egészen az 59. solig (szeptember 2.) maradt a Half Dome-szikla közelében. Ezt követően folytatta útját a következő célpont, a Moe-szikla felé, amely a Half Dome- és a Stimpy-sziklák között helyezkedett el. Miután a 64. solon (szeptember 7.) elérte a rover APXS mérést végzett a Moe-sziklán. Két sollal később (szeptember 9.) a rover eltávolodott a Moe-sziklától és elindult a Stimpy-szikla felé, amelyet a 68. solon (szeptember 11.) megvizsgált az APXS spektrométerrel. A 70. solon (szeptember 13.) újabb talajmechanikai kísérletre került sor. Ezen a napon a rover lefotózta a távoli Yogi-sziklát az előtte levő feltúrt területtel, amit felszántottak a rover kerekei. Másnap (71. sol/szeptember 14.) a Sojourner elhagyta a Rock Garden-t és a Stimpy-sziklát. Egy nappal később (72. sol/szeptember 15.) délután megérkezett a Chimp nevű sziklához. A 74. és 75. sol során (szeptember 17. és 18.) a rover a Chimp-szikla közelében 12,3 méterre távolodott el a Pathfinder-től, ami a legnagyobb távolság volt, amit a misszió során a rover az űrszondától légvonalban mérve elért. A Sojourner a 80. solon (szeptember 23.) megmérte a Chimp-szikla összetételét az APXS műszerrel. A sikeres program azonban itt hamarosan véget ért. 1997. szeptember 27-én 10:23-kor (világidő) sikerült utoljára felvenni a kapcsolatot a Pathfinder-rel. Az ezt követő öt hónap során minden további kapcsolat felvétel sikertelen maradt, emiatt végül 1998. március 10-én hivatalosan is bejelentették a program végét. Bár a program finanszírozása lehetővé tette volna a 1998 augusztusáig történő folytatást a sikertelen próbálkozások elvették az értékes időt a többi űrszondával – Galileo, Cassini - való kommunikációtól. A kapcsolat megszűnésének oka az volt, hogy a Pathfinder akkumulátorai elértek élettartamuk végére és egyszerűen megadták magukat. Ennek ellenére a Pathfinder és a Sojourner missziója teljes siker volt.
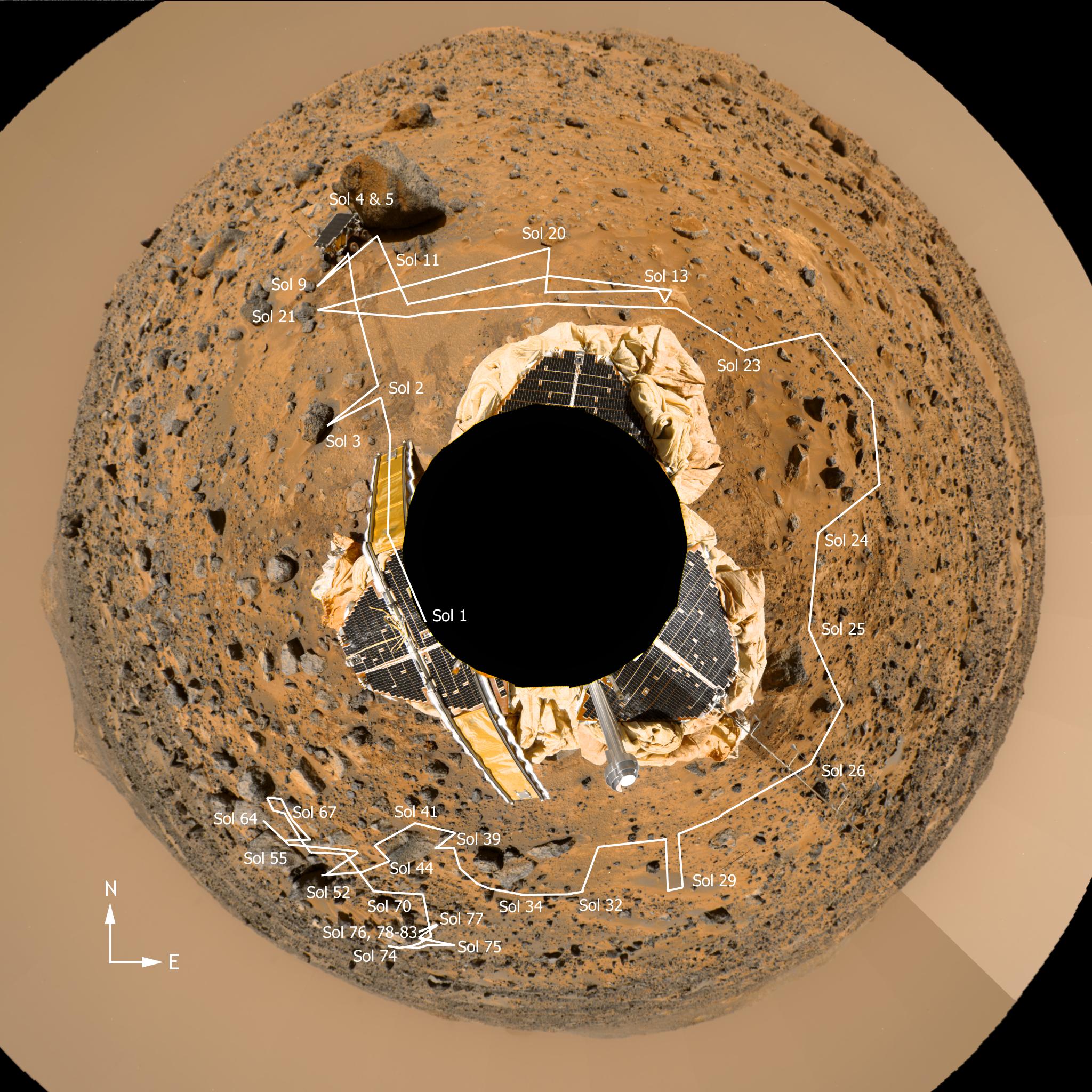
A Sojourner útvonala az 1. és 83. sol között.
