Kerekeken a Naprendszerben 4. rész
A Spirit és az Opportunity 1. rész
A Sojourner sikeres útja után hét évnek kellett eltelnie addig, amíg folytatódhatott a roverekkel végzett felderítő és tudományos munka a Mars felszínén. Az előző misszió során szerzett tapasztalatokkal felvértezve a NASA 2003-ban indította el a Mars felé a Spirit és az Opportunity rovereket, amelyek nem kisebb feladatot kaptak, mint a víz és az élet nyomai utáni kutatást. A két rover eredetileg tervezett élettartama 3 hónap volt, ezt azonban mindketten jóval túlszárnyalták. A Spirit 6 évig, az Opportunity ennél is tovább, 14 évig működött a felszínen. Történetüket ebben a részben 2005 végéig követjük nyomon.
A kilencvenes évek végén NASA egymás után indította el űrszondáit a Mars felé. 1998-ban a Mars Climate Orbiter nevű keringő űrszonda, 1999-ben a Mars Polar Lander nevű leszállóegység indult útnak. A 2001-es évre pedig egy összetett missziót tervezett az űrhivatal Mars Surveyor 2001 néven, amelynek keretében két űrszondát, egy keringőegységet és egy leszállóegységet szerettek volna eljuttatni a vörös bolygóig. A keringőegység három évig tanulmányozta volna bolygó ásványtani összetételét, a leszálló egység pedig magával vitte volna a második NASA rovert, ami a talajösszetételt és környezetet vizsgálta volna a felszínen. A keringőegység tudományos programja alatt és annak lejárta után átjátszó állomásként működött volna a rover számára. Az előzetes tervek szerint a Mars Surveyor 2001 leszállóegysége egy Athena nevű rovert vitt volna magával, ami hatkerekű rocker-bogie felfüggesztéssel felszerelve nagyjából 100 cm hosszú, 75 cm széles, 45 cm magas és 60 kg tömegű lett volna. Energiáját a tetején elhelyezett napelemek biztosították. Az Athena tervezése azonban késedelmet szenvedett és úgy tűnt nem készül el az indításig, ezért mentő ötletként a Sojourner tartalék példányával, a Marie Curie nevű roverrel tervezték helyettesíteni. A Marie Curie gyakorlatilag a Sojourner ikertestvére volt. Hasonlóan a Sojourner-hez nappal a leszállóegység közelében 10 méteres hatótávolságon belül tudta volna a marsi környezetet felderíteni, éjszakára pedig hibernálta volna magát. A sors azonban úgy hozta, hogy az Athena után a Marie Curie sem juthatott el a Marsra. A NASA akkori „jobban, gyorsabban, olcsóbban” tervezési filozófiája megbosszulta önmagát és a Mars felé induló űrszondák hibákkal a fedélzetükön hagyták el a Földet. A Mars Climate Orbiter-nek nem sikerült pályára állnia a bolygó körül és a Mars légkörében az aerodinamikai erők hatására széthullott. A Mars Polar Lander leszállás közben lezuhant és darabokra tört. A balsikerek hatására a NASA vezetése felülvizsgálta a folyamatban lévő Mars Surveyor 2001 programot és úgy döntött kiveszi belőle a leszállóegységet és a rovert is. Így a keringőegység végül 2001 Mars Odyssey néven egyedül indult útnak 2001-ben, a következő Marsra induló rover indítását pedig 2003-ra tűzték ki.

A Mars Surveyor 2001 misszió eredeti járműve az Athena rover lett volna, de végül a MER programban
használták fel technológiai demonstrátorként.
Forrás: The Athena SDM Rover: a Testbed for Mars Rover Mobility
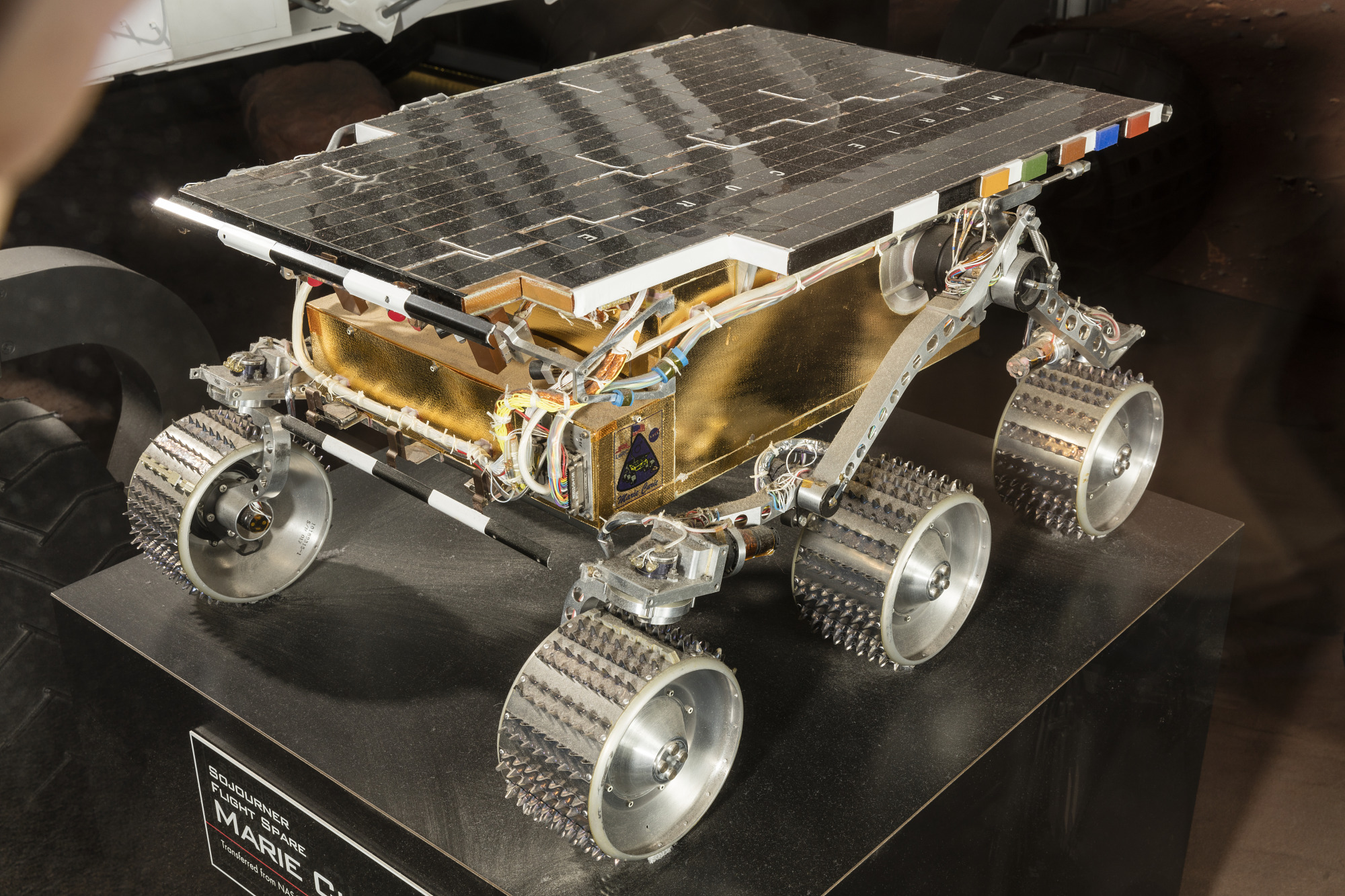
Egy másik rover ami soha nem juthatott el a Marsra. A Sojourner ikertestvére a Marie Curie rover, amely jelenleg a
Smithsonian Múzeum űr- és repüléstörténeti kiállításában tekinthető meg Washington-ban.
Forrás: Smithsonian National Air and Space Museum
A Sojourner tökéletesen vizsgázott, mint technológiai demonstrátor és a járművön alkalmazott technikák életképesek voltak a Mars felszínén. Ahhoz azonban, hogy a szakemberek jobban megismerhessék a bolygót és annak történetét nem elég az a néhány tíz méteres távolság, amit a rover a Pathfinder leszállóegység közvetlen környezetében megtett. A Mars kutatásában részt vevő szakemberek szeme előtt már a következő fontos feladatok, a felszín geológiájának jobb megismerése és víz, valamint az esetlegesen korábban létezett élet utáni kutatás lebegett. Ehhez azonban a következő járműnek jóval nagyobb területet kell majd átvizsgálnia és sokkal nagyobb távolságot, akár több kilométert, kell majd megtennie. A Sojourner néhány műszere csak bizonyos tulajdonságokat tudott vizsgálni a felbukkanó sziklákban, az új rovernek ennél szélesebb műszerparkkal kell majd rendelkeznie. A fent említett okok egy jóval nagyobb méretű rover megtervezéséhez vezettek. A „nyerő csapaton ne változtass” szemléletet szem előtt tartva az új jármű megtervezésének lehetőségét ismét a kaliforniai JPL (Jet Propulsion Laboratory – Sugárhajtás Kutatóintézet) kapta meg. Az új jármű programjának a MER, azaz Mars Exploration Rover nevet adták és a tervezésnél felhasználták az addigra elkészült Athena rovert, mint földi tesztpéldány és technológiai demonstrátort. A NASA már 2000 nyarán elhatározta, hogy a nagyobb tudományos haszon érdekében egyszerre két rovert is indít majd a következő indítási ablakban. Ez az alkalom 2003-ban jött el, amikor a Mars olyan közel került a Földhöz, amelyre évezredekkel ezelőtt volt utoljára példa, mindössze 56 millió km választotta el ekkor a két bolygót egymástól. Az energiafelhasználás szempontjából a lehető legjobb konstelláció adódott, ami értékes plusz tömeget jelentett az indításnál. A JPL tervezőcsapata a Sojourner-nél már bevált tulajdonságokból indult ki az új járművek megtervezésénél. Mindkét rover a saját különálló űrszondájával utazik majd a Marsig. Az űrszondák felépítése hasonló a Sojourner-nél használthoz, a jármű egy leszálló egységen kap helyet, amit egy hő pajzzsal ellátott áramvonalas burkolat vesz körül. Ehhez kapcsolódik az utazó fokozat, amely energiával látja el a rovert a Marsig tartó út alatt, valamint helyzetszabályzó rendszere és pályakorrekciós hajtóműveinek segítségével a megfelelő pályán tartja az űrszondát. A leszállás folyamata szintén megegyezik a Sojourner-éval. Mindkét rover leszálló egysége a légkörbe érkezés előtt leválik az utazó fokozatról, majd előrenéző hő pajzzsal belép a Mars légkörébe. A légköri súrlódásból keletkező hő fejlődés szakaszát elhagyva ledobják a hő pajzsot, majd kinyílnak a stabilizáló- és a főejtőernyők, a leszállóegység felületén pedig felfújódnak a Sojourner esetében is alkalmazott légzsákok. Néhány tíz méter magasságból kioldják az ejtőernyőt, a leszálló egység felszínbe csapódását pedig a légzsákok csillapítják. A leszállóegység megállapodása után lengedik a légzsákokat, kinyitják annak paneljeit, amelyek eddig a rovert burkolták és megkezdődik a rover üzembe helyezése.
A roverek szerkezeti felépítésében szintén visszaköszönt a Sojourner öröksége. Mindkét rover teljesen egyforma volt, hat kerékkel és rocker-bogie felfüggesztéssel rendelkeztek. A Sojourner-hez hasonlóan mindkét MER rover testét a Warm Electronics Box (WEB) nevű doboz alkotta. A WEB tartalmazta a jármű vezérlő-számítógépét, elektronikáját és akkumulátorait. Külső fala megvédte a portól és a mechanikai behatásoktól a berendezéseket. A WEB-et aranyszínű festék borította kívülről, ami nem engedte a belső hőmérsékletet kisugárzódni, illetve megakadályozta azt, hogy a kinti hidegebb levegő lehűtse a belső részeket. A WEB-en belül szilárd szilikon aerogél hőszigetelést alkalmaztak. Nappal a berendezések által termelt hő, éjszaka pedig 8 darab 1 W-os plutónium-dioxid tartalmú rádióizotópos fűtőegység biztosította azt, hogy a belső hőmérséklet -40 és +40 °C-ok között maradjon. A fölösleges hőt a radiátorok sugározták ki. A belső berendezések maximum -45 °C-os hideget tudtak elviselni. A WEB-en belül a Rover Electronics Module (REM) nevű modul tartalmazta a jármű vezérlő-számítógépét, ami VME buszon keresztül csatakozott a többi berendezéshez, műszerhez és szenzorhoz. A vezérlő számítógép kozmikus sugárzás ellen megerősített 20 MHz-es 32 bites Rad 6000 mikroprocesszorral rendelkezett, ami 20 millió utasítás végrehajtására volt képes másodpercenként. 128 MB DRAM-mal, 256 MB flash memóriával és 3 MB EEPROM-mal rendelkezett. A számítógép irányította a kapott parancsok végrehajtását, a Földdel való kommunikációt és adattovábbítás, valamint folyamatosan felügyelte a rover rendszereinek állapotát és a hőháztartást. Az Inertial Measurement Unit (IMU) nevű modul mérte a jármű különbözőirányú dőlését és elfordulását 8 Hz-es frekvenciával. Dőlésérzékelői és gyorsulás szenzorjai információt biztosítottak a rover mindenkori helyzetéről és dőlésszögéről, mindhárom koordinátatengelyre (x, y és z) vonatkozóan. A WEB tetején egy Rover Equipment Deck (RED) nevű háromszög alakú felület kapott helyet. Ide kapcsolódott a jármű energiaellátását biztosító szétnyitható, gallium-arzénid napelemekből álló felület, ami maximálisan 140 W teljesítményre volt képes. A rovernek ebből 100 W-ra volt szüksége a mozgáshoz. A napelemek képesek voltak egy nap alatt 900 Wh energiát biztosítani a rover számára. A megtermelt energiát kettő darab újratölthető lítium ion akkumulátor tárolta, ezek látták el a járművet éjszaka is árammal. A napelemek minél hatékonyabb kihasználása miatt a leszállási zónának a marsi egyenlítőhöz a lehető legközelebb kellett esnie. A Sojourner útjához képest újdonság volt az akkumulátorok töltését, a belső órák ellenőrzését és éjszakai vezérlési feladatokat ellátó akkumulátor vezérlőpanel használata.
A járművek hat darab 26 cm átmérőjű kerekének mindegyike saját meghajtással rendelkezett, ami egy egyenáramú elektromos motorból és a hozzá kapcsolódó hullámhajtóműves áttételből állt. A kerekek külső felülete spirális küllőkkel kapcsolódott a kerékagyhoz. A küllők közötti részt solimide nevű habbal töltötték fel. A spirális küllők és a közöttük lévő hab együttesen lengéscsillapítóként működtek. Az első és a hátsó kerékpár kormányozható volt egy-egy elektromos motor segítségével. A négy kerék-kormányzásnak köszönhetően a rover egyhelyben is meg tudott fordulni. A rocker-bogie felfüggesztésnek köszönhetően a jármű el tudott haladni a legfeljebb 25 cm magas sziklák és kövek fölött, illetve át tudott menni az ugyanilyen széles lyukak és árkok felett is. 45°-os emelkedőket is meg tudott mászni előre és hátramenetben is, azonban biztonsági megfontolásból a vezérlőrendszer csak maximum 30°-os lejtőkön/emelkedőkön engedte fel/lemenni a rovert. A kerekek külső felületére hosszanti bordákat szereltek a tapadásnövelés érdekében. A maximális sebesség 5 cm/s volt, de ezt ritkán használták ki. A vezérlés úgy volt programozva, hogy 10 másodperc haladás után 20 másodperces álló megfigyelés következett, majd újabb 10 másodperc haladás. Így a járművek átlagosan 1 cm/s-mal haladtak csak. A Sojourner-rel való hasonlóságok itt be is fejeződnek. Az új roverek már saját kommunikációs rendszerük révén tudtak kommunikálni a Földdel, nem volt szükség a leszálló egységen elhelyezett átjátszó állomásra. Mindkét rover egy omni-direkcionális kisnyereségű és egy irányított nagynyereségű antennával volt felszerelve, amelyek a Rover Equipment Deck-hez kapcsolódtak. A felszínről a két rover a Mars körül keringő Mars Odyssey nevű űrszonda segítségével kommunikált a Földdel. Az űrszonda 16 perc alatt szelte át a vörös bolygó egét, ezalatt nagyjából 10 percig tudott a roverekkel kommunikálni a járműveken lévő UHF antennák segítségével. A roverek adatait az űrszonda ezután elküldte a Deep Space Network hálózat földfelszíni fogadóantennáinak. 2006-ig a Mars Global Surveyor keringő űrszonda is fogadott adatokat a roverektől. Az adatok egy nagyon kis százalékát pedig közvetlenül a Földre küldte a két rover. Egy marsi napon, azaz sol alatt egy-két kommunikációs alkalomra volt lehetőség. A rovereken helyet kapott egy-egy körbeforgatható kameraállvány és egy-egy robotkar is. A RED tetején lévő kameraállvány a talajtól számítva 1,5 magasságig ért fel, jobb látószöget és nagyobb belátható távolságot biztosított az ide szerelt kamerarendszerek számára. A Marsig tartó út alatt a kameraállvány a jármű tetején feküdt és a leszállás után állították fel. A kameraállvány a saját tengelye körül 360 °-ban tudott elfordulni. A rovereket egyenként kilenc darab kamerával szerelték föl, ezek közül hat a jármű navigációját segítette, három pedig tudományos vizsgálatokat végzett. A kamera állványon helyezkedett el a két darab fekete -fehér navigációs kamera (Navigation Cameras, Navcams), amelyek egyenként 45°-os látószögű sztereó 3D-s képeket biztosítottak a jármű tájékozódásához. A rover menetirány szerinti elejére és hátuljára fekete-fehér sztereó kamera párokat szereltek (Hazard Avoidance Cameras, Hazcams), amelyek alacsony látószöggel a közeli terepről közvetítettek 3D-s képet, így segítve a veszélyelkerülő rendszer munkáját. A Hazcam kamerák fix 120°-os látószöggel rendelkeztek és nagyjából a rover előtti 4 méteres területet látták be. Emellett az elöl lévő pár segítette a robotkar végén lévő műszerek megfelelő pozícióba helyezését is. Az ICER wavelet transzformációs tömörítés segítségével a kamerák által készített fényképek 12 megabites méretről 1 megabites méretűre lettek összetömörítve. Ez lehetővé tette több fénykép egyidejű Földre továbbítását és több fénykép tárolását a memóriában, mint a Sojourner missziója esetén. Minden fénykép 30 darabra lett szétosztva, így próbálták elkerülni annak a veszélyét, hogy egy kommunikációs hiba miatt az egész fénykép elvesszen az adattovábbítás során. A tömörítési eljárást a JPL fejlesztette ki.
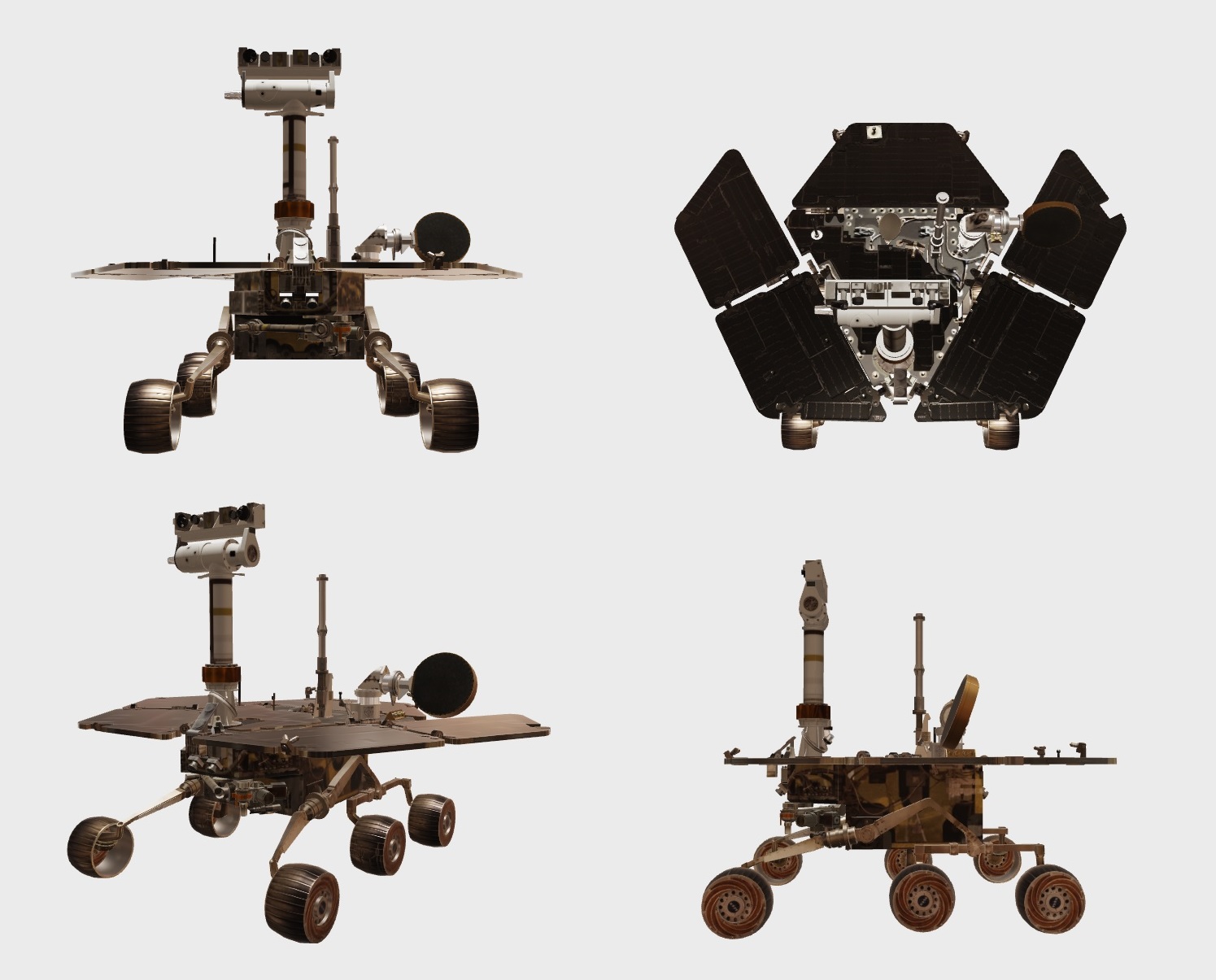
A MER roverek 3D-s modelljéről készült különböző nézetek.
Forrás: NASA Mars Exploration Program
A roverek öt-szabadságfokú robotkarja, az Instrument Deployment Device (IDD) a jármű elejére volt felszerelve. Teljesen kinyújtva 90 cm hosszú volt, három mozgatható csuklóval és 5 db motorral rendelkezett. A központi egységhez legközelebb lévő csukló vízszintesen 160 °-os, függőlegesen 70 °-os szögben tudott mozogni. A középső csukló függőleges síkban 290 °-ban, a robotkar végén található csukló pedig vízszintesen 350 °-ban, függőlegesen pedig 340 °-ban tudott mozogni. A robotkar végén található, toronynak nevezett részt, amely több tudományos műszer szenzorjának az otthona volt a pasadenai Alliance Spacesystems Inc. készítette. Mindkét rover a következő tudományos műszerekkel lett fölszerelve: sztereó panorámakamera rendszer, miniatűr termál emissziós spektrométer, Mössbauer spektrométer, alfa részecske röntgen spektrométer, mikroszkópos képalkotó, szikla felszínt koptató eszköz, mágneses porcsapdák. A színes sztereó panorámakamerák (Panoramic Cameras, Pancam) a kameraállvány tetején a talajtól mérve 1,5 méter magasan kaptak helyet. A két darab, 4000 x 24 000 pixel felbontású, 30 cm-es nyílású színes CCD kamera 360 °-os látószöggel rendelkezik. A lencsék elé 14 különféle színszűrőt lehet helyezni, amelyek többek között színes felvételek készítését és a spektrális analízist is lehetővé tették. A kamerákat a vízszinteshez képest 90°-ban lehet elforgatni felfelé és lefelé is. A Pancam képeit a környezet felderítésére és az érdekesnek ígérkező sziklák kiválasztására egyaránt fel lehet használni. Az eszközt a JPL készítette. A miniatűr termál emissziós spektrométer (Mini-TES) letapogató optikai rendszere a panorámakamerák alatt helyezkedett el. Felfelé a vízszinteshez képest 30 °-ban, lefelé pedig 50°-ban lehetett elforgatni. A készülék infravörös hullámhossz tartományban végzett színképelemzést, analizátor elektronikája a fűtött központi egységben kapott helyet. A műszer meg tudta határozni a vizsgált minta kémiai alkotóelemeit, kifejezett célja pedig a jellegzetesen víz által létrehozott ásványok megtalálása volt. A műszer képei a Pancam mellett segítettek a következő vizsgálandó terület vagy szikla kiválasztásában, emellett az eszköz a Mars atmoszférájának tanulmányozására is használható volt. Az eszközt a Tempe-ben található Arizonai Állami Egyetemen készítették. A Mössbauer spektrométer (MB) a vastartalmú ásványok és a Marson előforduló mágneses jellemzők vizsgálatára szolgált. A műszer érzékelő szenzorja a robotkar végén, analizátor elektronikája pedig a fűtött központi egységben kapott helyet. A műszer két darab radír nagyságú kobalt-57 izotópforrást használt a mérések kalibrálására. Egy mérése nagyjából 2 óra hosszú volt. A spektrométert a mainzi Johannes Gutenberg Egyetemen készítették. Az alfa-röntgen spektrométer (Alpha Particle X-Ray Spectormeter, APXS), mint műszer már a Sojourner útján is jelen volt. Kis mennyiségű kűrium-244-et tartalmazó izotópforrással rendelkezett, amivel a vizsgált mintát besugározta. A mintából a besugárzás hatására létrejövő alfa-részecske-, proton- és a röntgensugárzás kibocsátás mérésére szolgált, amely alapján meghatározható volt a vizsgált minta elemi összetétele. A szenzor része a robotkar végén, elektronikája pedig szintén a központi egységben kapott helyet. Egy mérése körülbelül 10 órát vett igénybe. A műszert a mainzi Max Planck Kémiai Intézetben készítették. A kőtörő-aprító készülék (Rock Abrasion Tool, RAT) egy 72 dkg-os tömegű fúró, amely a legkeményebb sziklákba is képes volt 45 mm átmérőjű és 5 mm mély lyukat fúrni. A megfúrt friss felületet ezután a többi műszerrel meg lehet vizsgálni. A robotkar toronyrészén elhelyezkedő eszközt a new yorki Honeybee Robotics készítette. A monokromatikus mikroszkópos képalkotó (Micrsocopic Imager, MI) egy mikroszkópból és egy 1024 x 1024 pixel felbontású CCD kamerából áll. Az eszközzel fekete-fehér, igen közeli felvételeket lehetett készíteni a talajról és a sziklák felületéről. A képalkotót a JPL készítette és szintén a robotkar végén helyezkedett el. A fent említett műszerek mellett a rover a kerekeivel is tudott tudományos vizsgálatokat végezni. A kerekek képesek voltak alacsony árkokat ásni, amelyekkel a talaj tulajdonságait lehet vizsgálni. A navigációs és veszélyelkerülő kamerák képei szintén segíthettek a következő tudományos célpont kiválasztásában. Továbbá négy helyen olyan mágneses lapocskákat (Magnet Arrays) helyeztek el a rovereken, amelyekkel a marsi por mágnese tulajdonságait lehet vizsgálni. Egy darab a kőtörőn, kettő darab pedig megdöntve a jármű elején kapott helyet úgy, hogy a ferdén elhelyezett felületükről a nem mágneses por le tudott csúszni. A negyedik lapocska a jármű tetején volt elhelyezve, úgy, hogy a panorámakamerákkal tanulmányozni lehet a por lerakodásának folyamatát. A megtapadt port az MB és APXS műszerekkel lehetett analizálni. A mágneses lapocskák a kopenhágai Niels Bohr Intézet fejlesztései voltak.