Forrás: NASA

A leszállóhely panorámája a Sojourner által meglátogatott sziklák és egyéb képződmények neveivel.
(A kép új lapon megnyitva tovább nagyítható.)
Forrás: NASA
A Sojourner végül 3 hónapig működött, 12-szer olyan hosszú ideig, mint azt előzetesen tervezték. 83 napos működése során nagyjából 100 méter utat tett meg, amely során soha nem távolodott el a Pathfinder-től 12 méternél messzebb. Több mint 550 fényképet készített és 16 különböző helyen végzett kémiai analízist. Ezalatt a Pathfinder 16 500 fényképet készített, továbbá 8,5 millió, a légköri nyomással, hőmérséklettel és szélsebességgel kapcsolatos mérési adatot gyűjtött be és továbbított a Földre. Az összegyűjtött adatokból később számos következtetés sikerült levonni a Marssal kapcsolatban. A leszállóhely környékén talált lekerekített kavicsok arra engedtek következtetni, hogy ezeket a bolygó korábbi melegebb időszakában a felszínen lévő folyékony víz alakíthatta ilyenné, hasonlóan egy földi folyamban található kavicsokhoz. A Pathfinder követése során sikerült precízen megmérni a bolygó forgástengelyét, ami alapján a Mars központi vasmagja 1300 és 2000 km közötti átmérőjűnek adódott. A légkört a felszín melegíti fel, a hőáramlást pedig kis örvények biztosítják. A kerékkoptatási kísérleteket (WAE) a kerékre elektrosztatikusan lerakódó por miatt nem tudták mindig pontosan értelmezni, ennek ellenére megállapították, hogy a Mars felszínének keménysége átlagosan az alumínium és a nikkel keménysége között helyezkedik el. A felszínen lévő szemcseméret kisebb, mint 40 μm. A kísérlet segítségével először sikerült megfigyelni az elektrosztatika jelenségét a Marson. A Pathfinder mágneseihez a 10. és 66. nap között készült fényképek tanulsága szerint folyamatosan ragadt a marsi por, ami azt bizonyította, hogy a por mágneses tulajdonságú, az anyaga pedig valószínűleg maghemit, ami egy nagyon erősen mágnese vas-oxid. A leszállóhely közelében lévő kőzetminták vizsgálati eredményei alapján azok nagy hasonlóságot mutattak a földi vulkanikus eredetű andezithez. A Sojourner tökéletesen ellátta azt a feladatot, amire tervezték. A navigációs- és irányító rendszer is jól vizsgázott, a rendszer használata során a pozíció hiba mindössze 5 - 10 °, a szögeltérés pedig 13 °/nap volt. Bár összehasonlítva a Lunohodok-kal a megtett távolságot és a működési időt tekintve elmaradt tőlük mégis nagyon fontos szerepe volt a Mars roverekkel történő felderítésében, kikövezte az utat az utódjai számára. Éppen ezért 2003-ban a kis rovert beiktatták a különleges robotikai eredményeket elismerő Robot Hall of Fame-be, amelyet a Carnegie Mellon Egyetem ebben az évben alapított meg.
- Meet the Very First Rover to Land on Mars
- The Difficult Road to Mars
- Наш путь через тернии к звездам. История былого величия и мечты о будущем…
- От Лунохода к Марсоходу
- Венероход - созданный, но не запущенный проект СССР
- The Mars Pathfinder Mission Status Reports
- The Fobos mission
- Sojourner: Roving on Mars for the First Time
- Mars Pathfinder
- Mars Pathfinder Nearing Its End
- Autonomous Navigation and the Sojourner Microrover
- Mars Pathfinder Rover—Lewis Research Center Technology Experiments Program
- Roving over Mars
- Location of Experiments
- Driving on the Surface of Mars Using the Rover Rover Control Workstation
- Mars Pathfinder Instrument Descriptions
- Wheel Abrasion Experiment Conducted on Mars
- Mars Pathfinder Landing Press Kit
- NASA Facts Mars Pathfinder
- Beyond Earth - A Chronicle of Deep Space Exploration, 1958-2016
- Mars Pathfinder Past Rover Operations
Kapcsolódó írások
Kerekeken a Naprendszerben 1.
A Lunohod holdjárók
Kerekeken a Naprendszerben 2.
A Lunar Roving Vehicle