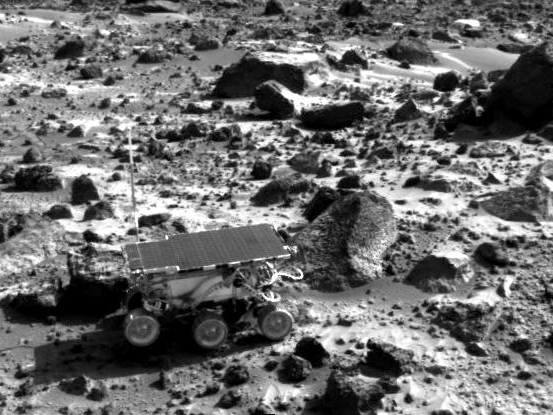
Mögöttem az utódom. Elöl a Sojourner földi makettje mögötte pedig az egyik elkészült MER rover.
Forrás: NASA Mars Exploration Program

Tesztelik az egyik elkészült MER rover futóművét.
Forrás: NASA Mars Exploration Program
Az 1,6 méter hosszú, 2,2 méter széles, 1,5 méter magas, egyenként 185 kg-os roverek 17-szer voltak nehezebbek a Sojourner-nél. A járművek irányítása az autonóm navigációs és veszélyelkerülő rendszer segítségével történt. Az irányító központ személyzete határozta meg a rover következő célpontját a jármű által visszaküldött fényképeken lévő érdekesebb felszíni képződmények alapján, majd a navigációs és veszélyelkerülő rendszer dolgozta ki az odáig vezető útvonalat. A járművek navigációs és veszélyelkerülő rendszerét a Carnegie Mellon Egyetemen fejlesztették ki. Egy marsi nap, azaz sol munkamenete a következőképpen nézett ki; az adott sol elején az irányító csapat elküldte a solra vonatkozó feladat és parancslistát, a nap végén pedig megérkeztek a roverek fényképei és adatai a napi tevékenységről. A parancslistát a Rover Planners, azaz az RP-k tervezték meg. A parancsok egymást követték és kondicionáltak voltak, azaz a következő csak akkor kezdődött meg, ha az előző már sikeresen végrehajtódott. A MER-ek rövid idejű fejlesztése miatt az irányító szoftver nem volt még teljesen készen az indítás előtt, ezért csak az alapvető mozgásokat tesztelték a Földön. Alapvetően két megoldás kínálkozott a rover irányítására; az AutoNav mód és a blind drive mód. Az AutoNav mód alapját a Sojourner-nél már megismert Go to Waypoint parancs alkotta. A sztereó kamerák által készített 3D-s képek segítségével a navigációs szoftver létrehozta a környezet virtuális térképét. Ezekben a térképekben megbecsülhető volt a tárgyak távolsága, elérhetőségüknek nehézségi foka, a lejtőszögek és a megvilágítás viszonyai is. A rendszer a térképek felhasználásával a környezet jellemzői, a sziklák és kövek mennyisége és elhelyezkedésük sűrűsége, valamint a lejtők szögei alapján számos útvonalat generált. Ezek közül azután a legrövidebb és egyben legbiztonságosabb útvonalat választotta ki a célpont eléréséhez. A célponttól 0,5 - 2 méter közötti távolságban a jármű megállt és újabb útvonalszámítást végzett. Ezt a folyamatot addig ismételte, amíg el nem jutott a célpontig, vagy megállásra nem késztette valamilyen akadály. A roverek 16 000 pontot tudnak beazonosítani egy sztereó fényképpáron. A veszélyek azonosításához a rendszer az akadályok méretét és a lejtők szögét vette figyelembe. Az AutoNav mód jó boldogult az akadályok beazonosításával és kikerülésével, de az olyan veszélyes tereptárgyakat, amelyek nem álltak ki a talajból, például laza homok, nem tudta észlelni. A terepfelismerés 3 percet vett igénybe és 50-150 centiméterenként szükséges volt végrehajtani. A blind drive mód használata során lépésekre lebontva megadták, hogy hány fordulatot forogjanak előre vagy hátra a kerekek, illetve milyen irányba és mennyit forduljon el a rover. Ebben a módban lehetett végrehajtani a kerékkel történő árokásást és felületek RAT-al való letisztítását is. A blind drive mód nem használt veszélyelkerülést, a manuálisan megadott mozgásokat a rover felülbírálhatta, ha a terepet túl veszélyesnek talált, törölve ezzel a további parancsok végrehajtását és a jármű további útját. A blind drive módban a rover pozícióját alapvetően a kerekek által megtett fordulatok száma és a jármű IMU egységének elfordulás adatai alapján határozták meg, ez a módszer azonban a kerékcsúszás miatt nem mindig adott pontos értéket. A VisOdom (Visual Odometry) szoftver jóval nagyobb segítséget nyújtott a pozicionáláshoz, mert használatával meghatározható volt a rover pontos helyzete. A szoftver a távolság megtétele előtt és után készült fényképeken lévő kövek, sziklák, keréknyomok, homokdűnék és egyéb tereptárgyak elmozdulását mérte. A szoftver ezután ezekből az adatokból a 3D-s környezeti térkép segítségével pontosan meg tudta határozni a rover által megtett utat. Egyedüli hátránya az idő- és számítási kapacitás igénye volt, 60 cm mozgás megtétele után 3 percre volt szüksége a pozíció meghatározásához, ami igencsak lefoglalta a vezérlő számítógépet. Éppen ezért nem is volt követelmény, csak „jó, ha van” alapon került be a járművekbe. Később azonban nagyon hasznosnak bizonyult az emelkedőkön/lejtőkön történő mozgásnál, ahol a kerékcsúszás miatt a fordulatszámláló módszer nagy hibát eredményezett. Amikor a roverek már a Mars felszínét járták blind drive módban átlagosan 120-130 m tettek meg óránként, AutoNav módban ez az érték már csak 30-35 m, a VisOdom használatával pedig mindössze 10 m volt óránként. Éppen ezért, ahol csak lehetett az irányító csapat a blind drive módot használta.
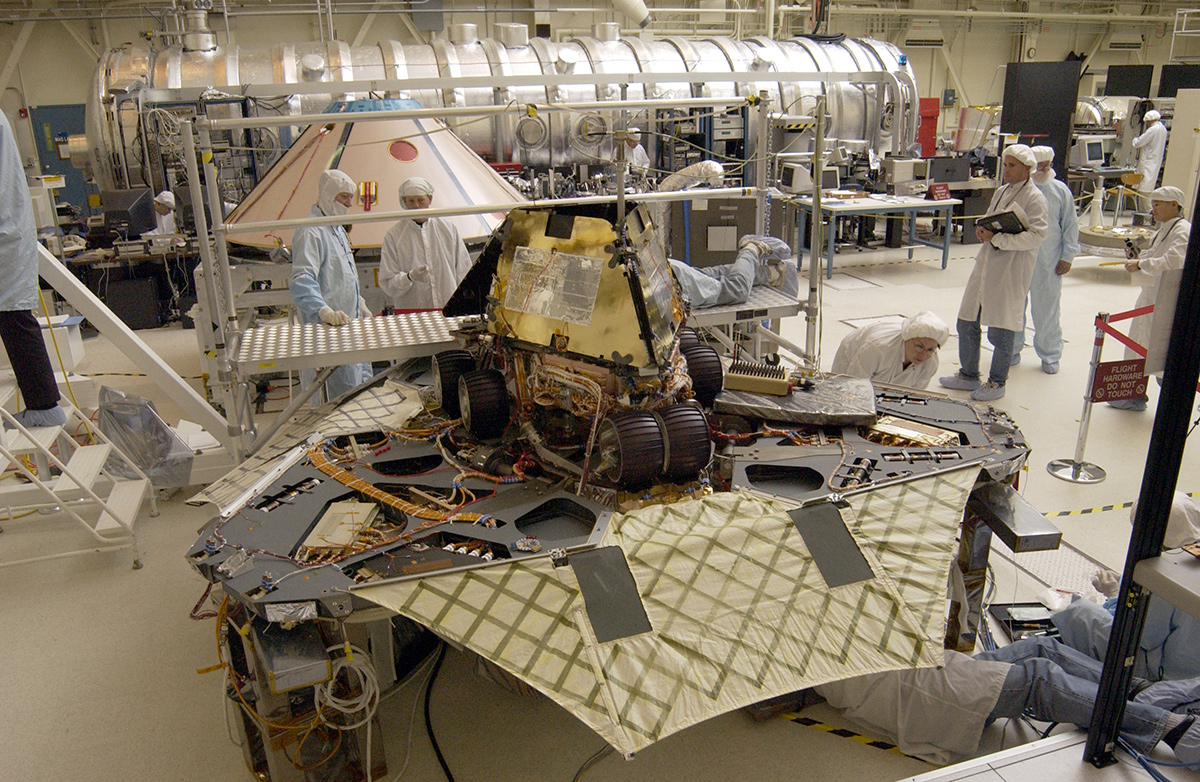
A leszállóegység kinyitott paneljei között a rovernek nem sok hely jutott. Az utazás alatt a futóművet a látható módon szét kellett nyitni,
a napelemek pedig a jármű tetejére voltak felhajtva.
Forrás: NASA Mars Exploration Program
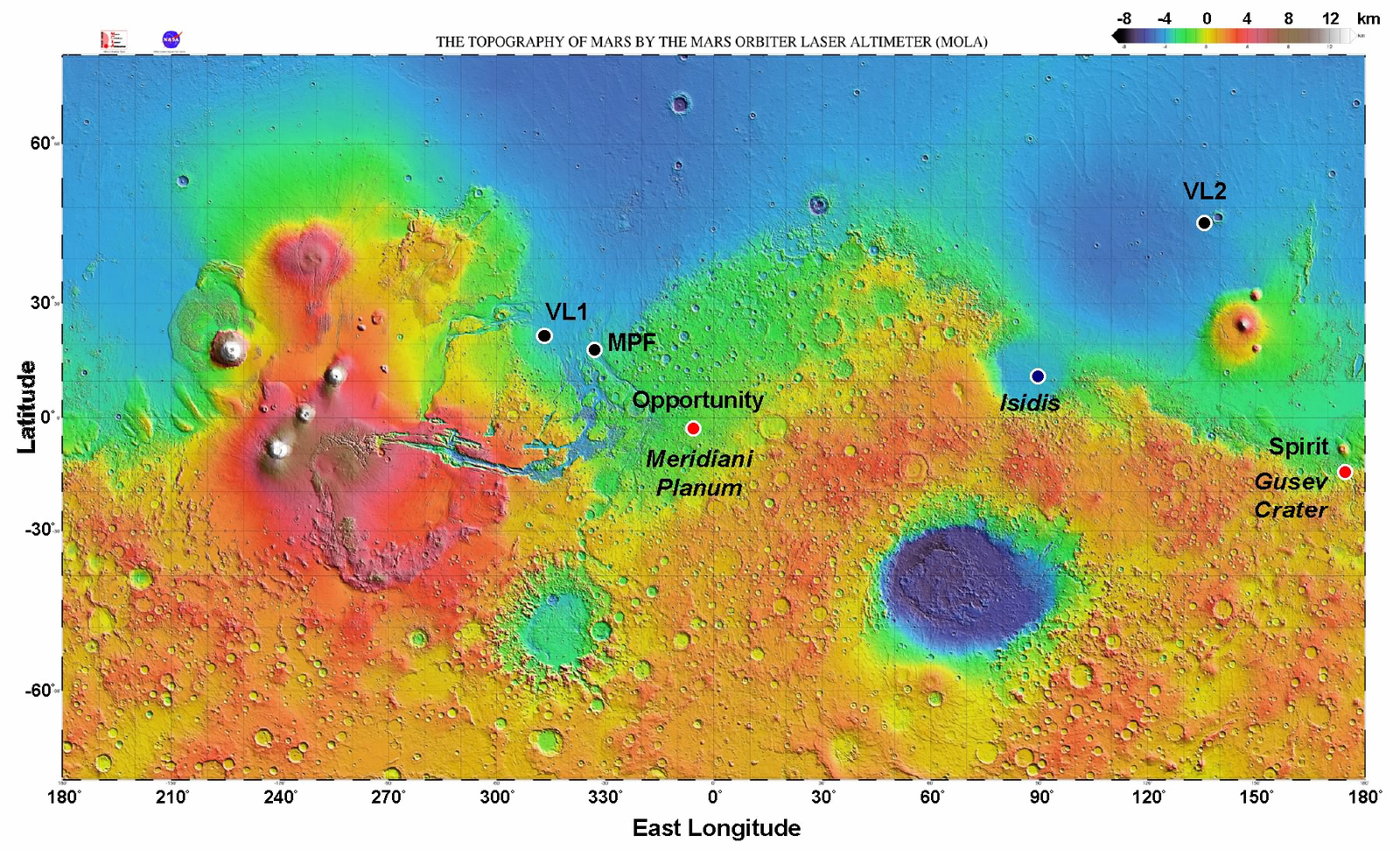
A két MER leszállóhelyeinek elhelyezkedése a Mars magasság szerint színezett térképén. Az Opportunity majdnem az egyenlítőnél, míg a Spirit
jóval délebbre ért földet, ami miatt a déli féltekén lévő teleken utobbi jóval kevesebb napenergiával tudott csak gazdálkodni. A VL1 és VL2 a Viking
űrszondák leszállóegységeit, az MPF a Pathfinder-t és a Sojourner-t, míg az Isidis nevű pont a Beagle 2 űrszonda leszállóegységét jelöli.
Forrás: NASA Mars Exploration Program
A program igazgatója David Lavery, a projektmenedzser a JPL-nél John Callas volt. A roverek műszereinek felelőse Dr. Steve Squyres, a Cornell Egyetem csillagásza, helyettese pedig Ray Arvidson a Washington Egyetem bolygókutatója volt. A rovereket irányító csapatban nagyjából 20-20 fő dolgozott folyamatosan mindkét roveren. A roverek élettartamát 90 napra/solra tervezték, ezalatt pedig szerették volna velük egyenként elérni a legalább 600 méter megtett távolságot. A roverek a Sojourner-éhez hasonló kialakítású leszállóegységek segítségével értek le a felszínre. A 635 kg-os egységek háromszög alakú panelekből álltak, amelyeket tetraéder alakúra hajtottak össze, a rover pedig közepén helyezkedett el. 24 darab Vectran nevű műszálból készült légzsák volt elhelyezve a panelek külső felületén, amelyek felfújódva tompították a felszínbe való becsapódás erejét. A Sojourner-nél nagyobb tömeg miatt dupla falú légzsákokra volt szükség. A Sojourner leszállásához képest új rendszer volt a Descent Image Motion Estimation Subsystem (DIMES), amit 24 km magasban kapcsolt be a radar és 3 képet készített a talajról 4 másodperces időközzel. A képek alapján a rendszer meg tudta állapítani a leszállóegység vízszintes sebességet. Ha ez túl nagy, mert például erősen fúj a szél, a Transverse Impulse Rocket System (TIRS) nevű rendszer a fúvókái segítségével tudta kompenzálni a vízszintes irányú kitérést a kijelölt leszállóhely elérése érdekében. A leszállóegységhez felülről az áramvonalas burkolat, alulról pedig a hő pajzs csatlakozott. A leszállóegység és a rover út közbeni energiaellátásáért pedig a 2,65 méter átmérőjű és 243 kg-os tömegű utazófokozat felelt. Az összeszerelt űrszonda teljes tömege 1063 kg volt. Az utazófokozat két antenna segítségével kommunikált az irányító központtal Marsig tartó út alatt. Ezek közül az egyik egy kisnyereségű omnidirekcionális antenna, a másik pedig egy közepes nyereségű irányított antenna volt. Mindkét rovert egy-egy háromfokozatú Delta II Heavy hordozórakétával tervezték indítani a floridai Cape Canaveral-nál lévő Kennedy Űrközpontból. A hordozórakéta második fokozata alacsony Föld körüli parkoló pályára juttatja majd a harmadik fokozatot és az űrszondát. Innen pedig a harmadik fokozat mintegy másfél perces gyújtásával indítják el az űrszondát a Mars felé. Az út során az űrszondákat felpörgetik egy megadott fordulatszámra a stabil repülés érdekében. Ahogy a két jármű kezdett testet ölteni a JPL-ben, a több mint százfős NASA szakemberekből álló bizottság hozzálátott a két leszállóhely kiválasztásának. A bolygó körül keringő Mars Global Surveyor és Mars Odyssey űrszondák fényképei alapján 155 jelöltet vizsgáltak meg. A cél olyan területek kiválasztása volt, amik megfelelően biztonságosak (kellően sima a terep, kevés a kő és szikla a felszínen, valamint nincsenek veszélyes lejtők és a szállópor-koncentráció alacsony) és korábban nedves környezet lehetett. A MER-A rover leszállási zónájának a marsi egyenlítőtől délre fekvő Aeolis négyszögben található 166 km átmérőjű Guszev-krátert jelölték ki, amelyben korábban a szakemberek sejtése szerint egy folyékony vizet tartalmazó tó lehetett. A MER-B rover leszállóhelyének pedig az egyenlítőtől szintén délre fekvő Meridiani Planum alföldet választották. Az alföldről a Mars Global Surveyor által készített ásványi anyagokat beazonosító felvételek egy hatalmas, szürke hematittal borított területet mutattak. Ez az ásvány pedig általában folyékony víz környezetében keletkezik.

A Spirit és szállító űrszondája a Delta II Heavy hordozórakéta tetején elstartol a Kennedy Űrközpont 17A
indítóállásából 2003. június 10-én.
Forrás: The Planetary Society

Az Opportunity fellövése a 17B indítóállásból 2003. július 8-án hajnalban.
Forrás: NASA Mars Exploration Program
A roverek neveit a Sojourner-hez hasonlóan egy diákok körében meghirdetett esszépályázat alapján, majdnem 10 000 beküldött esszé közül választották ki. A győztes esszét az arizonai Scottsdale-ben élő 9 éves Sofi Collis írta meg, amely alapján a Mars Exploration Rover-A a Spirit, a Mars Exploration Rover-B pedig az Opportunity nevet kapta. Emellett, mint ahogyan az előző missziónál, a leszállóegységek is külön nevet kaptak a landolás után. A korábbi két űrrepülőgép katasztrófa során elhunyt NASA űrhajósokra emlékezve a Spirit leszállóegysége a Columbia Emlékállomás, az Opportunity-é a Challenger Emlékállomás nevet kapta. Elsőként a Spirit készült el, így ő rajta tesztelték a berendezések, műszerek működését és ez azt is jelentette, hogy rengeteg probléma volt vele a fejlesztés alatt. Az Opportunity elkészítésekor már tanultak ezekből a hibákból, így a második járművel sokkal kevesebb probléma volt. 2003 elején a két rover és űrszondáik elemei is megérkeztek a floridai Kennedy Űrközpontba, ahol a végső szerelés és tesztelés után behelyezték őket a két Delta II Heavy hordozórakéta orrkúpjai alá. A Spirit indult elsőként 2003. június 10-én 17:58:47-kor (világidő) a 17A indítóállásból. Az őt követő Opportunity szigetelésjavítás miatt több napos késéssel július 8-án 3:18:15-kor (világidő) emelkedett fel a 17B indítóállásból. A Mars felé vezető úton a Spirit-et szállító űrszonda négy, az Opportunity-t szállító pedig három alkalommal hajtott végre pályakorrekciós manővert. Az utazás során egy nagyerősségű napkitörés érte el az űrszondákat, ezért a roverek vezérlő-számítógépeit újraindították, annak érdekében, hogy a napkitörés ne okozzon károsodást a memóriában. A Marshoz érkezés előtt 45 nappal kezdődött meg a leszállás előkészítése. A Spirit 487 millió kilométer megtétele után 2004. január 4-én érte el a Marsot. 15 perccel a légkörbe lépés előtt levált az utazófokozat. 125 km magasban a leszállóegység előre néző hő pajzzsal és körülbelül 5,4 km/s sebességgel lépett be a Mars légkörébe. A következő négy perc során a légköri súrlódás a sebesség 90 %-át felemésztette, majd 12 km magasságban kinyíltak az ejtőernyők. 20 másodperccel az ernyők nyitása után levált a hő pajzs és a leszállóegységet egy kötélen lelógatták az áramvonalas burkolatból. Az utolsó fél percben beindult a DIMES rendszer és feltérképezte a felszín közelében lévő szélviszonyokat. 355 méter magasságban és nyolc másodperccel a becsapódás előtt gázgenerátorok felfújták a légzsákokat. Százötven méterrel a talaj felett beindultak a fékezőrakéták, a TIRS rendszer pedig kompenzálta a szél erejét. Végül 15 méteres magasságban nullára csökken a sebesség, eloldott a kötél, ami eddig a leszállóegységet az áramvonalas burkolathoz kötötte és a leszállóegység a továbbiakban szabadon zuhant a felszín felé. Január 4-én 4:26-kor (világidő) 14 m/s sebességgel a leszállóegység és a Spirit talajt ért a Guszev-kráterben, 13,4 kilométerre az eredetileg kijelölt ponttól. Az első becsapódás után a leszállóegység még 28-szor pattant vissza a talajról, majd 250 – 300 méter múlva a déli szélesség 14,57° keleti hosszúság 175,47° koordinátájú ponton állapodott meg.
A landolás mindegyik fázisa a tervek szerint zajlott és a rover folyamatosan sugározott adatokat annak érdekében, hogy a leszállást végig követni tudják az irányító központ munkatársai. A leszállás után kezdetét vette a ballonok leeresztése, amely nagyjából 50 percig tartott, majd kinyíltak a leszállóegység háromszög alakú lapjai és a Spirit napelemei megkezdték az akkumulátorok feltöltését. Az elkövetkező napokban tesztelték a tudományos műszerek működését, a rover eddig összehajtott állapotban lévő kerekeit pedig szétnyitották normál helyzetbe. Kihajtották a kameraállványt és a navigációs kamerák elkészítették az első képeket a roverről, a leszálló egységről valamint az őket körülvevő leszállási zónáról. Az első panorámaképeken egy vörösesbarna színű, porral és kisebb sziklákkal borított síkság tárult az irányítók szeme elé, néhány kráterrel, távolban pedig egy dombvonulattal. A képek segítségével a nagyjából 300 méterre fekvő, Bonneville-nek elnevezett krátert jelölték ki a rover első állomásának. A távolabbi dombvonulat, mint távlati cél, szintén felkerült a megvizsgálandó célpontok listájára, bár a távolsága kérdésesé tette az elérését. A dombvonulatot a 2003-ban történt Columbia űrrepülőgép katasztrófájának áldozataira emlékezve Columbia-domboknak nevezték el. A hét csúcs az elhunyt űrhajósokra elékezve az Anderson-, Brown-, Chawla-, Clark-, Husband-, McCool- és Ramon-domb nevet kapták. Végül elérkezett az ideje annak, hogy a Spirit a felszínre gördüljön. Ehhez először a rovert a leszállóegységekhez rögzítő mechanikus elemeket piropatronokkal leválasztották. A Spirit-nek három rámpa állt a rendelkezésére, kettőt ezek közül azonban a félig még felfújt leszállási légzsákok eltorlaszoltak. Az irányító központ megpróbálta a panelek felemelésével és újbóli kinyitásával kipréselni a maradék levegőt a légzsákokból, ez azonban nem járt számottevő sikerrel, ezért a misszió 11. napján a Spirit-et saját tengelye körül az óramutató járásával megfelelően 115°-kal elforgatták, majd a legszabadabb rámpán január 15-én legördültek vele a talajra. Másnap a Spirit kinyújtotta robotkarját és elkészítette az első mikroszkopikus felvételeket és színképelemzéseket. Legelőször is a leszállóhelyet borító rozsdabarna marsi port vizsgálták meg, amely rögtön meglepő eredményekre vezetett. A por ugyanis összecementálódott szerkezetű volt, amelynek belsejében különféle lyukak és hézagok helyezkedtek el. Ennek ellenére a felülete keménynek bizonyult. A port a Mössbauer spektrométerrel megvizsgálva abban háromféle vastartalmú ásványt mutattak ki, amelyek közül az egyiket a Földön is előforduló olivinként sikerült azonosítani. Az olivin olyan ásvány, amely a vulkanikus magma kristályosodásakor jön létre. A por APXS spektrométerrel történő vizsgálata kimutatta, hogy vasat, szilíciumot, ként, cinket és nikkelt tartalmaz, az utóbbi két elemet ekkor sikerült először azonosítani a Marson. Ezután a Spirit megközelítette az első kővizsgálati célpontját, az Adirondack névre keresztelt kúpos alakú sziklát. Ennél a sziklánál kívánták tesztelni a kőtörő fúró berendezés működését. A 18. marsi napon, január 21-én, azonban a Spirit nem várt módon vész üzemmódra kapcsolt és csak gyenge jeleket kezdett küldeni a Föld felé. Az irányító központ folyamatosan próbálta újra felvenni a kapcsolatot a járművel, ami végül január 23-án sikerült ismét. Ekkor derült ki, hogy a tudományos műszerek adatainak tárolására szolgáló flash memória túltöltődése miatt a Spirit vezérlő számítógépe három napon keresztül több mint hatvanszor indította újra a rover rendszereit. Az irányító központ munkatársinak sikerült úrrá lenniük a problémán azáltal, hogy megtiltották a memória további teljes feltöltését és ezzel a rover állapota stabilizálódott. Ezután a Spirit elküldte a Földre az Adirondack szikla színképelemzését, majd neki látott a sziklafelület letisztításának és a fúrásnak. A kapott adatok alapján az Adirondack vulkanikus bazaltnak adódott, amely sok olivint tartalmaz. Ezután a Spirit megindult az első nagyobb állomása, a nagyjából 300 méterre lévő, 200 méter átmérőjű Boneville-kráter felé.
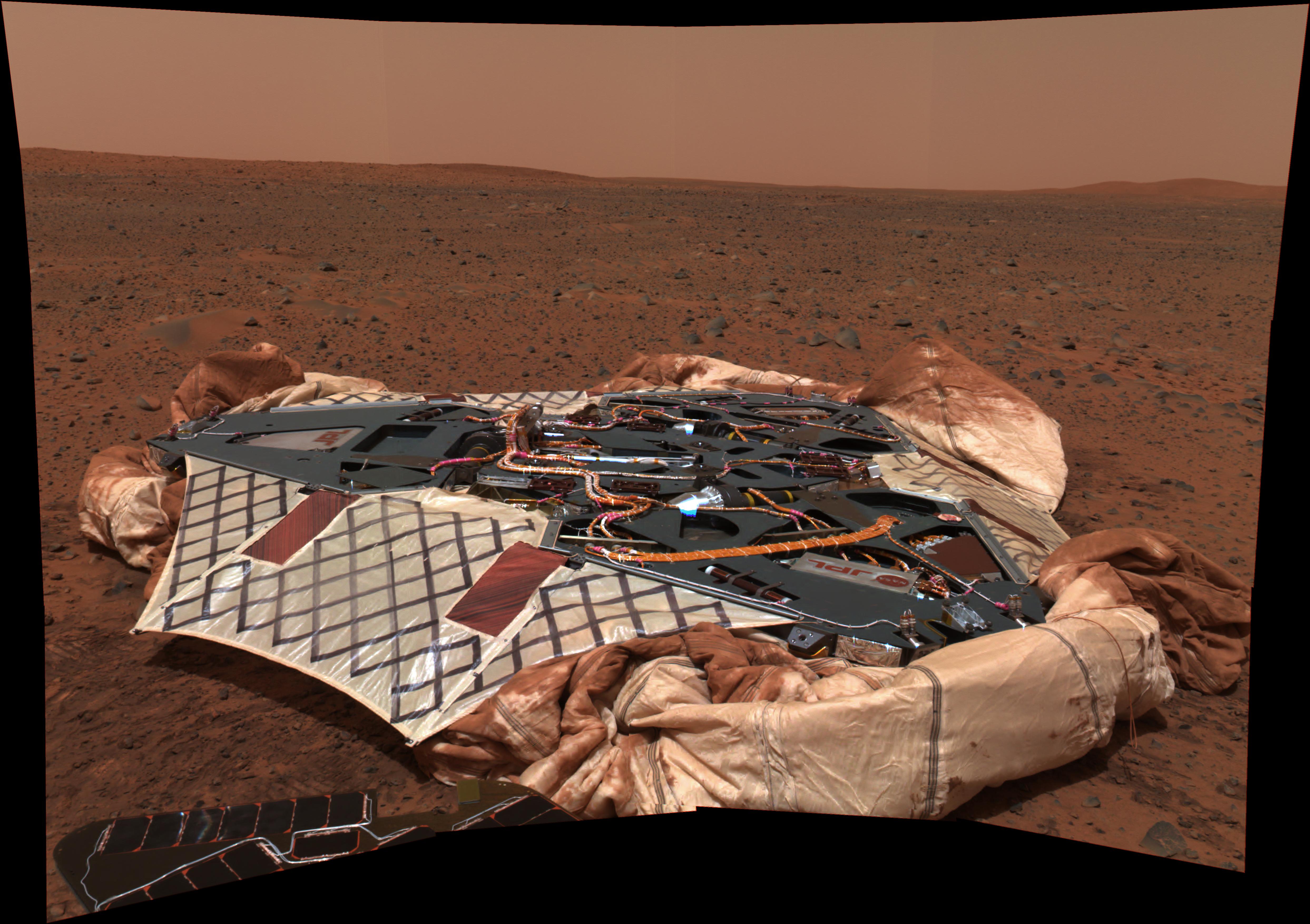
Mozaik kép a Spirit elhagyott leszállóegységéről. A jobb szélen a Columbia-dombok láthatóak.
Forrás: NASA Mars Exploration Program

Hamis színes felvétel a Columbia hegyek lábáról, amelyet a Spirit a 125. solon rögzített.
Forrás: NASA Mars Exploration Program
2004. január 25-én 456 millió kilométer repülés után az Opportunity is sikeresen elérte a marsi felszínt. Testvéréhez hasonló folyamatú leszállás után az Opportunity leszállóegysége 4:54-kor (világidő) csapódott be a Mars felszínébe. A leszállóegység még 26-szor visszapattant, majd a déli szélesség 1.95° keleti hosszúság 354.47° koordinátájú ponton állapodott meg egy 22 méter átmérőjű, 2-3 méter mély kráterben, amelyet nem hivatalosan Eagle-kráternek neveztek el. A kráter alját laza, finomszerkezetű homok borította az északi pereménél pedig világosabb színű sziklák törték át a homokréteget. Az Opportunity-t a Spirit-hez képest sikerült rövidebb idő alatt beüzemelni. Az első hét sol során a jármű fényképeket, talajvizsgálati méréseket és mini-TES hő színképeket készített, majd január 31-én (7. sol) legördült a leszállóegységről és a következő három solon a leszállóegység körüli talajt vizsgálta. Már az első néhány sol során kiderült, hogy a robotkar éjszakai fűtéséről gondoskodó berendezés kikapcsolásával gondok adódtak, a fűtés nem állt le akkor, amikor kellett volna. A fűtő általában marsi idő szerint este 7:30-kor kapcsolt be és reggel nyolc óráig működött folyamatosan, ezalatt pedig a robotkarban lévő mozgató aktuátorok a nominális hőmérsékletüknél jobban felmelegedtek. Az Opportunity addig nem tudott mozogni, ameddig az aktuátorok le nem hűltek a nominális hőmérsékletükre, ez általában marsi idő szerint 11:30-kor következett be. Ráadásul a robotkarral történő vizsgálatok befejezése és a továbbhaladás előtt a robotkart mindig vissza kellett hajtani eredeti pozíciójába. Ez és a robotkar fűtésére eső többlet energia miatt a Spirit-hez képest az Opportunity mozgására sokkal kevesebb idő és energia jutott solonként. A 11. napon a Mössbauer spektrométeres mérés megállapította, hogy a talaj olivint és további két másik vastartalmú ásványt is tartalmaz. A mérések alapján a vastartalmú ásványok arányai eltértek a Guszev-kráterbeli eloszlástól. A 12. solon egy tesztút következett és a 13. solon pedig az Opportunity elindult a kráterperem felé. A leszállóegység és az egész kráter környékét kis törmelékalakzatok borították, amelyek között sok volt a legömbölyített alakú úgynevezett szferula. Ezek a szürke színű gömböcskék úgy helyezkedtek el a sziklákban, mint mazsola a süteményekben. A szferulák a talajt is beborították, ebből arra következtettek a szakemberek, hogy valószínűleg a szél koptatóhatásának folyományaként kerültek ki a puhább sziklákból és szóródtak szét a talajon. A spektrométerekkel történt mérések megállapították, hogy a szferulák hematitot (vörösvasérc) tartalmaznak. A 14. solig a jármű 3,5 métert haladt a fehér sziklák irányába és közben a spektrométerekkel és mikroszkópos képalkotóval vizsgálta a szferulákat. Méretük a néhány tizedmillimétertől a néhány milliméterig terjed. Február 9-én (15. sol) az Opportunity a világos kövek szélénél egy Opportunity Lodge-nak elnevezett helyen elért és megvizsgált egy repedezett, réteges szerkezetű, kettéhasadt sziklát, amit az irányító csapat Snout-nak nevezett el. A összetétel vizsgálat kimutatta, hogy a Snout meglepően sok ként tartalmaz. A szikla rétegeinek külső széle fényesen csillogott. A 16. és 18. sol között az Opportunity folyamatosan 2 - 3 métert haladt és meg-megállva vizsgálta az aljazat kőzetet. A kráterperemen lévő sziklakibúvások szulfátokban gazdagnak bizonyultak, ami azt sugallta, hogy egykoron a kráterperem vízben állhatott. A mikroszkópos képalkotó pedig olyan rétegeket talált a sziklákban, amik azt jelezték, hogy a sziklák folyóvíz által lerakott hordalékból formálódtak egykoron. A rover a kőpárkány El Capitan nevű régiójában két kőtömböt, a McKittrick és a Guadalupe nevű tömböket is megvizsgálta a Mösbauer spektrométerrel és az APXS spektrométerrel, majd lecsiszolta a felületüket és ismét anyagvizsgálatot végzett. A vizsgálati eredmények igen nagy kén- és bórtartalmat jeleztek a környező homokhoz képest. A sziklakibúvásoknál végzett Mössbauer színképelemzés megállapította, hogy az aljzat kőzet fő összetevője egy különleges vastartalmú ásvány, a jarozit. A jarozit réteges szerkezetű, szferulákat is tartalmazó, szulfát sóból álló vasásvány, ami hidroxilgyököket is tartalmaz. A Földön a jarozit és a szferulákat borító hematit réteg egyaránt vizes környezetben alakul ki, ez pedig újabb bizonyítékot jelentett az egykor itt lévő folyékony víz létezésével kapcsolatban. Az Eagle-kráterben végzett mini-TES mérések megállapították, hogy a kráter oldalán és alján sok hematit található. A leszállás során a pattogó ballonok becsapódásai sok helyen elsodorták a legfelső porréteget a talajról, ezeken a helyeken lényegesen kevesebb hematit tartalmat mértek. A leszállóhelyet körbevevő lapos és egyszínű táj kissé megzavarta a HAZCAM kamerarendszer működését, az egyszínű környezetben nehezen ment a sztereó képpárok összeegyeztetése, ezért a nagyobb méretű képek és az analizálás tömörítési rátáját csökkenteni kellett. A rover az Eagle-kráterben töltött időszakban elsősorban a kerekei által megtett elfordulásokból kalkulálta ki a pozícióját. Ez egészen addig jól működött, ameddig a kerekek tisztán gördültek és nem csúsztak. Csúszás esetén ugyanis ez a módszer már nem adott pontos értéket. A mozgásokat főleg blind drive módban végezték, hogy minél kisebb időveszteséggel járjanak, így azonban nem volt túl pontos a jármű helymeghatározása. Az első tudományos célpontok a kráter falon helyezkedtek el, ami miatt a rover mindig lejtőn állva fejezte be a solját. Innen a következő pozícióba V vagy U alakú mozgással, előbb tolatva, majd ismét előrefelé haladva jutott el. A 19. solon tesztelték a VisOdom rendszer működését, majd a 36.-ik, a 40.-ik és a 45.-ik sol során élesben is használták, amely alatt tökéletesen működött. Majdnem két hónap Eagle-kráterben töltött idő után az irányító csapat úgy döntött elindítja a rovert a következő célpont, a nagyjából 700 méterre lévő Endurance-kráter felé. Mielőtt elindult volna a kráter felé, az Opportunity kerekével árkot ásott a talajba.
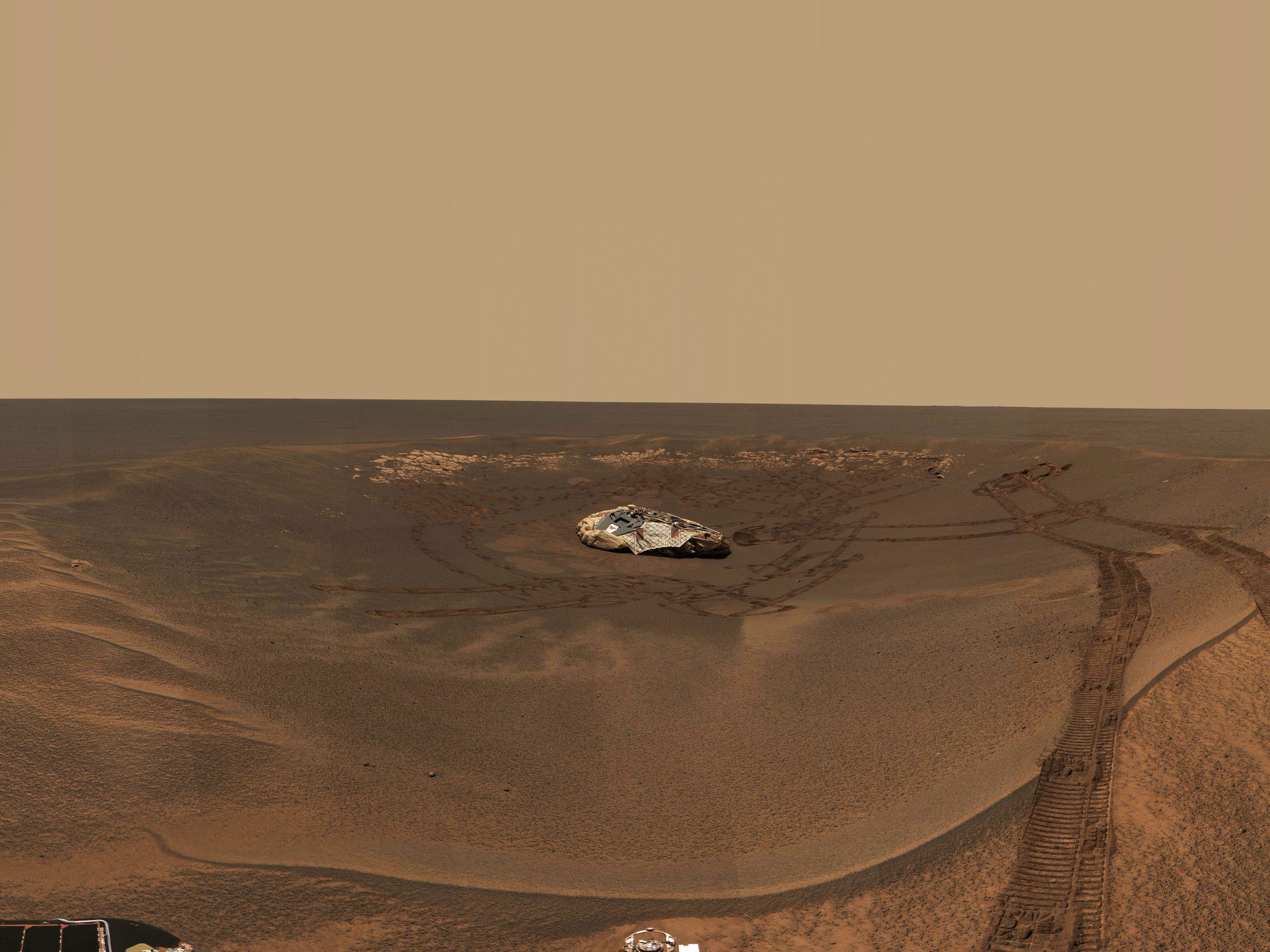
Az Eagle-kráter, amiben az Opportunity földet ért, középen a rover leszállóegységével.
Forrás: NASA Mars Exploration Program
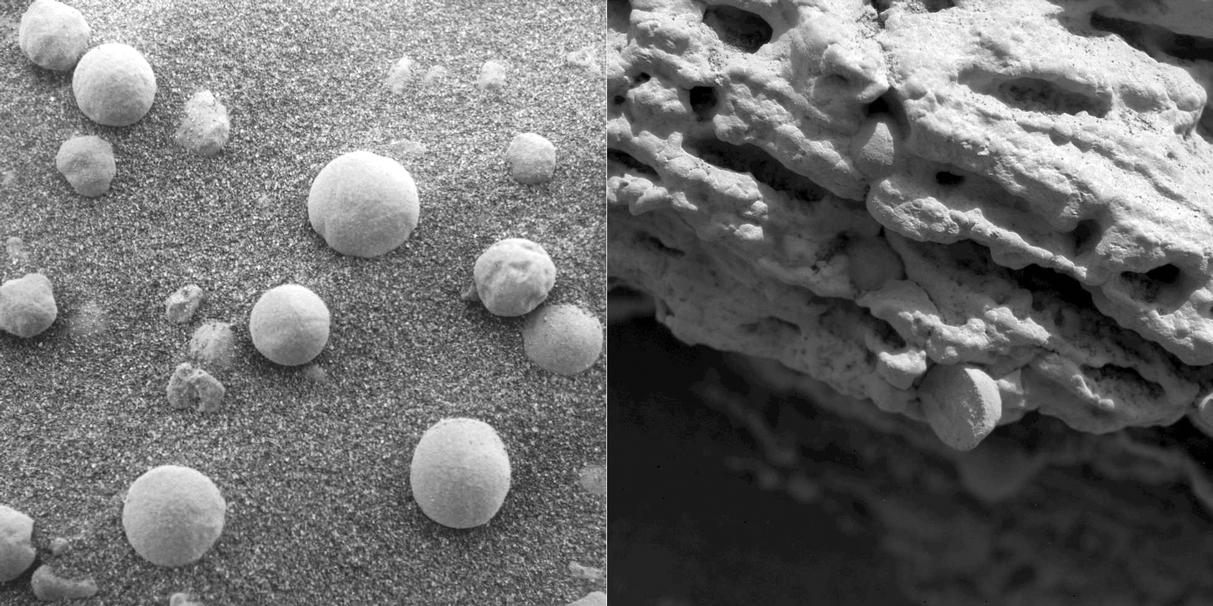
Az Opportunity által észlelt szferulák, ahogy a talajon megtalálhatóak voltak (bal oldali kép) és ahogy a sziklarétegekben elhelyezkedtek
(jobb oldali kép).
Forrás: NASA Mars Exploration Program

Panoráma az Eagle-kráter közepéről. (Külön lapon megnyitva a kép tovább nagyítható.)
Forrás: NASA Mars Exploration Program
Miközben az Opportunity az Eagle-krátert tanulmányozta a Spirit által naponta megtett távolság egyre növekedett. A 36. solon 6,4 métert, a 37.-en 21,2 métert, a 39.-en pedig már 24,4 métert tett meg a rover. Eközben időnként megállt, fényképeket, mikroszkópos fényképeket és spektrométeres meréseket készített. A 40. napon a Mimi nevű réteges kövecske környékén talált egy érdekes félgömb alakú lyukat. Az első időkben az AutoNav üzemmód túl érzékeny volt, a sík és lejtős területek határát automatikusan veszélyesnek érzékelte. A Marsig való repülés alatt feltöltöttek ugyan egy frissítést a roverekre, ami ezt kompenzálja, azonban az első három hónap alatt az eredeti szoftvert használták. A Boneville-kráterig vezető út szerencsére elég sima volt, így a Spirit az út nagy részében a blind drive módban haladhatott. A Laguna Hollow nevű helyen elkészült az első kerék által ásott árok. A Spirit 5-10 cm mély árkot ásott az egyik első kerekéve, majd több napon keresztül vizsgálta a kibukkanó altalajt. A kráterig vezető út közben több másik szikla mellett megvizsgálta a Humphrey nevű sziklát is. A rover 32 nap után a 68. solon (március 13.) érte el a Boneville-kráter peremét. A kráterperem megmászásához először a blind drive módot használták, majd az AutoNav módra váltottak át. A szakemberek ebben a kráterben is olyan világos színű kőzet kibukkanásokra számítottak, mint az Opportunity leszállóhelyén. Ezzel szemben a kráter feneke porral és homokdűnékkel takart volt. Így a Spirit nem ment le a kráterbe, hanem annak peremén halad tovább és a 100. sol után elindult a délkelet felé lévő Columbia-dombok felé. Eközben a jármű elérte a tervezett 90 solos élettartamát, de mivel tökéletes állapotban volt a misszióját automatikusan meghosszabították. A Spirit első száz solja során ötször került sor anyagvizsgálatra: a Laguna Hollow pormezőnél, a Humphrey-kőnél, a Serpent-porhordaléknál, a Mazatzal-kőnél és Rout 66-kőnél. Továbbá három helyen került sor a kövek lecsiszolására, ezek közül az egyik a Mazatzal-kőnél történt. Az elporlasztott kőpor kékes tónusúnak bizonyult, ami jelentősen eltér az Opportunity által vizsgált kövek vöröses-rozsdabarna színétől. A Mössbauer spektrométer és az APXS spektrométer vizsgálatainak eredménye szerint a kövek az Adirondack-hoz hasonló olivines bazaltból épülnek fel. A Mazatzal-kő másodszori, 6 mm mélységű megfúrása után készült fényképeken egy girbegurba fehér csíkot lehetet látni, amiből a szakemberek arra következtettek, hogy a kő kialakulásakor vizes környezetben lehetett. A Spirit emellett több helyen vizsgálta a talajt borító port és megállapította, hogy a vörös púderszerű felső réteg alatt kékes-szürke színű, bazaltos por található. Ezt a bazaltos port jól lehetett tömöríteni, azaz nagy volt a viszkozitása. Benne olyan kis kavicsszerű képződményeket, szferulákat találtak a Spirit kamerái, mint amiket az Opportunity is észlelt a Meridiani Planum-on. Az itt talált szferulák összetétele is a hematithoz volt hasonló. APXS mérések eredményei magas klór- és brómtartalmat észleletek a talajban. Ez arra utal, hogy az egykoron itt lévő, idővel kiszáradó tengerből sók rakódhattak le a kőzetekben.
Miközben a Spirit elérte és megvizsgálta a Bonneville-krátert, testvére az 57. solján (március 22.) elhagyta az Eagle-krátert és a 61. - 94. solja között átszelte az Eagle és az Endurance-krátereket elválasztó síkságot, ami annyira egyhangú volt, hogy a VisOdom és a Hazcam rendszerek nehezen adaptálódtak a környezethez. Haladási iránya mentén mindenfelé homokdűnék és szferulák terültek el. A beragadt robotkar fűtés ellensúlyozására feltöltöttek egy szoftverfrissítést a járműre, ami éjszakára megengedte az akkumulátorok lekapcsolását a hálózatról. Továbbá bevezették azt a protokollt, hogy a rover csak akkor ébredt fel reggel, amikor Nap már elég magasan járt. A 64. solon (március 30.) az Opportunity az egyik ballon becsapódásánál megvizsgált egy 40 cm-es követ, amit Bounce-nak neveztek el. A Mössbauer spektrométer vizsgálata alapján a szürkés kő összetétele hasonló volt, mint az 1865-ben Indiában talált Shergotty meteorité, ezért a Bounce anyagát shergotitnek nevezték el. Április 26-án az Opportunity is elérte és túl is szárnyalta tervezett 90 solos élettartamát. Ezen az időszak alatt az irányítók a blind drive üzemmódot használták a legtöbbet, egészen addig, amíg azt a terep megengedte. Az Endurance-kráter felé haladva egyre több olyan mélyedést figyelt meg, amelyek peremén látható volt a világos színű rétegzett kőzet kibúvása. Később ezek a mélyedések egy árkokká olvadtak össze. Az egyik ilyen árkot Anatóliai-ároknak nevezték el. A képződmények nagyon hasonlóak voltak a földi karsztvidékek árkaihoz. Útban az Endurance-kráter felé a rover megvizsgálta a 9 m átmérőjű Fram-krátert is. Eközben a Spirit folyamatosan haladt a Columbia-dombok felé. Útközben frissítették a járművek repülési szoftvereit, ettől kezdve az AutoNav nem vette akadálynak a lejtők szögének megváltozását. További változás volt az is, hogy sima terepen a veszélyelkerülő rendszer nem készített folyamatosan újabb fényképeket, hanem a meglévőkre hagyatkozott, így a processzor kisebb igénybevétele gyorsabb haladást tett lehetővé. Naponta 1,5-2,5 óra adódott vezetésre és négynaponta egyszer került sor a robotkarral történő vizsgálatokra. A Bonneville-kráter északi szélén feltűnt a Spirit leszállóegységének hő pajzsa. A solonként megtett távolságok továbbra is növekedtek, a 125. solon rekordot jelentő 124 métert tett meg a rover, a 133. solon pedig 79 métert haladt folyamatosan AutoNav módban, ami szintén rekordnak számított. Az út során néhány kitérőre került sor. Az első a Missoula-kráterhez történt, amelynek peremét a 105. solon érte el a Spirit. A 120. solon a jármű megérkezett a Lahontan-kráterhez, ahol egy ismeretlen hiba miatt számos hibás mozgássort hajtott végre a rover, mielőtt elérte a célpontját. Később kiderült, hogy a hibát a magasság különbség okozta a célpont és a nemrég definiált lokális koordinátarendszer között. Június 11-én, 10 hét és több mint 3 km gördülés után a Spirit elérte a Columbia-dombok lábát. A West Spur nevű terület gazdag volt a különféle sziklákban. Június 14-én egy furcsa formájú kőre lett figyelmes a rover kamerája. A nagyjából 10 cm Pot of Gold elnevezésű kőből girbegurba nyúlványok álltak ki, amelyeknek lekerekített gömbszerű végük volt. Mikroszkóp alatt nézve formájuk nagyon hasonlított a lösz konkréciókra, azaz löszbabákra. A spektroszkópos elemzések alapján megállapították, hogy a Pot of Gold-kő jelentős hematit tartalommal rendelkezik. A kő vizsgálat több solig tartott, mert a 13°-os lejtőn kerekek csúszás miatt sokáig nem sikerült megfelelően pozícionálni a rovert. A körülbelül 90 m magas Husband-domb lábánál végzett ásás színképelemzése arra utalt, hogy ott valamikor sós víz is lehetett. A talajon 50-100 cm magas dombocskák jelentek meg, a 154. solon pedig a jobb első kerék áramfelvétele a többi kerékhez képest a duplájára növekedett. A 155. solon a dőlésszög érzékelő 22 °-nál megállította járművet, amikor az megpróbálta megmászni az egyik dombot, ezért másnaptól kezdve a dőlésszög érzékelő érzékenységét visszább vették. A Pot of Gold tanulmányozása után a Spirit az Engineering Flats-nak elkeresztelt lapos néhány méterre lévő terültre hajtott. Itt tesztelték a jármű VisOdom szoftverét, valamint néhány rövidebb lassú menet során vizsgálták a jobb első kerék állapotát is. Két sol során fűtötték a kereket a beépített fűtőberendezésével, hátha ettől a kenőanyag a hullámhajtóműben egyenletesebben oszlik majd el. Ezután újabb teszt utak következtek, de nem sikerült javítani a kerék állapotán és a probléma forrását sem sikerült megtalálni. Az irányító csapat tagjai a jármű fényképeit elemezve találtak egy ígéretes sziklakibúvást a dombvonulat délnyugati oldalában, mivel azonban közeledett a tél a déli féltekén a Spirit-nek az északi oldalon kellett maradnia a napenergia legjobb kihasználásához, így lemondtak a sziklakibúvás megközelítéséről. A továbbiakban Columbia-dombok északi oldalán mászva a jármű áttért az ötkerekű hajtásra, a jobb első kerék használatát pedig minimalizálták. A járműnek hátrafelé kellett haladnia maga után húzva a használhatatlan kereket. A helyben megfordulás ezzel kivitelezhetetlenné vált. Több nap hátrafelé haladás után a Spirit elérte egy olyan részt, ahol a lejtő több mint 10°-os volt, amit öt kerékkel már nem tudott megmászni a jármű. Emiatt vissza kellett térni a hatkerekű hajtásra. A 203. solon egy Clovis nevű sziklakibúvás közelében a Spirit a kibúvás helyett egy délre néző üregbe jutott, ahol a csúszás elérte a 100 %-ot, a lejtőszög pedig 30°-ot. A jármű öt napig küzdött a Clovis tetejére való feljutással. Amint elérte sziklakibúvást intenzív tudományos munka vette kezdetét, amely során a rover hidroxilt tartalmazó goetit vasásványt talált a sziklában, majd a jármű folytatta a felfelé mászást a Husband-domb csúcsára.
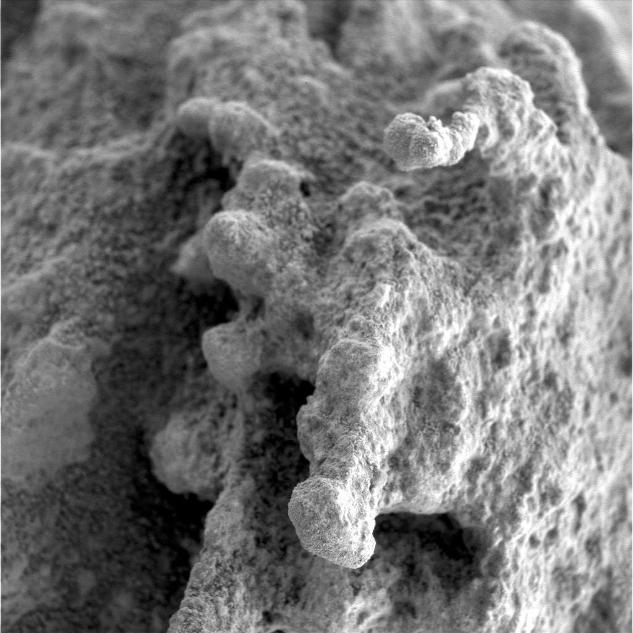
A Pot of Gold lösz konkréció szerű képződményei.
Forrás: NASA Mars Exploration Program
Április végén, a 95. solján az Opportunity elérte az Endurance-kráter peremét és hosszas megfontolás után az irányítók engedélyezték neki, hogy leereszkedjen a kráterbe. Az Endurance-kráter nagyjából 150 méter átmérőjű és 20 méter mély. Peremét sziklakibúvások, alját pedig fodrozódó homok borítja. A kráter oldalfalai 25-40 fokos dőlésszögűek, ami helyenként meghaladta a rover előzetes tervezési kritériumait. Az Opportunity először a perem délkeleti részén lévő Lion-követ vizsgálta meg, majd a perem mentén elindulva, a leereszkedéshez alkalmas pontot keresve átlagosan 40 m haladt solonként. A rover a perem egyharmadát körbejárta, végül az irányító csapat a Lion-kőtől keletre, 6 méterre lévő lejtőt találta a legbiztonságosabbnak a leereszkedéshez. A 25°-os sziklás lejtő jó tapadást és biztonságos haladást kínált. A földi gyakorló roverrel kipróbálták, hogy vissza tud-e mászni a jármű ilyen meredek falon. A próba sikerült, így következhetett az igazi akció. A leereszkedés nagyon óvatosan kezdődött meg. A 134. solon (június 9.) az Opportunity előbb csak első kerekeivel, majd mind a hat kerekével négy méter gördült lefelé a kráterperemen, majd problémamentesen visszamászott 1,5 métert. Ezzel a lejtő csúszását ellenőrizték. A sikeres tesztet követően a jármű 2 m/sol sebességgel kezdett ereszkedni a lejtőn és közben a sziklakibúvásokat vizsgálta. A leereszkedés alatt a jármű folyamatosan használta a VisOdom rendszert, ami pontos pozíció adatokat biztosított. 1,3 méter ereszkedés után az Opportunity megállt és egy Tennessee-nek elnevezett lapos követ két helyen is megfúrt. A kráter fenekét elérve több mikroszkópos közelképet is készített a kráterben talált üledékes, jarazitos kőzetre nagyon hasonlító, Endurance-kövekről. A kövek felszínén és belsejükben sok szferula volt látható. Az Endurance-kráter oldalán lévő kőzetréteg tízszer olyan vastagnak bizonyult, mint az Eagle-kráterben lévő kőzetréteg. Meridiani Planum 200 méter mély üledéktakaróhoz képest azonban mindkét kráter kőzetrétegei vékonyak. A fúrások eredményei alapján megállapították, hogy lefelé haladva az egyre idősödő kőzetrétegekben a magnézium és a kén összetétele változatlan, a klór tartalom viszont folyamatosan nő. A következő tudományos célpont, a Burns Cliff felé vezető úton a jármű megvizsgált egy Wopmay nevű érdekes sziklát, amit még a peremről szúrtak ki az irányító csapat tagjai korábban. A Wopmay amely magasabb volt, mint maga a jármű nagy óvatosságot igényelt. Vizsgálata után tőle távolodva a rover oldalra csúszott egy eltemetett sziklalapon, ami akár veszélyes is lehetett volna, ha a veszélyelkerülő rendszer nem állítja meg időben a mozgást a jármű hozzáütötte volna a napelemeit a Wopmay-sziklának. A Burns Cliff-et elérve újabb vizsgálat következett a robotkarral. 2004 szeptemberében a Föld és a Mars a Nap két átellenes oldalán helyezkedett el és a kommunikáció a roverekkel a Nap zavaró hatása miatt nem volt biztonságos. Ilyen együtt állásra 26 havonta kerül sor. Mindkét járművet szeptember 9-e és 20-a között tartalék üzemre állították át. Ez alatt a roverek 5 percenként küldtek egy-egy jelet a Földre és válaszként a no-operation utasítás érkezett. A marsi déli féltekén szeptember 20-án elkezdődött a tél, a rovereknek pedig az eddiginél is hidegebb környezetben kellett működniük. Szintén ebben a hónapban másodjára hosszabbították meg a járművek működési időtartamát. Eddig a Spirit 3,6 km az Opportunity pedig 1,6 km tett meg. Mindkét rover továbbra is jó állapotban volt, egyedül a Spirit meghibásodott jobb első kereke okozott némi problémát a haladás során. A Spirit a 243. és a 256. solja közötti Mars-Nap-Föld együttállást a Tikal nevű helyen töltötte. Továbbhaladva a következő célpont a Machu Picchu felé, talált egy nagyjából 10 cm-es réteges sziklát, a Tetl-t és megvizsgálta azt a mikroszkópos képalkotójával és spektrométereivel. A 312. solon elérte a Machu Picchu-t. Itt az irányító csapat úgy döntött, hogy a Husband-domb direkt megközelítése a terep egyenetlensége, a meredek lejtők, nagyméretű sziklák és a hegyoldal tájolása miatt túl kockázatos, ezért a hegy északi oldalán lévő széles nyeregben (Cumberland Ridge) kelet felé indították el a Spirit-et.

Az Opportunity hő pajzsának maradványai.
Forrás: NASA Mars Exploration Program
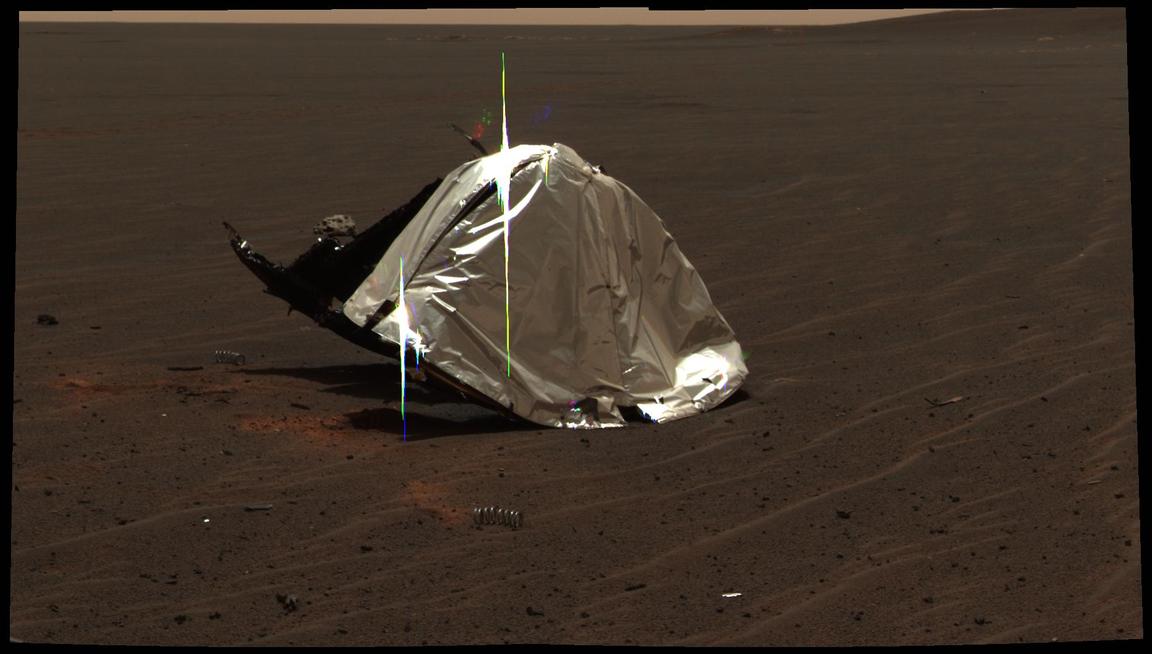
A közelebbi képen jól látszanak azok a fém alkatrészek (pl. rugók), ami miatt az iránytó csapat nem is engedte közelebb az Opportunity-t a hő pajzs roncsaihoz.
Forrás: NASA Mars Exploration Program

Panoráma az Endurance-kráterről. (Külön lapon megnyitva a kép tovább nagyítható.)
Forrás: NASA Mars Exploration Program

Homokdűnék az Endurance-kráter fenekén.
Forrás: NASA Mars Exploration Program
Az Opportunity a 295. solján befejezte az Endurance-kráter vizsgálatát és megindult arra a helyre, ahol leereszkedett a kráterbe. A 316. solján (december 15.) a rover elhagyta az Endurance-krátert és továbbhaladva keresztezte a saját korábbi nyomait. A keréknyomokban némi por rakodott le azóta, nagyjából hasonlóan ahhoz a porréteghez, ami immáron a rovert is borította. A nyomok vizsgálata után az Opportunity a leszállóegységének 200 méterre délre földet ért hő pajzsa felé vette az irányt. A hő pajzs a becsapódás hatására két darabra szakadt és a területet néhány nagyméretű rugó és egyéb alkatrész maradványaival szórta be. Az irányító csapat csak óvatosan engedte közel a rovert a hő pajzs maradványaihoz, nehogy azok megsértsék a járművet. A rover előbb megkerülte ezt a területet, majd a mikroszkopikus kamerával és a PanCam-mal megvizsgálta a pajzs maradványait, főleg a méhsejtszerű szerkezet torzulásait a megmaradt darabokon és a becsapódási krátereket, amelyeket a darabok vájtak a Mars felszínébe. Miközben a hő pajzsot vizsgálta, az Opportunity a közelben felfedezett egy meteoritot, amit Heat Shield Rock-nak, azaz pajzsmeteorit neveztek el. A spektroszkópos analízis megállapította, hogy a 15 centis meteorit főleg vasból áll. Először sikerült felfedezni meteoritot egy másik bolygó felszínén. A szenzációs lelet vizsgálata után az Opportunity elindult következő nagyobb célpontja, a délre fekvő Victoria-kráter felé. Eközben a Cumberland gerincen a Spirit 10-15 métert halad solonként. Az irányító csapat remélte, hogy a gerincen keresztül északi irányban el tudnak jutni a Husband-domb csúcsára. Az mászás a lankás, 5 - 7 °-os emelkedőknek köszönhetően könnyed volt, a jármű nagyrészt blind drive módban halad, az irányító csapat pedig hozzászokott az ötkerekű hajtáshoz. A napelemeken lévő por miatt azok továbbra is csak limitált energiát biztosítottak. Hamarosan megjavult a jobb első kerék hajtása is, amit azzal magyaráztak, hogy a hajtásnélküli időszakok és napi hőmérsékletingadozás miatt a kenőanyagnak sikerült megfelelő helyre kerülnie a hullámhajtóművön belül. Ennek köszönhetően a jármű gyorsan átszelte a nyerget, azonban a 330. solon egy programhiba miatt a rover megakadt a felfelé mászásban egy homokos területen. Ezután az irányító csapat két napon keresztül kereste a megfelelő helyet a további felfelé haladáshoz. A 343. solon a jobb hátsó kerék beleásott a laza talajba és egy burgonya nagyságú kő beszorult kerék belső felülete és a motor háza közé. Egészen a 346. solig próbálkoztak a kő kitessékelésével, rövid, 12 cm-es hátra menteket és 7°-os bal fordulókat váltogatva, míg végre sikerült tőle megválni. Egy idő után a gerincen való haladás egyre nehezebb lett. Normál esetben a járműnek 70-90 m megtételéhez 70 és 120 közötti parancsra volt szükség. Ez a szám a gerincen haladva 200 – 500 parancs nőtt miközben a megtett távolság volt a 10-15 méterre csökkent.
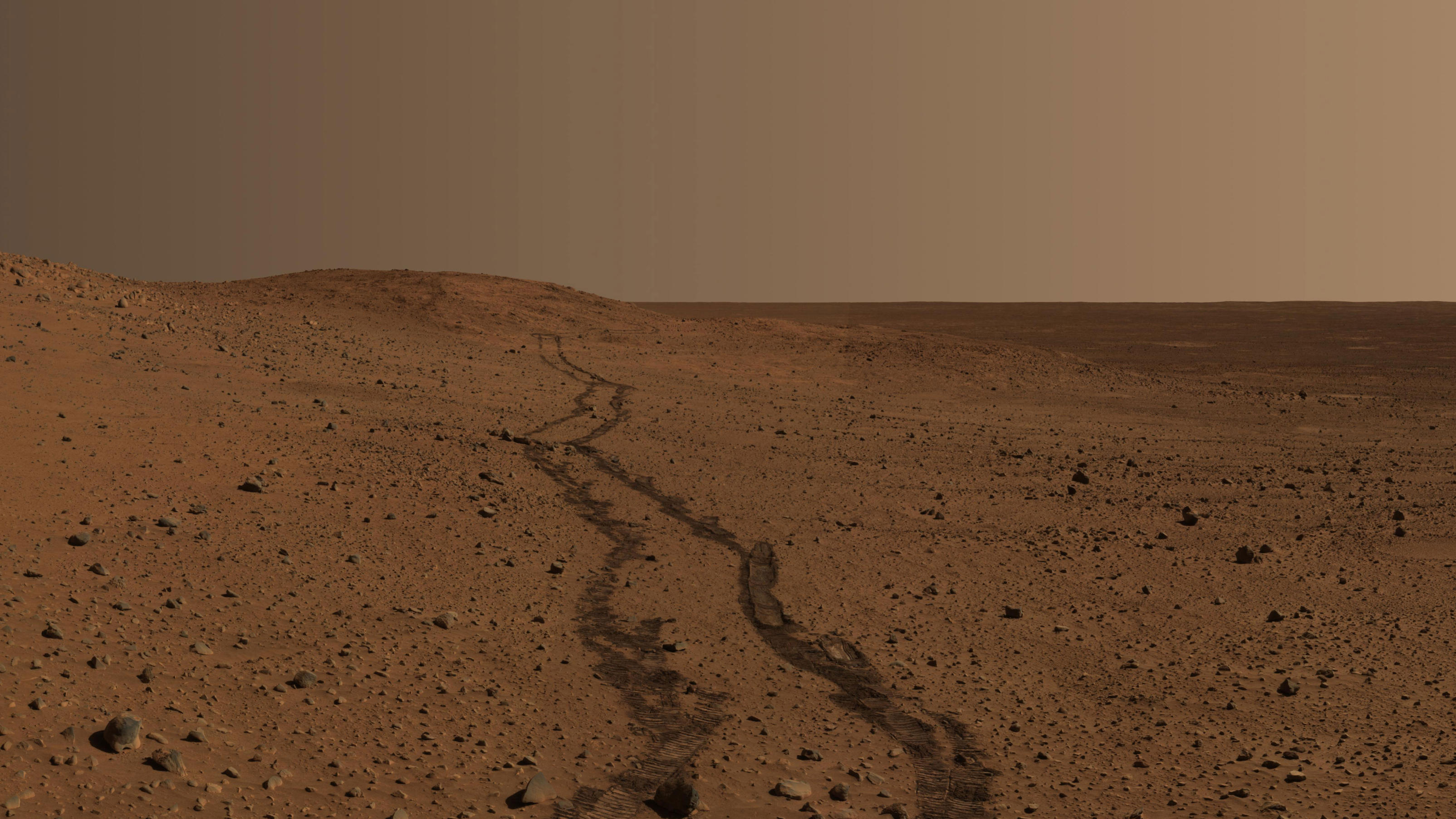
A Spirit keréknyomai a Husband-domb közelében.
Forrás: NASA Mars Exploration Program
A Purgatórium-dűne, amely majdnem az Opportunity végső nyughelyévé vált.
Forrás: NASA Mars Exploration Program

Porördög a Mars felszínén.
Forrás: NASA Mars Exploration Program

Panoráma a Husband-dombról. (Külön lapon megnyitva a kép tovább nagyítható.)
Forrás: NASA Mars Exploration Program
Miközben a Spirit a Cumberland-gerincen haladt az Opportunity a 410. solig megtette az Endurance-krátertől a Victoria-kráterig vezető, déli irányú 5 km-es út egyharmadát. Az Opportunity 150 -200 métert is megtett solonként a lapos, homokdűnékkel tarkított tájon. Útközben a jármű kisebb kráterek mellet haladt el, amik segítségével a keringő űrszondák képein jól beazonosítható volt a helyzete. 2005 márciusában a roverek vezérlő szoftvereit frissítették, az új frissítés kigyomlálta a lejtőre vonatkozó hibákat a Go to Waypoint parancsból és engedélyezte az előbbi használatát a VisOdom módban. Szintén márciusban a Spirit több porördögöt is sikeresen lefotózott (421., 456., 459. sol), az egyikük pedig olyan szerencsés irányból érkezett a 418. solon, hogy lefújta a rover napelemeire rakodott port és a szín kalibrációs teszttábla felületét. Ezáltal az egyre inkább energia szűkében lévő rover újult erővel folytatta a Guszev-kráter felfedezését. Miután a Cumberland-gerinc megmászhatatlannak bizonyult a 18 °-os emelkedők, a 25 cm-es sziklák és a laza homok miatt, a Spirit a Husband-domb nyugati oldalán indult el annak csúcsa felé. Az 535. sol környékén a rover 60 méter magasban mintegy 200 méterre volt a csúcstól és megbízhatóan halad naponta akár 20 métert is VisOdom módban. Április 26-án az Opportunity kerekei beásták a járművet egy lazább homokos talajrészen. A rover éppen egy szferulákkal és homokdűnékkel tarkított terepen haladt, amikor a kerekek előre haladás helyet elkezdtek egyre mélyebbre süllyedni a homokban. Amire az irányítás észlelte a problémát a kerekek már 15 cm-re belesüllyedtek a talajba. A rover földi másával a próbaterepen elemezték a helyzetet. A tesztek alapján a járművet arra utasította az irányító csapat, hogy 200 métert tegyen meg előre, de a kerekek a homokot maguk előtt tolva mindössze 1,5 - 2 métert vánszorogtak előre. Háromheti kínlódás után a 486. solon, június 4-én, az Opportunity végre kiszabadult a por fogságából. Mivel nem volt egészen érthető az irányítás számára, hogy mért ragadt be az Opportunity, ezért egy kerülő úton újra megközelítették vele a porcsapdát és a kameraképeken tanulmányozták a kerekek által hagyott nyomokat. A Spirit augusztusban felért a Columbia-dombok mintegy 90 méter magas csúcsára a Husband-dombra. A domb két mini csúcsának hónapokig tartó vizsgálata után a rover-t elindították egy délen lévő völgy felé, útközben pedig a Husband-domb oldalában olivinben gazdag homokot és köveket talált. A kutatók érdekesnek találták, hogy a domb északi oldalán egyáltalán nem találtak ilyen ásványokat, délen azonban gazdag lelőhely található. 2005 októberében ismét hasznosnak bizonyult a Purgatórium-dűnénél megszerzett tudás, ugyanis a 603. solon az Opportunity a tervezett 45 méter helyett mindössze 5 métert tett meg, mielőtt a kerékcsúszás érzékelő leállította a mozgást a tapadás teljes hiánya miatt. A helyzetet azonban sikerült az előző tapasztalatok alapján gyorsan orvosolni és két sol múlva a jármű már újra a megfelelő ütemben haladt. A Spirit és az Opportunity sikeresen zárta az első két évét a Marson. A járművek túlteljesítették eredeti 90 solos élettartamukat és túlszárnyalták az eredetileg kitűzött 600 méter összesen megtett távolságot. A Spirit vizsgálata alapján kiderült, hogy a Guszev-krátert vulkanikus kőzetek borítják és a talaj felső, 4-6 cm mély rétege erősen összecementálódott porból áll. A rover a megfúrt sziklákban réteges üledékes kőzetet talált és Pot of Gold elnevezésű szikladarabban olyan hematit vasásványra bukkant, amelyek vizes környezetben alakulnak ki. A Clovis nevű sziklában pedig hidroxilt tartalmazó goetit vasásványt talált a Spirit. Mindezek megerősítették a feltételezést, hogy korábban a kráterben volt folyékony víz. A Columbia-dombok erősen mállottak és idősebbnek bizonyultak a síkságnál. Az Opportunity által az Eagle-kráterben és az Endurance-kráterben talált jarozitos kőzetek bizonyítékul szolgáltak annak a feltételezésnek, hogy korábban a Meridiani Planum felett egy sekély tenger hullámzott. A roverekre azonban még sok munka és temérdek felfedeznivaló várt. A következő részben 2018-ig követjük nyomon a két MER történetét.
- Aeromagazin lapszámok: 2003/06, 2004/02, 2004/03, 2004/04, 2004/05, 2004/06, 2004/07, 2004/08, 2004/09, 2004/10, 2005/01, 2005/02, 2005/05, 2005/06, 2005/07 - JetMedia Kiadó Kft.
- Mars Exploration Rover Fact Sheet
- Mars Exploration Rover Surface Operations - Driving Spirit at Gusev Crater
- Mars Exploration Rover Surface Operations - Driving Opportunity at Meridiani Planum
- Mars Exploration Rovers
- Girl with Dreams Names Mars Rovers 'Spirit' and 'Opportunity'
- Forrás: The Athena SDM Rover: a Testbed for Mars Rover Mobility
- Mars Surveyor 2001 Lander
- A Mars Rover’s Great Escape
Kapcsolódó írások
Kerekeken a Naprendszerben 1.
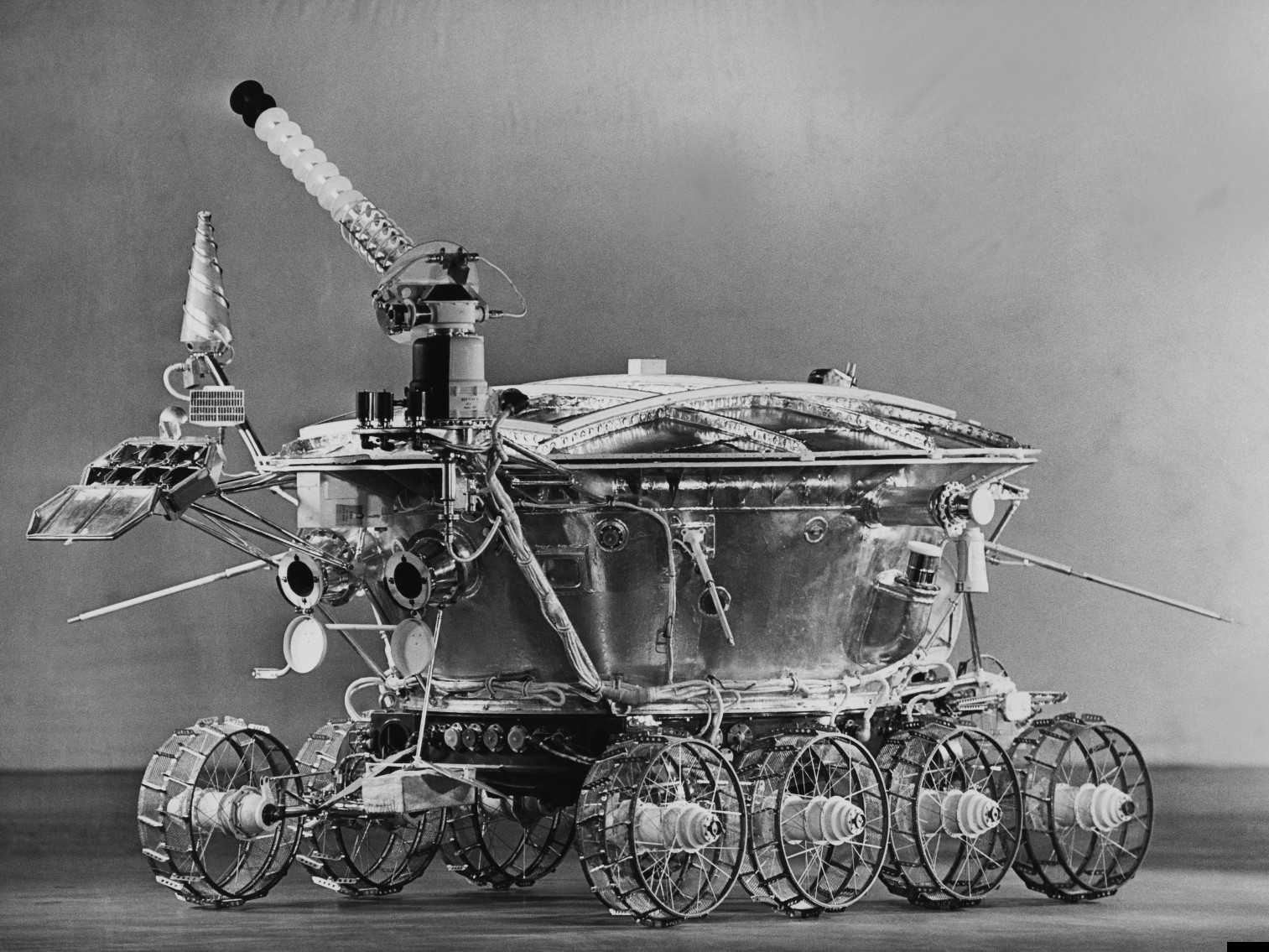
A Lunohod holdjárók
Kerekeken a Naprendszerben 3.
Első járművek a Marson